

Последнее выражение перепишем в виде
![]() (25)
(25)
Лекция 13
Тема 3.1 Термонапряжения при индукционном нагреве. Постановка задачи. Алгоритм решения мкэ
Среди различных численных методов решения механических задач (МКГ, МКР) в данном случае выбор делается в пользу метода конечных элементов, поскольку он выгодно отличается от остальных.
Расчет электродинамических усилий, перемещений и концентрации напряжений в элементах конструкций сводится к определению компонентов векторов перемещений точек тела
![]() ,
(1)
,
(1)
деформаций
![]() (2)
(2)
и напряжений
![]() ,
(3)
,
(3)
где символ «Т» означает операцию транспонирования матриц. Все эти неизвестные являются функциями координат точек тела.
Отметим, что представление напряжений и деформаций (как и некоторой совокупности скалярных величин) в виде многомерных векторов, составленных из компонентов тензоров – удобный прием вычислительной математики, позволяющий использовать аппарат матричной алгебры. По существу, конечно, оно не имеет физического обоснования и справедливо только при неизменной системе координат, поскольку компоненты напряжений и деформаций образуют тензоры.
В статической задаче компоненты вектора напряжений должны удовлетворять уравнениям равновесия
![]()
![]() (4)
(4)
![]()
где
![]() ,
,![]() ,
,![]() –
компоненты вектора массовых сил. Три
других уравнения равновесия в виде сумм
моментов внутренних сил относительно
координатных осей приводят к известным
условиям парности касательных напряжений
–
компоненты вектора массовых сил. Три
других уравнения равновесия в виде сумм
моментов внутренних сил относительно
координатных осей приводят к известным
условиям парности касательных напряжений![]() .
.
Для точек, лежащих
на поверхности
![]() тела,
компоненты напряжений должны обеспечивать
выполнение краевых условий
тела,
компоненты напряжений должны обеспечивать
выполнение краевых условий
![]()
![]() ,
(5)
,
(5)
![]()
где
![]() ,
,![]() ,
,![]() – компоненты вектора внешних поверхностных
нагрузок;l,
m,
n
- направляющие косинусы единичной
нормали к поверхности тела.
– компоненты вектора внешних поверхностных
нагрузок;l,
m,
n
- направляющие косинусы единичной
нормали к поверхности тела.
Компоненты
![]() вектора перемещений однозначно связаны
с компонентами вектора деформаций
соотношениями Коши:
вектора перемещений однозначно связаны
с компонентами вектора деформаций
соотношениями Коши:
![]() ,
,
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
(6)
.
(6)
Эти уравнения,
справедливые для малых деформаций,
выражают условия сплошности тела. На
той части
![]() поверхности
тела, где заданы перемещения, функции
удовлетворяют кинематическим граничным
условиям вида
поверхности
тела, где заданы перемещения, функции
удовлетворяют кинематическим граничным
условиям вида
![]() (7)
(7)
где
![]() –
известные функции координат. Заметим,
что поверхности
–
известные функции координат. Заметим,
что поверхности
![]() и
и
![]() должны
образовывать полную поверхность(S)
тела, то есть
должны
образовывать полную поверхность(S)
тела, то есть
![]() .
.
Замкнутая система
уравнений краевой задачи получается
из уравнений (4)-(7), дополненных физическими
уравнениями, связывающими векторы
напряжений
![]() и
деформаций
и
деформаций![]() .
Последние строятся на основе физических
и математических моделей конструкционных
материалов.
.
Последние строятся на основе физических
и математических моделей конструкционных
материалов.
Интегральную формулировку задачи можно получить, например, на основе принципа возможных перемещений, согласно которому в состоянии равновесия работа всех внешних и внутренних сил на соответствующих им возможных перемещениях равна нулю:
![]() ,
(8)
,
(8)
где первое слагаемое
представляет собой вариацию
![]() потенциальной энергии деформации,
второе – работу
потенциальной энергии деформации,
второе – работу![]() внешних поверхностных и объемных сил,
то есть
внешних поверхностных и объемных сил,
то есть
![]()
![]() .
