

Копия методич указ к контрольной передел
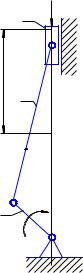
.pdfЗАДАНИЕ 8.
в.м.т. |
S |
|
н.м.т. |
А |
1 |
|
|
|
|||
|
|
|
|
||
3 |
|
2 |
S2 |
l2 |
|
|
|
|
l1 |
||
|
|
|
1 |
||
В |
|
|
|
||
Fпс |
|
|
|
|
О |
Бетононасос. Основным механизмом бетононасоса является кривошипноползунный механизм, который преобразует вращательное движение кривошипа 1 в поступательное движение ползуна (поршня) 3. Цикл движения поршня совершается за один поворот кривошипа и включает такты всасывания и нагнетания. Рабочий цикл в цилиндре двигателя совершается за один оборот кривошипа
Исходные данные
ПАРАМЕТР |
|
|
ЧИСЛОВЫЕ ЗНАЧЕНИЯ ВАРИАНТОВ |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Угол поворота |
210 |
240 |
300 |
330 |
30 |
60 |
120 |
150 |
135 |
45 |
|
кривошипа, град |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Угловая скорость |
4 |
4,5 |
5 |
5,5 |
6 |
6,5 |
6,4 |
6,2 |
5,8 |
5,6 |
|
кривошипа ω, с-1 |
|||||||||||
Длина кривошипа |
0,25 |
0,24 |
0,23 |
0,22 |
0,21 |
0,2 |
0,19 |
0,18 |
0,17 |
0,16 |
|
l1, м |
|
|
|
|
|
|
|
|
|
|
|
Длина шатуна l2, м |
0,875 |
0,864 |
0,851 |
0,836 |
0,819 |
0,8 |
0,779 |
0,756 |
0,731 |
0,704 |
|
Расстояние AS2 l3, |
0,22 |
0,216 |
0,21 |
0,209 |
0,2 |
0,2 |
0,19 |
0,189 |
0,18 |
0,176 |
|
м, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Масса кривошипа, |
17,5 |
17,28 |
17 |
16,72 |
16,38 |
16 |
16,58 |
15,12 |
14,62 |
14 |
|
кг |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Масса шатуна, кг |
8,75 |
8,64 |
8,51 |
8,36 |
8,19 |
8 |
7,79 |
7,56 |
7,31 |
7,04 |
|
Масса ползуна, кг |
21,88 |
21,6 |
21,28 |
20,9 |
20,48 |
20 |
19,48 |
18,9 |
18,28 |
17,6 |
|
Момент инерции |
|
|
|
|
|
|
|
|
|
|
|
относительно |
1,3 |
1,24 |
1,17 |
1,07 |
0,99 |
0,93 |
0,87 |
0,81 |
0,75 |
0,69 |
|
центров масс |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
шатуна IS2 |
|
|
|
|
|
|
|
|
|
|
|
Значение силы, кН |
0 |
0 |
0 |
0 |
67 |
117 |
103 |
47 |
74 |
85 |
|
11

|
О |
l1 |
|
|
|
1 |
|
|
|
|
|
|
|
1 |
А |
|
|
|
|
|
|
|
l2 |
|
|
S2 |
|
н.м.т. |
|
|
|
|
|
2 |
|
S |
|
|
|
|
|
В |
|
в.м.т. |
|
3 |
|
|
|
Рд |
|
ЗАДАНИЕ 9.
