

Синхронные машины_UP3_end_ZEI
.pdfТоки фаз на рис. 1.5, лист 2а имеют такое же направление, как и на рис. 1.5, лист 1б, вследствие чего и ориентация магнитного потока якоря в пространстве является такой же. Но в этом случае поле якоря Фаd замыкается уже по продольной оси d (а не по оси q, как при активной R-нагрузке). Таким образом, при индуктивной нагрузке реакция якоря является продольной (термин 18, с. 13) и
размагничивающей, так как поле возбуждения Фв (полюсы Nв и Sв) и поле яко-
ря Фаd (полюсы Nа и Sа) направлены навстречу друг другу.
Продольная реакция якоря Фаd при индуктивной нагрузке уменьшает результирующее поле, обусловленное совместным действием магнитодвижущих сил обмоток возбуждения и якоря. Кроме того, вращающееся поле Фаd продольной реакции якоря индуцирует эдс eаd в обмотке якоря.
Такой характер поля реакции якоря при ψ = 90° сохраняется при любом положении вращающегося ротора (а не только при положении, зафиксированном на рис. 1.5, лист 2а), так как ротор и поле реакции якоря вращаются синхронно.
5.7. Влияние реакции якоря при емкостной нагрузке (С). Так как к обмотке якоря подключена емкостная С-нагрузка и активным сопротивлением обмотки пренебрегаем, то ток в обмотке якоря опережает эдс по фазе на угол ψ = −90° и, следовательно, в момент времени t1 = 0 c эдс в фазе А–X максимальна, e0А = E0m, а ток в ней равен нулю iaА = 0 (рис. 1.5, лист 2б).
Максимум тока в фазе А–X имел место по сравнению со случаем, представлен-
ным на рис. 1.5, лист 1б, на четверть периода раньше, t1 − t2 = −0,005 с. В этот момент времени (t3) ротор занимал положение, повернутое против направления его вращения на четверть оборота (рис. 1.5, лист 2б).
Токи фаз на рис. 1.5, лист 2б имеют такое же направление, как и на рис. 1.5, лист 1б и на рис. 1.5, лист 2а, вследствие чего и ориентация магнитного потока
якоря в пространстве остается без изменений. В этом случае поле якоря Фаd замыкается также по продольной оси d (как и при индуктивной L-нагрузке).
При емкостной нагрузке реакция якоря является также продольной (как и при
индуктивной), но намагничивающей, так как поле возбуждения Фв (полюсы Nв и Sв) и поле якоря Фаd (полюсы Sа и Nа) направлены согласно.
Продольная реакция якоря Фаd при емкостной нагрузке увеличивает результирующее поле, обусловленное совместным действием магнитодвижущих сил
обмоток возбуждения и якоря. Кроме того, вращающееся поле Фаd продольной реакции якоря индуцирует эдс eаd в обмотке якоря.
50

Такой характер поля реакции якоря при ψ = −90° сохраняется при любом положении вращающегося ротора (а не только при положении, зафиксированном на рис. 1.5, лист 2б), так как ротор и поле реакции якоря вращаются синхронно.
5.8. Влияние реакции якоря при активно-индуктивной нагрузке (R−L). Так как к обмотке якоря подключена активно-индуктивная нагрузка, то ток в обмотке якоря может отставать от эдс e0 по фазе на угол 0 < ψ < +90°, Конкретное значение угла ψ зависит от соотношения между активной и реактивной составляющими сопротивления нагрузки. Примем для определенности угол ψ = +40°. В момент времени t1 = 0 c эдс в фазе А–X максимальна, e0А = E0m, а мгновенное значение тока iaА в ней меньше максимального (рис. 1.5, лист 3).
Максимум тока в фазе А–X наступит по сравнению со случаем, представленным на рис. 1.5, лист 1б, на 1/9 часть периода позже, т.е. через время t4 = 0,0022 с. За это время ротор повернется по направлению вращения на 1/9 часть оборота и займет положение, показанное на рис. 1.5, лист 3.
Токи фаз на рис. 1.5, лист 3 имеют такое же направление, как и на рис. 1.5, лист 2, вследствие чего и ориентация магнитного потока якоря в пространстве является такой же. Но в этом случае поле якоря Фа и создавшая его мдс якоря Fа замыкаются уже не по продольной оси d, а по некоторой радиальной оси, которая расположена между осями d и q.
