

Министерство образования Российской Федерации
Сибирский государственный технологический университет
Факультет автоматизации и информационных технологий
Кафедра автоматизации производственных процессов
АНАЛИЗ И СИНТЕЗ ЛИНЕЙНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Пояснительная записка
(АПП. 000000. 103 ПЗ)
Руководитель:
_____________ Г. И. Чмых
(подпись)
_____________________________
(оценка, дата)
Выполнил студент гр. 23-2
_____________ А. В. Иванов
(подпись)
_____________________________
(дата)
Министерство образования Российской Федерации
Сибирский государственный технологический университет
Факультет автоматизации и информационных технологий
Учебная дисциплина: Теория автоматического управления
ЗАДАНИЕ
на курсовую работу
Тема: «Анализ и синтез линейной системы автоматического управления»
Студент: Иванов А.В. гр. 23-2
Дата выдачи: 4 сентября 2002 г.
Срок выполнения: 14 октября 2002 г.
Руководитель: Чмых Г. И.
1 Исходные данные
Параметры звеньев:
1) K1=0,11 K2=360 K3=2,4 K4=4,7;
2) T3=0,94 T4=0,072 T5=0,062.
Показатели качества:
1) время регулирования
![]() =1,6;
=1,6;
2) максимальное
перерегулирование
![]() =25%.
=25%.
Последовательное корректирующее устройство.
2 Графический материал
Р исунок
1 ‑ Структурная схема линейной
автоматической системы
исунок
1 ‑ Структурная схема линейной
автоматической системы
3 Перечень вопросов
1) преобразовать структурную схему и определить передаточную функцию системы в разомкнутом состоянии, передаточную функцию замкнутой системы по заданному каналу, передаточную функцию замкнутой системы по ошибке;
2) исследовать исходную систему на устойчивость по критериям Гурвица, Михайлова, Найквиста. Определить критический коэффициент усиления для неустойчивых систем;
3) выполнить анализ устойчивости исходной системы по логарифмическим частотным характеристикам и оценить по ним запас устойчивости по модулю и фазе и приближенно время регулирования;
4) выполнить синтез системы автоматического регулирования на основе заданных показателей качества;
5) составить передаточные функции скорректированной системы и корректирующего устройства;
6) построить переходный процесс в линейной скорректированной системе при единичном задающем воздействии;
7) определить основные показатели качества скорректированной системы автоматического регулирования;
8) выбрать схему и рассчитать параметры корректирующего устройства.
4 Рекомендуемая литература
1 Макаров И.М., Менский Б.М. Линейные автоматические системы (Элементы теории. Методы расчета и справочный материал). – 2-е изд., перераб. и доп. – М.: Машиностроение, 1982. – 504 с., ил.
2 Теория автоматического управления: Учеб. для вузов по спец. «Автоматика и телемеханика». В 2-х ч. Ч. 1. Теория линейных систем автоматического управления / Н.А. Бабаков, А.А. Воронов, А.А. Воронова и др.; Под ред. А. А. Воронова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 1986. – 367 с., ил.
3 Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. – 4-е изд., перераб. и доп. – М.: Машиностроение, 1978.- 606 с., ил.
Руководитель: __________________
(подпись)
Задание принял к исполнению:
_______________________________
(подпись)
Реферат
В данной курсовой работе рассмотрен анализ и синтез замкнутой линейной системы автоматического регулирования.
В курсовой работе решаются вопросы преобразования структурных схем и составления передаточных функций системы. Использованы различные способы исследования устойчивости, построения переходного процесса, оценки качества систем в установившемся и переходном режимах, а также синтез корректирующего устройства, обеспечивающего заданные показатели качества регулирования.
Пояснительная записка содержит 38 листов текста, 16 рисунков, 5 таблиц, 3 использованных источника.
Содержание
Введение 6
1 Анализ линейной системы автоматического регулирования 7
1.1 Преобразование структурной схемы и определение передаточных функций системы 7
1.2 Исследование системы на устойчивость по критерию Гурвица 11
1.2 Исследование системы на устойчивость по критерию Михайлова 12
1.3 Исследование системы на устойчивость по критерию Найквиста 13
1.4 Определение устойчивости системы по логарифмическим частотным характеристикам 17
2 Синтез линейной системы автоматического регулирования по логарифмическим частотным характеристикам 22
2.1 Построение ЛАЧХ исходной системы 22
2.2 Построение желаемой ЛАЧХ 22
2.3 Проверка запаса устойчивости по фазе скорректированной системы 23
2.4 Передаточная функция разомкнутой скорректированной системы 24
2.5 Построение ЛАЧХ последовательного корректирующего устройства 24
2.6 Передаточная функция корректирующего устройства 25
3 Расчет переходного процесса скорректированной системы 27
3.1 Определение передаточной функции замкнутой скорректированной системы 27
3.2 Расчет вещественной характеристики замкнутой системы 27
3.3 Расчет переходного процесса методом трапеций 30
3.4 Оценка качества переходного процесса 35
4 Выбор схемы и расчет параметров корректирующего устройства 38
4.1 Выбор схемы корректирующего устройства 38
4.2Принципиальная схема корректирующего устройства 40
4.3 Расчет параметров корректирующего устройства 41
Заключение 42
Список использованных источников 43
Введение
Темой работы является анализ и синтез замкнутой линейной системы автоматического регулирования САР. Выполнение курсовой работы способствует более глубокому пониманию курса и получению практических навыков расчета и проектирования систем автоматического регулирования.
При выполнении курсового проекта решаются вопросы, охватывающие почти все разделы теории стационарных непрерывных линейных систем автоматического регулирования.
Большое внимание уделено преобразованию структурных схем и составлению передаточных функций системы, различным способам исследования устойчивости, построению переходного процесса, оценке качества систем в установившемся и переходном режимах, а также синтезу корректирующего устройства, обеспечивающего заданные показатели качества регулирования.
Решение отдельных задач курсового проекта требует применения справочного материала (номограмм, диаграмм, таблиц и пр.), основная часть которого приводится в методических указаниях.
Приведенные методы расчета позволяют решать задачи с использованием электронной вычислительной техники на основе стандартных программ современных ЭВМ.
1 Анализ линейной системы автоматического регулирования
1.1 Преобразование структурной схемы и определение передаточных функций системы
Приведем заданную структурную схему к одноконтурной с помощью последовательных преобразований (рисунок 2).
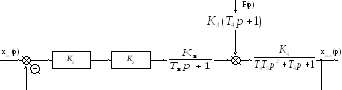