Автомобиль с четырехтактным двигателем внутреннего сгорания. Основным механизмом двигателя внутреннего сгорания является кривошипно-ползунный механизм, который преобразует возвратнопоступательное движение ползуна (поршня) 3 во вращательное движение кривошипа 1. Передача движения от ползуна к кривошипу осуществляется через шатун 2. Цикл движения поршней включает такты расширения, выпуска и сжатия. Взорвавшаяся в камере сгорания рабочая смесь перемещает поршень из н.м.т. в в.м.т. Отработанные газы удаляются в выпускную систему. При выпуске цилиндр заполняется чистым воздухом, который в такте сжатия сжимается до 1,5 мПа
Исходные данные
ПАРАМЕТР |
|
|
ЧИСЛОВЫЕ ЗНАЧЕНИЯ ВАРИАНТОВ |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Угол поворота |
300 |
330 |
30 |
60 |
120 |
150 |
210 |
240 |
315 |
45 |
|
кривошипа, град |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Угловая скорость |
200 |
205 |
210 |
215 |
220 |
225 |
230 |
235 |
240 |
250 |
|
кривошипа ω, с-1 |
|||||||||||
Длина кривошипа |
0,075 |
0,075 |
0,07 |
0,07 |
0,065 |
0,06 |
0,055 |
0,05 |
0,05 |
0,045 |
|
l1, м |
|
|
|
|
|
|
|
|
|
|
|
Длина шатуна l2, м |
0,3 |
0,375 |
0,29 |
0,28 |
0,27 |
0,26 |
0,24 |
0,23 |
0,2 |
0,19 |
|
Расстояние AS2 l3, |
0,1 |
0,12 |
0,1 |
0,09 |
0,09 |
0,08 |
0,08 |
0,07 |
0,07 |
0,06 |
|
м, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Масса кривошипа, |
6 |
7,5 |
5,8 |
5,6 |
5,4 |
5,2 |
4,8 |
4,6 |
4 |
3,8 |
|
кг |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Масса шатуна, кг |
3 |
3,75 |
2,9 |
2,8 |
2,7 |
2,6 |
2,4 |
2,3 |
2 |
1,9 |
|
Масса ползуна, кг |
1 |
1,21 |
1 |
0,9 |
0,9 |
0,8 |
0,8 |
0,7 |
0,7 |
0,6 |
|
Момент инерции |
|
|
|
|
|
|
|
|
|
|
|
относительно |
0,068 |
0,089 |
0,063 |
0,057 |
0,052 |
0,046 |
0,039 |
0,027 |
0,019 |
0,012 |
|
центров масс |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
шатуна IS2 |
|
|
|
|
|
|
|
|
|
|
|
Значение силы, Н |
37400 |
22570 |
12570 |
4231 |
679 |
4567 |
13568 |
26788 |
29564 |
78954 |
|
12
|
3 |
Рд |
|
в.м.т. |
|
|
|
|
|
0 |
|
|
|
В |
|
S |
|
|
|
|
2 |
|
|
н.м.т. |
|
|
|
S2 |
|
|
|
l2 |
|
|
|
А |
|
1 |
|
1 |
|
|
|
|
|
l1 |
О |
|
|
|
ЗАДАНИЕ 10.
Самоходное шасси с двухтактным двигателем внутреннего сгорания предназначено для перемещения грузов. Кривошипноползунный механизм двигателя преобразует возвратно-поступательное движение ползуна (поршня) 3 во вращательное движение кривошипа 1. Цикл движения поршней включает такты расширения (в конце такта открываются выпускные клапаны и продувочные окна цилиндра и продукты горения удаляются в выпускную систему) и такт сжатия, заканчивающийся взрывом впрыснутого в цилиндр топлива.