Очевидно следующее. При изменении активно-индуктивной нагрузки будет изменяться и угол ψ в пределах 0 < ψ < +90°, а следовательно, и положение ротора. Поэтому при различных значениях угла ψ поле якоря Фа и создавшая его
мдс якоря Fа будут замыкаться по различным радиальным осям, расположен-
ным между осями d и q. Следовательно, будет изменяться магнитное сопротив-
ление Rмг полю якоря от минимального значения до максимального,
Rмг.d < Rмг < Rмг.q. Это создает сложности при анализе явнополюсной синхрон-
ной машины, так как в связи с изменением этого сопротивления будут изменяться все электрические и магнитные величины, относящиеся к якорю: магнитное поле якоря; эдс, индуцируемая этим полем в обмотке якоря; ток обмотки якоря; индуктивное сопротивление обмотки якоря и др. Для устранения сложностей анализа явнополюсной синхронной машины и разработана теория двух реакций, в соответствии с которой все электрические и магнитные величины относящиеся к якорю, рассматривают в осях d и q (система координат d, q), взаимно смещенных на 90° эл. В связи с этим определяют проекции на оси d и q величин, относящихся к якорю.
51
На рис. 1.5, лист 3 показаны проекции тока якоря Ia и проекции мдс якоря Fa , которые в общем случае, когда 0 < ψ < +90°, определяются по выражениям:
Id = Ia sin ψ; |
Iq = Ia cos ψ; |
(1.6) |
Fad = Fa sin ψ; |
Faq = Fa cos ψ, |
(1.7) |
где Id – продольная составляющая тока или продольный ток якоря, он создает продольную мдс Fad реакции якоря; Iq – поперечная составляющая тока или поперечный ток якоря, он создает поперечную мдс Faq реакции якоря.
Справедливы следующие логические цепочки:
Id → Fad → Фad → Ėad = jİd Xad ; |
(1.8) |
Iq → Faq → Фaq → Ėaq = jİq Xaq , |
(1.9) |
где Фad – основное поле обмотки якоря, замыкающееся в теле ротора вдоль оси d, и индуцирующее в этой обмотке эдс продольной реакции якоря еad; Фaq – основное поле обмотки якоря, замыкающееся в теле ротора вдоль оси q, и индуцирующее в этой обмотке эдс поперечной реакции якоря еaq;
Xad – продольное индуктивное сопротивление обмотки якоря продольному
току Id; Xaq – поперечное индуктивное сопротивление обмотки якоря попе-
речному току Iq .
Итак, при активно-индуктивной нагрузке реакция якоря имеет две составляющие: продольную размагничивающую Фаd, которая уменьшает результирую-
щее поле; поперечную составляющую Фаq, которая вызывает искажение кривой результирующего поля в воздушном зазоре. Вращающееся поле Фаd продольной реакции якоря индуцирует эдс eаd в обмотке якоря, а вращающееся поле Фаq поперечной реакции якоря – эдс eаq.
Удобство анализа явнополюсной синхронной машины в осях d и q заключается в том, что при любом соотношении между активной и индуктивной составляющими смешанной R–L-нагрузки, составляющие поля якоря Фad и Фaq будут замыкаться в установившемся режиме работы машины по путям с
неизменным |
магнитным сопротивлением, соответственно, |
Rмг.d = const и |
Rмг.q = const. |
Подчеркнем, что Rмг.d < Rмг.q, так как |
различны длины |
немагнитных зазоров вдоль осей d и q, δd < δq (см. рис. 1.2а и рис. 1.5, лист 3).
52
Следовательно, и все проекции величин, относящихся к обмотке якоря, также будут неизменными.
В явнополюсной синхронной машине Xad > Xaq. Чем сильнее реакция якоря, тем больше Xad и Xaq и тем меньше запас статической устойчивости при работе машины (Работа № 3, с. 129). Значения Xad и Xaq для современных синхронных машин, выраженные в относительных единицах, приведены в Приложении к Работе № 2 (с. 112).
Величины Xad и Xaq обратно пропорциональны величине воздушного зазора вдоль осей d и q. Для ограничения влияния реакции якоря желательно, чтобы
значения Xad и Xaq не превосходили определенных пределов. Поэтому величину
зазора δ в синхронных машинах приходится брать больше, чем это необходимо по механическим условиям.