(9)
.
(9)
Выполнение принципа возможных перемещений равносильно выполнению дифференциальных уравнений равновесия (4), а также краевых условий (5) и (7). Уравнения сплошности в форме (6) предполагаются выполненными. Остается дополнить уравнение (8) физическими уравнениями.
Непосредственно из принципа возможных перемещений можно получить вариационный принцип Лагранжа в виде
![]() ,
(10)
,
(10)
где Э
– полная потенциальная энергия тела,
определяемая как разность между работой
внутренних
![]() и внешних
и внешних![]() сил.
сил.
В осесимметричной задаче данной теории рассматривается тело вращения (рис. 1), внешние нагрузки на котором (а также температура) симметричны относительно его оси.

Рис. .1 Тело вращения с внешними нагрузками, симметричными относительно его оси
При этом перемещения, деформации и напряжения также симметричны относительно оси и являются функциями двух координат. Векторы деформаций и напряжений в осесимметричной задаче имеют вид
![]() ,
(11)
,
(11)
![]() ,
(12)
,
(12)
где верхний индекс «Т» означает операцию транспонирования.
Соотношения Коши записываются в форме
![]() ,
(13)
,
(13)
где u, w – компоненты перемещений, r – текущий радиус.
Для изотропного материала уравнения упругости принимаются в виде
![]() ,
(14)
,
(14)
где матрица упругости
 ;
(15)
;
(15)
вектор дополнительных деформаций
![]() .
(16)
.
(16)
Если эти деформации температурные, то
![]() . (17)
. (17)
В соотношениях
(15)-(17): Е,
![]() -
упругие постоянные материала;
-
упругие постоянные материала;![]() - коэффициент линейного температурного
расширения;
- коэффициент линейного температурного
расширения;![]() -
перепад температур.
-
перепад температур.
Для некоторого осесимметричного конечного элемента с вершинами i, j, m (рисунок) вектор искомых узловых перемещений имеет следующую структуру
![]() ,
(18)
,
(18)
а перемещения точек внутри элемента представляются в виде:
 ,
(19)
,
(19)
где матрица
![]() функций формы элементов:
функций формы элементов:

![]() и т.д., (20)
и т.д., (20)
где
![]() –
площадь элемента, а коэффициенты
–
площадь элемента, а коэффициенты![]() ,
,![]() ,
,![]() и другие (
и другие (![]() )определяются
с помощью зависимостей типа
)определяются
с помощью зависимостей типа
![]() .
(21)
.
(21)
Вектор деформаций выражается через вектор узловых перемещений с помощью зависимости
![]() ,
(22)
,
(22)
в которой матрица
градиентов
![]() ,
как и в плоской задаче, состоит из трех
блоков
,
как и в плоской задаче, состоит из трех
блоков
![]() ,
(23)
,
(23)
каждый из которых имеет структуру типа
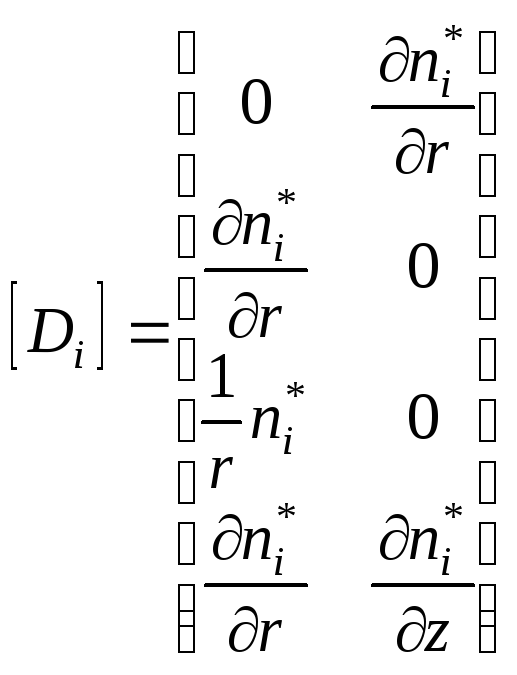 ,
,
![]() .