Исходные данные
ПАРАМЕТР |
|
|
ЧИСЛОВЫЕ ЗНАЧЕНИЯ ВАРИАНТОВ |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Угол поворота |
60 |
30 |
330 |
300 |
240 |
210 |
150 |
120 |
45 |
315 |
|
кривошипа, град |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Угловая скорость |
220 |
215 |
210 |
205 |
200 |
195 |
190 |
185 |
180 |
170 |
|
кривошипа ω, с-1 |
|||||||||||
Длина кривошипа |
0,04 |
0,042 |
0,045 |
0,047 |
0,05 |
0,05 |
0,055 |
0,06 |
0,06 |
0,065 |
|
l1, м |
|
|
|
|
|
|
|
|
|
|
|
Длина шатуна l2, м |
0,2 |
0,21 |
0,2 |
0,18 |
0,195 |
0,2 |
0,22 |
0,3 |
0,27 |
0,25 |
|
Расстояние AS2 l3, |
0,07 |
0,074 |
0,07 |
0,063 |
0,068 |
0,07 |
0,077 |
0,11 |
0,095 |
0,88 |
|
м, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Масса кривошипа, |
4 |
4,2 |
4 |
3,6 |
3,9 |
4 |
4,4 |
6 |
5,4 |
5 |
|
кг |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Масса шатуна, кг |
2 |
2,1 |
2 |
1,8 |
1,95 |
2 |
2,2 |
3 |
2,7 |
2,5 |
|
Масса ползуна, кг |
0,6 |
0,63 |
0,6 |
0,5 |
0,58 |
0,6 |
0,66 |
0,9 |
0,81 |
0,75 |
|
Момент инерции |
|
|
|
|
|
|
|
|
|
|
|
относительно |
0,021 |
0,023 |
0,021 |
0,01 |
0,017 |
0,021 |
0,025 |
0,046 |
0,039 |
0,028 |
|
центров масс |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
шатуна IS2 |
|
|
|
|
|
|
|
|
|
|
|
Значение силы, Н |
17540 |
13660 |
5430 |
1460 |
455 |
2450 |
7454 |
14678 |
15677 |
3566 |
|
13
Пример оформления расчетно-пояснительной записки
и графической части
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
( н а и м е н о в а н и е в у з а )
К а ф е д р а
Расчетно-пояснительная записка
к контрольной работе по
теории машин и механизмов на тему
« |
|
» |
задание____ вариант____
Выполнил: |
студент гр.__________Иванов И.И. |
Руководитель: |
Петров П.П. |
200__ г
(город)
14
Задание
15
1. Структурный анализ механизма
Кривошипно-ползунный механизм состоит из четырех звеньев:
0– стойка,
1– кривошип,
2– шатун,
3– ползун.
Также имеются четыре кинематические пары:
I – стойка 0-кривошип OA
II – кривошип OA-шатун AB
III – шатун AB-ползун B
IV – ползун B-стойка 0.
I, II и III являются вращательными парами
IV – поступательная пара.
Все кинематические пары являются низшими, т.е. pнп=_, pвп=_. Степень подвижности механизма определяется по формуле Чебышева:
W 3 n 2pнп pвп,
где n – число подвижных звеньев, n =_ pнп – число низших пар,
pвп – число высших пар.
W _________ _.
По классификации И.И. Артоболевского данный механизм состоит из механизма I
класса стойка 0-кривошип OA и структурной группы II класса второго порядка шатун
AB-ползун B . Из этого следует, что механизм является механизмом II класса.
16
2. Кинематический анализ механизма
2.1 План положений
План положений это графическое изображение механизма. Начальное положение кривошипа задается углом 0, отсчитанным от положительного направления горизонтальной оси кривошипного вала против часовой стрелки. Для данного механизма 0 __ рад.
Выбираем масштабный коэффициент длин l:
l l1 OA,
где l1 действительная длина кривошипа, м
OA изображающий её отрезок на плане положений, мм
l _ _ _ м мм.
Отрезок AB, изображающий длину шатуна l2 на плане положений, будет:
AB l2 l,
AB _ _ _ мм.
Расстояние от точки А до центра масс S2 шатуна на плане положений:
AS2 l3 l,
AS2 _ _ _ мм.
2.2 Планы скоростей и ускорений
Скорость точки А находим по формуле:
VA 1 l1,
где 1 – угловая скорость кривошипа, с-1. l1 – длина кривошипа, м.
VA _ _ _ м с
Выбираем масштабный коэффициент плана скоростей V:
V VA Pa,
где VA скорость точки A, м с
Pa изображающий ее отрезок на плане скоростей, мм.
V _ _ _.