Необходимо, однако, иметь в виду, что увеличение δ требует усиления обмотки возбуждения, что связано с увеличением расхода обмоточного провода, а в ряде случаев, в связи с затруднениями в размещении обмотки возбуждения, требуется также некоторое увеличение габаритов машины.
Поэтому уменьшение Xad и Xaq ведет к удорожанию машины.
Стремление к увеличению мощности машин при заданных габаритах привело к применению более интенсивных способов охлаждения (внутреннее водородное и водяное охлаждение обмоток) и к увеличению линейных нагрузок А в несколько раз [от А = (5,0…6,5)·104 А/м в машинах с воздушным охлаждением до А = (15…25)·104 А/м]. В таких машинах для ограничения величин Xad и Xaq необходимо значительно увеличивать δ (см. табл. 1.1).
В неявнополюсной синхронной машине зазор по различным радиальным осям практически неизменен (см. рис. 1.2б), поэтому нет необходимости рассматривать электрические и магнитные величины якоря в осях d и q.
6. Векторные диаграммы напряжений синхронных генераторов при симметричной нагрузке
Одним из инструментов анализа синхронных машин являются векторные диаграммы. При помощи векторных диаграмм можно определить ток возбуждения (мдс обмотки возбуждения), необходимый для обеспечения заданного режима работы (разд. 7.8, с. 66), падение напряжения при нагрузке, повышение напря-
жения при сбросе нагрузки, а также угол θвр между векторами эдс Е0 в обмотке
53

статора от поля ротора и напряжения U. Оперируя углом θвр, проводят анализ
параллельной работы синхронных генераторов (Работа № 3, с. 124).
Далее приводятся векторные диаграммы при симметричной нагрузке трехфазного синхронного генератора; это позволяет рассматривать лишь одну фазу, так как явления во всех фазах аналогичны, но протекают с соответствующим сдвигом во времени.
Распространенным способом отображения векторных диаграмм является их построение в соответствии с уравнениями равновесия напряжений (эдс). Это справедливо и для синхронных машин, и для трансформаторов и для асинхронных машин [4, 10].
6.1. Явнополюсная машина. Напряжение фазы обмотки генератора U равно эдс Е0, индуцируемой магнитным потоком возбуждения Фв, минус падение напряжения в индуктивных сопротивлениях реакции якоря Xad и Хаq, индуктивном сопротивлении рассеяния якоря Хσа и в активном сопротивлении якоря Rа.
В соответствии с этим записывается уравнение напряжения |
явнополюсного |
синхронного генератора: |
|
Ú = É0 – jXadÍd – jXaqÍq – jXσаÍa – RаÍa = É – jXσаÍa – RаÍa, |
(1.10) |
где É = É0 – jXaqÍq – jXadÍd – эдс в фазе обмотки якоря от результирующего потока в зазоре Ф .
При исследовании режимов работы синхронной машины в энергетических системах обычно пользуются диаграммой, построенной в соответствии со следующим форматом представления уравнения (1.10):
É0 = Ú + RаÍa + jXσаÍa + jXaqÍq + jXadÍd = Ú+ RаÍa + jXqÍq + jXdÍd, |
(1.11) |
где Xd = Xσа + Xad; Xq = Xσа + Xaq – сопротивления фазы обмотки якоря явнополюсной машины в установившемся режиме, их физическая природа рассмотрена в Работе № 2, разд. 3.1, с. 80.
