

7.6 Пример построения цифровой системы телеизмерения
Рассмотрим подробнее работу многоканальной цифровой системы телеизмерения, в которой разделение каналов осуществляется по времени с использованием циклической синхронизации, а передача информации происходит методом кодоимпульсной модуляции (КИМ). Упрощенная структурная схема, иллюстрирующая принцип действия такой системы, показана на рис. 7.11, а. Работой всех блоков КП управляет хронизатор (ХР), обеспечивающий выдачу точных отметок времени. Он представляет собой совокупность высокостабильного импульсного генератора, работающего в автоколебательном режиме, делителей частоты и элементов задержки.
Коммутатор К задает канальные промежутки времени или подциклы Δti и через конъюнкторы (И) подключает датчики сигналов xi к аналого-цифровому преобразователю (АЦП). АЦП преобразует аналоговый сигнал очередного датчика в параллельный двоичный код и записывает его в буферный регистр (БР).
Преобразователь кода (ПК) последовательно, разряд за разрядом (обычно начиная со старшего), считывает код из БР, преобразуя его в последовательность импульсов. На рис. 7.11, б единице соответствует наличие импульса, нулю – отсутствие, причем импульсы следуют без пауз. Частота считывания задается хронизатором. Таким образом, ковъюнкторы, АЦП, БР и ПК в совокупности выполняют роль кодоимпульсного модулятора.
По окончании подцикла коммутатор через соответствующий конъюнктор подключает следующий датчик к АЦП, разрешает прием очередного кода в БР и подцикл повторяется. Сформированная последовательность импульсов поступает в устройство защиты от ошибок. УЗО обеспечивает защитное кодирование передаваемой информации на основе того или иного корректирующего кода, повышающего верность передачи.
Синхронизация работы КП и ПУ обеспечивается передачей специального синхросигнала. Для этого в начале каждого цикла коммутатор запускает формирователь синхросигнала (ФС), который вырабатывает такую последовательность импульсов, которая не может встретиться в информационных последовательностях отдельных каналов или в их сочетаниях, а вероятность образования такой последовательности в результате искажений в канале пренебрежимо мала. Это позволяет при приеме безошибочно выделить этот синхросигнал и обеспечить тем самым точное совпадение начала циклов работы КП и ПУ. После выдачи синхросигнала и опроса всех датчиков цикл повторяется.
Сформированный после сумматора групповой сигнал поступает в устройство преобразования сигнала (УПС), где при помощи модема преобразуется к виду, удобному для передачи по каналу связи. Вид преобразования зависит от вида используемого канала связи. Как правил, применяют непрерывную модуляцию (ЧМ или ФМ). Кроме преобразования сигналов, УПС обеспечивает также переключение режимов работы аппаратуры: передача или прием информации.
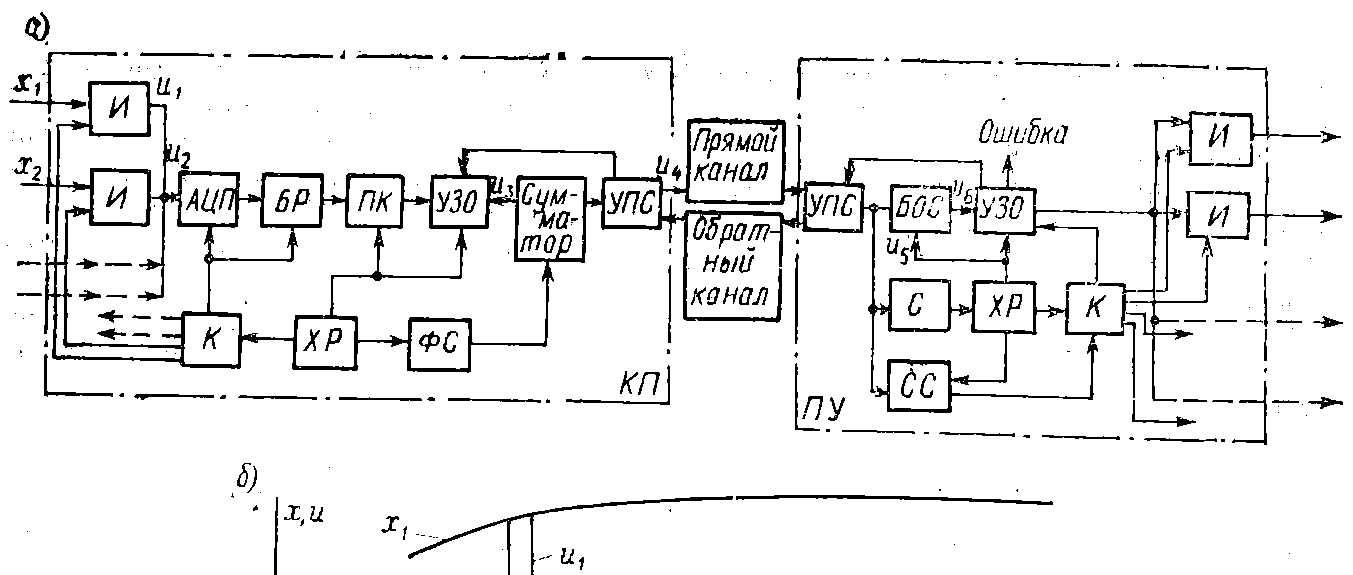
Пройдя по каналу связи, сигнал поступает в УПС пункта управления, где происходит его обратное преобразование – демодуляция. Конечно, воздействие помех в канале приводит к тому, что принятый сигнал (рис. 7.11, д) заметно отличается от переданного.