Р исунок
2 – Преобразование исходной структурной
схемы
исунок
2 – Преобразование исходной структурной
схемы
На рисунке 2 приняты следующие обозначения:
![]() ‑передаточные
функции элементов прямой цепи;
‑передаточные
функции элементов прямой цепи;
![]() ‑передаточная
функция возмущающего воздействия;
‑передаточная
функция возмущающего воздействия;
![]() ‑входной и
выходной сигналы соответственно.
‑входной и
выходной сигналы соответственно.
Передаточные функции элементов прямой цепи
![]() ,
,![]() , (1.1)
, (1.1)
где
![]() ‑ коэффициент усиления первого звена
прямой цепи.
‑ коэффициент усиления первого звена
прямой цепи.
Передаточная функция возмущающего воздействия
![]() . (1.2)
. (1.2)
Передаточная функция разомкнутой системы
![]() , (1.3)
, (1.3)
где
![]() ‑ общий коэффициент усиления прямой
цепи;
‑ общий коэффициент усиления прямой
цепи;
![]() ‑коэффициенты
собственного оператора.
‑коэффициенты
собственного оператора.
Подставив численные значения, получим
![]() . (1.4)
. (1.4)
Передаточная функция замкнутой системы по возмущающему воздействию
![]() , (1.5)
, (1.5)
где
![]() ‑ общий коэффициент усиления замкнутой
системы;
‑ общий коэффициент усиления замкнутой
системы;
![]() ‑коэффициенты
собственного оператора.
‑коэффициенты
собственного оператора.
Подставив численные значения, получим
![]() . (1.6)
. (1.6)
При получении
передаточной функции по возмущающему
воздействию полагаем, что задающее
воздействие
![]() .
Для получения передаточной функции по
возмущающему воздействию преобразуем
структурную схему к виду показанному
на рисунке 3
.
Для получения передаточной функции по
возмущающему воздействию преобразуем
структурную схему к виду показанному
на рисунке 3
Р исунок
3 – Структурная схема по возмущающему
воздействию
исунок
3 – Структурная схема по возмущающему
воздействию
Далее, используя правило переноса сумматора через звено, получим эквивалентную структурную схему (рисунок 4).

Рисунок 4 – Эквивалентная схема по возмущающему воздействию
На рисунке 4 принято следующее условное обозначение:
![]() ‑передаточная
функция дополнительного звена.
‑передаточная
функция дополнительного звена.
Тогда передаточная функция замкнутой системы по возмущающему воздействию запишется в виде
![]() . (1.7)
. (1.7)
Раскрыв, данное соотношение, получим
 , (1.8)
, (1.8)
где
![]() ‑ общий коэффициент усиления по
возмущающему воздействию;
‑ общий коэффициент усиления по
возмущающему воздействию;
![]() ‑коэффициенты
собственного оператора;
‑коэффициенты
собственного оператора;
![]() ‑коэффициенты
оператора возмущающего воздействия.
‑коэффициенты
оператора возмущающего воздействия.
Подставив численные значения, получим
![]() . (1.9)
. (1.9)
Передаточная функция замкнутой системы по ошибке для задающего воздействия
![]() , (1.10)
, (1.10)
где
![]() ‑ передаточная функция разомкнутой
системы.
‑ передаточная функция разомкнутой
системы.
Преобразуя данное отношение, получим
 , (1.11)
, (1.11)
где
![]() ‑ коэффициенты собственного оператора;
‑ коэффициенты собственного оператора;
![]() ‑коэффициенты
оператора по ошибке воздействия.
‑коэффициенты
оператора по ошибке воздействия.
Подставив численные значения, получим
![]() . (1.12)
. (1.12)