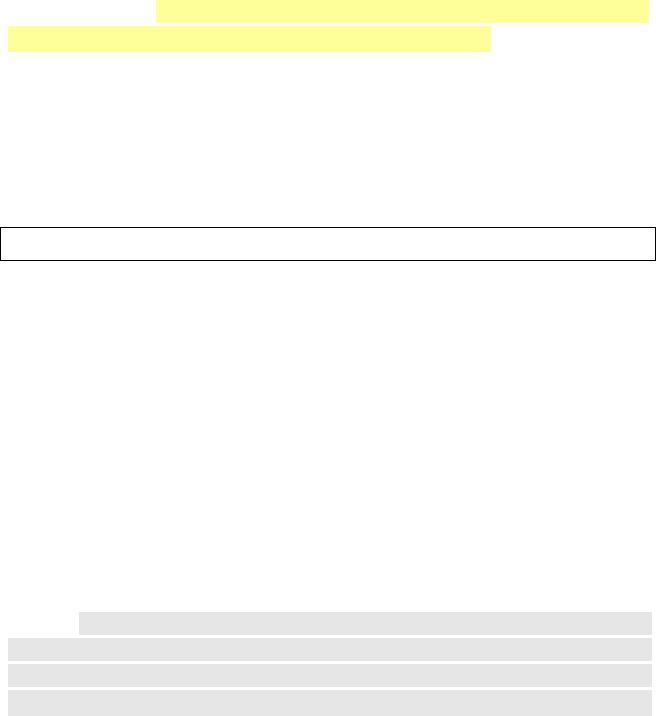
Векторная диаграмма, соответствующая уравнению (1.11), представлена на рис. 1.6а. Эта диаграмма и уравнение (1.11) читаются так: эдс Е0, индуцируемая
магнитным потоком возбуждения Фв, равна напряжению U на зажимах обмотки якоря генератора плюс падение напряжения на сопротивлениях обмотки якоря.
54
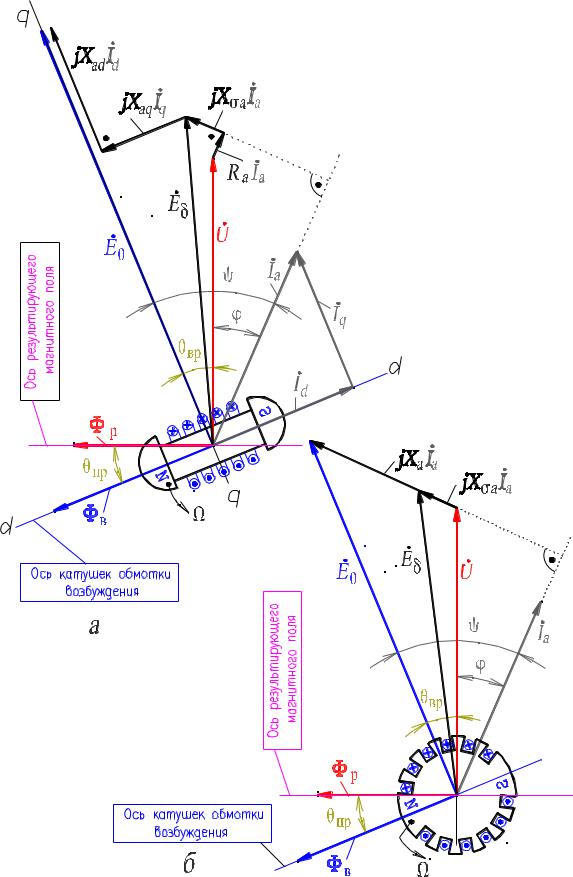
Рис. 1.6. Векторная диаграмма напряжений синхронного генератора: явнополюсного (а), неявнополюсного (б)
55
В случае, показанном на рис. 1.6а, генератор имеет смешанную активноиндуктивную нагрузку, когда угол сдвига фаз φ между током обмотки якоря Ia и напряжением U больше нуля, φ > 0. Кроме того, ψ > 0, Id > 0 и продольная реакция якоря является размагничивающей.
Угол между временными векторами É0 и Ú называется углом нагрузки (времен- ным) и обозначается символом θвр (термин 45, с. 16). В генераторном режиме работы (рис. 1.6) эдс É0 всегда опережает Ú и угол θвр при этом считается положительным. Название этого угла происходит оттого, что значение θвр зависит от нагрузки генератора:
P = mUIа cos φ, |
(1.12) |
где P – активная мощность генератора; m = 3 – число фаз обмотки якоря.
Действительно, из диаграммы рис. 1.6а видно, что, например, при U = const, Iа = const и при уменьшении абсолютной величины φ составляющая тока якоря Iq увеличивается, соответственно чему увеличиваются также Éаq = –jXaqÍq и θвр.
Угол θ имеет не только временнóе, но и пространственное толкование. Как видно из диаграмм рис. 1.6, пространственный угол θпр – это угол между пространственными векторами поля возбуждения Фв и результирующего поля Фр (термин 45, с. 16). Заметим, что вектор Фв совпадает с осью d, а также с осью катушек обмотки возбуждения. Если число пар полюсов машины р = 1, то временнóй и пространственный углы равны, θвр = θпр. Если р > 1, то θвр = pθпр.