Работой всех блоков ПУ также управляет хронизатор, вырабатывающий импульсы с той же частотой, что и хронизатор КП. Но задержкой вырабатываемых импульсов и в небольших пределах частотой хронизатора ПУ можно управлять. Это позволяет устранить фазовые и частотные расхождения в работе обоих хронизаторов и обеспечить точную синхронизацию КП и ПУ по тактам. Управление хронизатором осуществляет синхронизатор С, выделяющий фронты принятых импульсов.
Важнейшей частью ПУ является блок регенерации, или блок опознавания символов (БОС), реализующий высокую потенциальную точность цифровой модуляции. БОС восстанавливает искаженные в канале импульсы, сравнивая в задаваемые хронизатором моменты времени уровень принятого сигнала с некоторым пороговым уровнем Uпор. Если уровень принятого сигнала больше то считается, что была передана 1, и БОС формирует импульс; если уровень сигнала меньше Uпор то импульс не формируется.
Синхронизацию работы КП и ПУ по циклам осуществляет селектор синхроимпульсов (СС). Он выделяет из принятой последовательности импульсов синхросигнал и запускает коммутатор ПУ. Коммутатор разбивает цикл Тц на под циклы Δti и, в свого очередь запускает УЗО. УЗО декодирует восстановленную после БОС импульсную последовательность, отбрасывая служебные разряды. В зависимости от использованного кода и типа ошибок УЗО исправляет или только обнаруживает ошибки. В случае невозможности исправить ошибку УЗО блокирует дальнейшую передачу и сообщает об этом на КП по обратному каналу. Коммутатор при помощи конъюнкторов распределяет проверенные кодовые последовательности по своим каналам.
Дальнейшие преобразования принятого сигнала определяются получателем информации данного канала. Для ввода в ЦВМ код преобразуется из последовательного в параллельный; для вывода на аналоговый индикатор сигнал преобразуется в аналоговую форму и т. д.
Определение основных параметров системы. Рассчитаем основные параметры рассмотренной системы ТИ при следующих исходных данных: число датчиков равно 5; максимальная частота изменения входных сигналов fmax = 5 Гц (одинакова для всех датчиков); относительная погрешность измерения δх/Хmах = 0,5%.
1 Примем, что ошибки, вносимые линией связи и другими устройствами, незначительны. Тогда указанная погрешность 0,5 % будет являться ошибкой квантования по уровню. Отсюда число уровней квантования М входного сигнала (см. рис. 6-2):
![]()
2. Определяем число разрядов двоичного кода
![]()
Примем n = 7, т. е. для передачи сигналов используем 7-разрядный код.
З. для повышения верности передаваемой информации введем одиночную проверку каждой двоичной комбинации на нечетность. Для этого потребуется один дополнительный разряд (t = 1), который будет формироваться в УЗО КП после каждой комбинации (рис. 7.11, а). Такой способ защиты позволит обнаруживать одиночные ошибки. На рис. 7.11, в код второго канала принят с ошибкой, которая будет обнаружена УЗО КП, так как число единиц в принятой комбинации стало четным.
4. В качестве синхросигнала примем последовательность из десяти единиц, которая не может встретиться в информационных комбинациях.
5. По теореме Котельникова определим необходимую частоту опроса датчиков. Возьмем коэффициент запаса k3 = 2. Тогда согласно (6-2):
![]()
Соответственно время цикла
![]()
6. За время цикла должно быть передано 5 канальных кодовых комбинаций по 8 разрядов и синхросигнал длиной 10 разрядов. Отсюда тактовая частота хронизатора составит
![]()
а длительность подцикла
![]()
7. При рассчитанной частоте хронизатора скорость передачи информация не превысит 1000 бит/с. Поэтому можно использовать стандартный модем на скорость 1200 бит/с (например, марки ЕС-8005). Этот модем предназначен для передачи информации по телефонному коммутируемому каналу методом ЧМ. Несущая частота составляет 1700 Гц, девиация ±400 Гц. Поэтому передача единиц будет осуществляться частотой 2100 Гц, а нулей – частотой 1300 Гц (рис. 7.11, а). В реальных системах телемеханика требуется и обратный канал (например, для передачи запроса при использовании РОС). Для обратной передачи в нижней части частотного спектра телефонного канала организуется обратный канал с несу щей частотой 420 Гц, рассчитанный на скорость передачи до 75 бит/с.