(24)
.
(24)
Однако, в отличие
от плоской задачи, здесь
![]() зависит
от координатыr,
следовательно, деформации внутри
конечного элемента в общем случае не
будут постоянными.
зависит
от координатыr,
следовательно, деформации внутри
конечного элемента в общем случае не
будут постоянными.
Теперь с помощью соотношения (23) выразим напряжения (14) в конечном элементе через узловые перемещения.
Получим
![]() .
(25)
.
(25)
Система разрешающих уравнений МКЭ для осесимметричной задачи имеет тот же вид, что и для объемной, то есть
![]() ,
(26)
,
(26)
где матрица жесткости в конструкции в целом описывается как
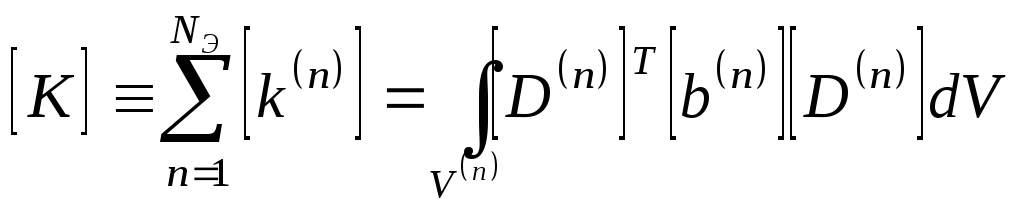 ;
(27)
;
(27)
![]() - число элементов;
- число элементов;
![]() - объем элемента.
- объем элемента.
Вектор узловых сил, как и в плоской задаче, получается суммированием по всем элементам:
![]() ,
(28)
,
(28)
то есть векторов
узловых сил, эквивалентных внешним
объемным
![]() и поверхностным
и поверхностным![]() нагрузкам, а также дополнительным
деформациям
нагрузкам, а также дополнительным
деформациям![]() .
.
Эти векторы, отнесенные к конечным элементам (n = 1, 2,…, NЭ), находятся из следующих соотношений:
![]() ,
(29)
,
(29)
![]() ,
(30)
,
(30)
![]() ,
(31)
,
(31)
где матрицы распределенных объемных и поверхностных нагрузок имеют соответственно следующую структуру:
![]() ;
;
![]() .
(32)
.
(32)
В осесимметричной задаче, как и в плоской, матрица жесткости конечного элемента имеет вид
![]() .
(33)
.
(33)
Однако матрица
градиентов
![]() в
данном случае зависит от координат, что
осложняет интегрирование уравнения
(33). В практических расчетах рассматриваемый
интеграл можно вычислить приближенно,
определив матрицы
в
данном случае зависит от координат, что
осложняет интегрирование уравнения
(33). В практических расчетах рассматриваемый
интеграл можно вычислить приближенно,
определив матрицы![]() и
и![]() для
центра тяжести конечного элемента с
координатами
для
центра тяжести конечного элемента с
координатами
![]() ,
,
![]() .
(34)
.
(34)
С учетом этого, а
также соотношения
![]() ,
из (30) найдем
,
из (30) найдем
![]()
![]() .
(35)
.
(35)
Аналогичным образом могут быть найдены и приближенные значения векторов узловых сил (26)-(28). Опыт показывает, что при достаточно мелкой сетке конечных элементов рассмотренный прием обеспечивает приемлемую точность вычислений. Отметим, что точный расчет интегралов (26)-(30) уравнений может быть выполнен с помощью L-координат.