6.2. Неявнополюсная машина. В этом случае Xad = Xaq и Xd = Xq = Xс, поэто-
му нет необходимости раскладывать ток якоря Ia на составляющие Id и Iq. Уравнение (1.10) для неявнополюсной машины записывается в виде:
É0 = Ú + RаÍa + jXσаÍа + jXаÍа = Ú + RаÍa + jXсÍа, |
(1.13) |
где Xс = Xσа + Xa – сопротивление фазы обмотки якоря неявнополюсной машины в установившемся режиме, его физическая природа рассмотрена в Работе
№ 2, разд. 3.1, с. 80.
Уравнению (1.13) соответствует диаграмма, представленная на рис. 1.6б.
Векторные диаграммы рис. 1.6 справедливы для любого установившегося режима работы генератора, если в каждом случае пользоваться значениями параметров Xad, Xaq или Xd, Xq, соответствующими реальному состоянию насыщения магнитной цепи в рассматриваемом режиме работы.
56

7.Характеристики синхронного генератора, работающего на автономную сеть
Электрические и магнитные свойства синхронных генераторов отображаются их характеристиками, представляемыми в форме зависимости между двумя величинами, обусловливающими определенные стороны рабочего процесса машины.
7.1. Классификация характеристик. Работа генератора, работающего на автономную сеть, анализируется на основе пяти характеристик (табл. 1.2)
Таблица 1.2. Классификация характеристик
|
№ |
|
Наименование |
|
Обозначение |
|
Параметр |
|
пп |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
Характеристика холостого хода |
|
E0 = f(Iв) |
|
Ia = 0 |
|
|
|
|
|
|
|
|
2 |
|
Характеристика короткого замыкания |
|
Ia = f(Iв) |
|
U = 0 |
|
|
3 |
|
Нагрузочная индукционная характеристика |
|
U = f(Iв) |
|
Ia = const |
|
|
|
|
|
|
|
|
4 |
|
Внешняя характеристика |
|
U = f(Ia) |
|
Iв = const |
|
|
5 |
|
Регулировочная характеристика |
|
Iв = f(Ia) |
|
U = const |
|
|
|
|
|
|
|
|
Примечание. Все характеристики снимают при постоянных значениях скорости вращения ротора n = const и частоте f = const. При снятии характеристик 3, 4 и 5 поддерживается также постоянным значение коэффициента мощности, cos = const.
Для сопоставления свойств машин с различными номинальными данными принято представлять характеристики в относительных единицах (разд. 5, с. 24; прил., с. 112). Они дают наглядное представление о ряде основных свойств генераторов. В приложении (с. 193) приведена Паскаль-программа “Расчет экспериментальных значений величин в системе относительных единиц”.
7.2. Характеристика холостого хода (термин 32, с. 14) по своему виду опреде-
ляется магнитными свойствами машины. В некотором масштабе она повторяет магнитную характеристику (термин 31, с. 14). В связи с явлением гистерезиса характеристика х.х. имеет форму петли. Практически за характеристику х.х. принимают среднюю линию петли (рис. 1.7). Остаточная эдс Er, имеющая место в обмотке якоря при нулевом значении тока возбуждения, Iв = 0, обусловлена потоком остаточного магнетизма сердечников полюсов индуктора.
Характеристика х.х. многократно используется при анализе генератора (разд. 7.6, 7.7, 7.8 с. 61, сл.). Наряду с реальной криволинейной характеристикой х.х. рассматриваются также спрямленные характеристики х.х (рис. 1.7).