17

Из полюса P в направлении вращения кривошипа перпендикулярно к OA
откладываем отрезок Pa, изображающий вектор скорости точки A, длиной _ мм. Определяем скорость точки В:
V B V A V BA,
где V BA- вектор скорости точки B при ее вращательном движении относительно точки A и перпендикулярен к звену AB.
Далее на плане скоростей из точки а проводим прямую перпендикулярно звену AB
до пересечения с линией действия скорости точки B (направления движения ползуна).
Полученный отрезок Pb __ мм, является вектором абсолютной скорости точки B, а
отрезок ab _ мм, - вектором скорости точки В относительно точки А.
Тогда
VB Pb V,
VB _ _ _ м c
VBA ab V,
VBA _ _ _ м с.
Скорость точки S2 находим из условия подобия:
as2 ab AS2 AB,
Откуда
as2 AS2 AB ab,
as2 _ _ _ _ мм.
Соединив точку S2 с полюсом P, получим отрезок, изображающий вектор скорости точки S2, т.е. Ps2 _ мм.
Тогда
VS2 Ps2 V,
VS2 _ _ _ м с.
Угловую скорость шатуна AB определяем по формуле:
2 VBA l2,
2 ___ ___ ____ c-1.
Нормальное ускорение точки A по отношению к точке О при условии 1= const
равно:
18
aA 12 l1,
aA ___2 ___ ___ м с2.
Выбираем масштабный коэффициент плана ускорений a:
a aA Pa,
где aA – нормальное ускорение точки A, м с2
Pa – отрезок, изображающий его на плане ускорений, мм.
a ___ ___ ____ м с2 мм.
Из полюса P откладываем отрезок Pa, являющийся вектором нормального ускорения точки A кривошипа, который направлен к центру вращения кривошипа.
Определяем ускорение точки B:
|
|
|
|
aB aA aBA, |
где |
|
|
|
вектор ускорения точки B при вращательном движении |
a |
an |
a |
||
|
BA |
BA |
BA |
|
относительно точки A.
Определяем ускорение a nBA :
a nBA V 2BA l2,
a nBA ___2 ___ ____ м c2.
На плане ускорений из точки a проводим прямую, параллельно звену AB и
откладываем на ней в направлении от точки B к точке A отрезок an, представляющий собой нормальную компоненту ускорения anBA в масштабе a.
an a nBA a,
an ___ ___ ____ м c2 мм.
Из точки n проводим прямую перпендикулярную звену AB до пересечения с линией действия ускорения точки B (ползуна). Полученный отрезок nb __ мм, представляет собой вектор касательного ускорения токи B относительно точки А, а отрезок Pb __ мм,
- вектор абсолютного ускорения точки B.
Тогда
a BA nb a,
a BA ___ ___ ____ м с2
aB Pb a,
19
aB ___ ___ ____ м c2.
Соединив точки a и b, получим отрезок ab __ мм, изображающий вектор полного ускорения точки B относительно точки А.
Тогда
aBA ab a,
aBA ___ ___ ____ м с2.
Ускорение точки S2 находим из условия подобия:
as2 ab AS2 AB,
Откуда
as2 AS2 AB ab, as2 _ _ _ _ мм.
Соединив точку s2 с полюсом P, получим отрезок, изображающий вектор скорости точки S2, т.е. Ps2 _ мм.
Тогда
aS2 Ps2 a,
aS2 ___ ___ ____ м с2.
Угловое ускорение шатуна AB определяем по формуле:
2 a BA l2,
2 ___ ___ ____ c-2.
3. Силовой расчет
Основной задачей силового расчета является определение реакций в кинематических парах механизма и внешней уравновешивающей силы, являющейся реактивной нагрузкой со стороны отсоединенной части машинного агрегата. В основу силового расчета положен принцип Даламбера, позволяющий применять уравнения равновесия кинетостатики, учитывая инерционную нагрузку для определения реакций связей. При этом рассматриваются статически определимые кинематические цепи
группы Ассура и механизм I класса, т.е. звено кривошипа.
20