57
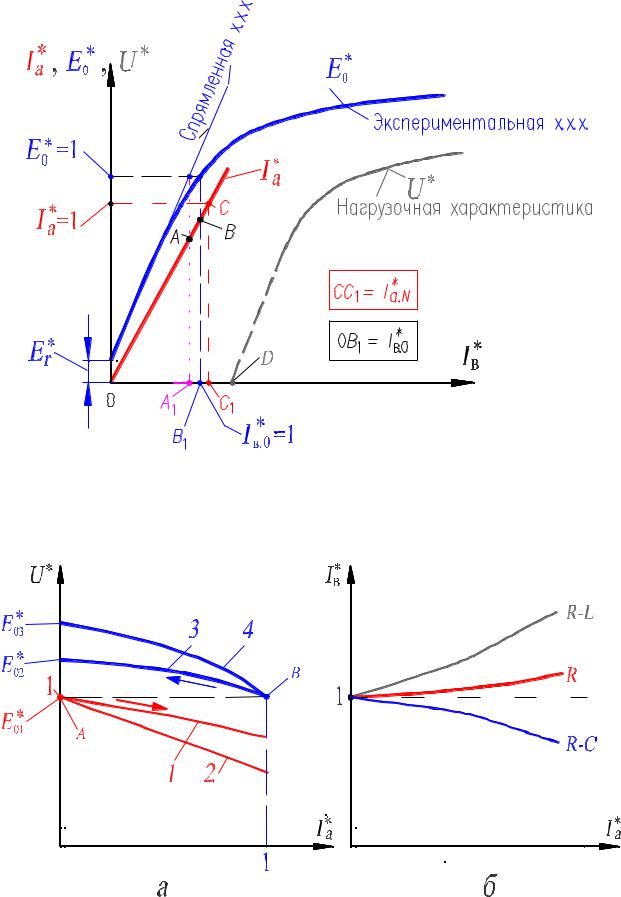
Рис. 1.7. Характеристики синхронного генератора: холостого хода |
E* f (I* ) |
, |
||
|
0 |
B |
||
нагрузочнаяиндукционная U * f (IB* ) иустановившегосятрехфазногок.з. |
|
Ia* f (IB* ) |
||
Рис. 1.8. Характеристики синхронного генератора: |
|
|
|
|
внешние (а), регулировочные (б) |
|
|
|
|
58 |
|
|
|
|
Характеристику холостого хода отдельной машины принято сопоставлять c
нормальной характеристикой холостого хода, являющейся усредненной по данным большого количества реальных характеристик генераторов. В табл. 1.3 приведены нормальные характеристики холостого хода турбогенератора и гидрогенератора, представленные в относительных единицах.
Таблица 1.3. Нормальные характеристики холостого хода
Iв |
* |
0,5 |
1,0 |
1,5 |
2,0 |
2,5 |
3,0 |
3,5 |
|
|
|
|
|
|
|
|
E0* Турбогенератор |
0,58 |
1,00 |
1,21 |
1,33 |
1,40 |
1,46 |
1,51 |
Гидрогенератор |
0,53 |
1,00 |
1,23 |
1,30 |
– |
– |
– |
Характеристика холостого хода отдельной машины не должна заметно отличаться от нормальной характеристики.
7.3. Нагрузочная характеристика отражает связь между напряжением генератора и током возбуждения U = f(Iв) при постоянной величине тока нагрузки Iа = const, cos φ = const и постоянной частоте вращения n = const. Практическое значение имеет нагрузочная характеристика, снятая при индуктивной нагрузке. При подключении нагрузки к обмотке якоря генератора ток Iа, протекающий в этой обмотке, создает свой магнитный поток Фa. Воздействие магнитодвижущей силы обмотки якоря Fa на магнитное поле Фв генератора, создаваемое обмоткой возбуждения, называется реакцией якоря (термин 17, с. 12). Влияние реакции якоря зависит от характера нагрузки (см. с. 49…53).
Нагрузочная индукционная характеристика U = f(Iв) располагается ниже характеристики холостого хода (рис. 1.7) вследствие двух причин: 1) падение напряжения, 2) размагничивающее действие реакии якоря при индуктивной нагрузке (разд. 5.6, с. 49). В точке D напряжение обмотки якоря равно нулю, эта точка соответствует трехфазному короткому замыканию генератора.
Располагая характеристиками холостого хода и индукционной нагрузочной, снятой при токе Iа = IN, можно определить индуктивное сопротивление рассея-
ния обмотки якоря X * a и величину магнитодвижущей силы продольной реакции якоря Fаd в масштабе тока возбуждения.
7.4. Внешняя характеристика отражает зависимость напряжения на нагрузке от тока в ней U = f(Iа) при постоянных значениях cos φ, Iв и n. Внешняя характеристика определяется выражением (1.10). Величина изменения напряжения
59