

III.Закон сохранения импульса.
Согласно второго закона Ньютона:
F = ma, т.к.
![]() ,
получим:
,
получим:
![]() или
или
![]()
Вектор
![]() называетсяимпульсномиликоличеством
движения тела(имеет направление
скорости).
называетсяимпульсномиликоличеством
движения тела(имеет направление
скорости).
Вектор Fdtназываютимпульсом силы(имеет направление силы).
|
Второй закон динамики |
Изменение импульса тела равно импульсу действующей на него силы. |
Рассмотрим замкнутую (изолированную) систему тел, т.е. действие внешних сил практически равно нулю. В этой системе взаимодействуют две материальные точки.
|
По второму закону: |
|
|
По третьему закону: |
F21 = –F21 |
|
Тогда: |
|
Если система состоит из nматериальных точек, то:
![]()
Вектор
![]() – называетсявектор импульса системы.
– называетсявектор импульса системы.
Запишем: ![]()
В замкнутой системе: ![]() тогда
тогда
![]() или
или
![]()
|
Закон сохранения импульса |
Полный вектор импульса замкнутой системы тел с течением времени не изменяется. |
Закон сохранения импульса соблюдается для любой изолированной системы.
IV.Относительное движение.
Инерциальные системы.Механический принцип относительности.
Системы отсчета можно связать как с неподвижными телами отсчета, так и с движущимися.
|
Вопрос: |
Будут ли законы динамики справедливы в обеих системах отсчета? Какие поправки (к скорости и ускорению) нужны, чтобы законы были справедливы? |
|
Пример: |
по палубе равномерно и прямолинейно движущегося относительно берега корабля перемещается известным образом тело. Различно ли и как его движение относительно палубы и берега? |
Система отсчета, связанная с палубой – подвижная.
Система отсчета, связанная с берегом – неподвижная.
Движение тела в подвижной системе – относительное движение.
Движение тела в неподвижной системе – абсолютное движение.
Движение тела относительно неподвижной системы отсчета, которым оно обладало бы, будучи жестко связанное одной из точек подвижной, называется переносным движением.
|
|
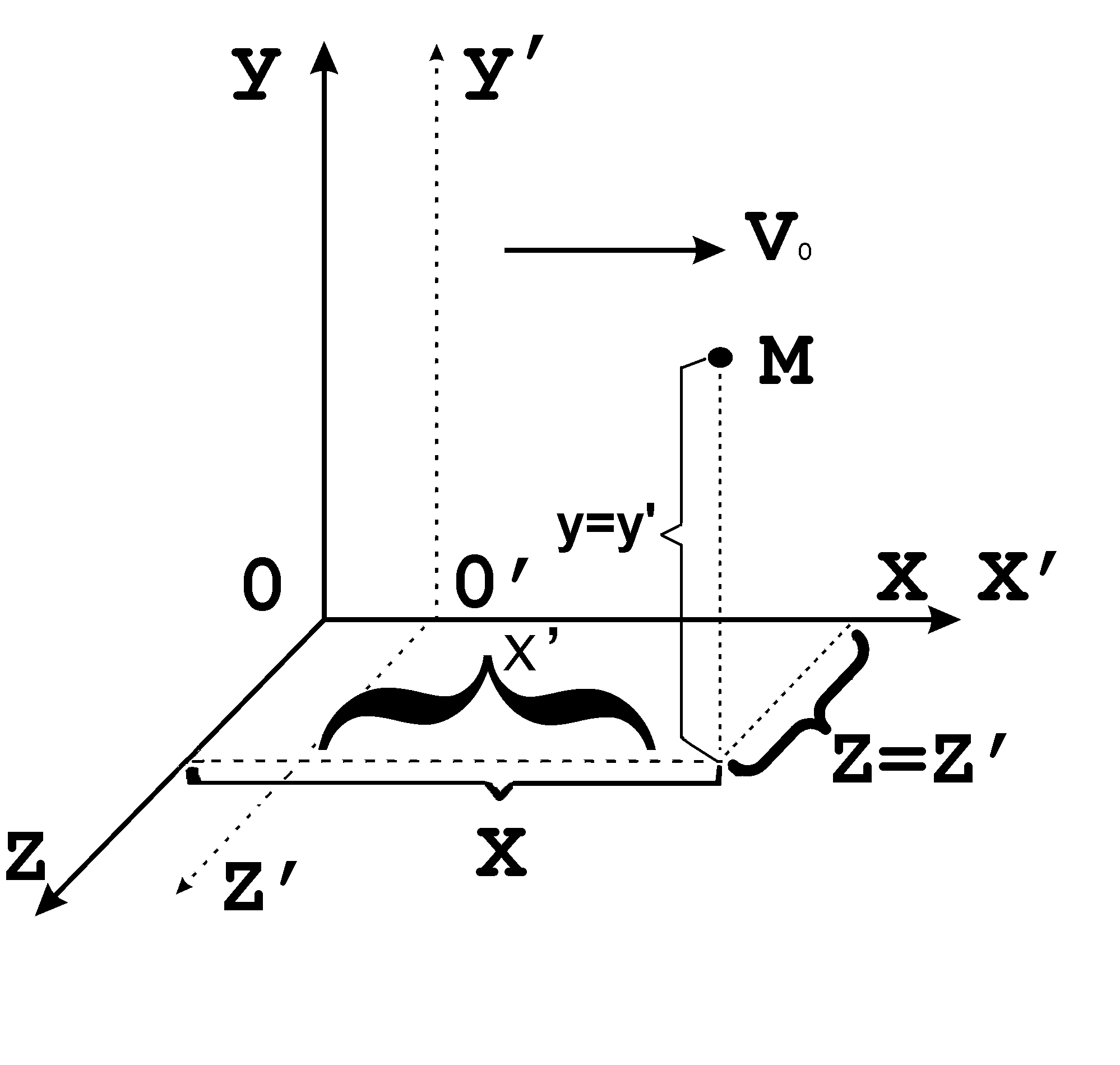
Имеем две системы: |
|
a)
неподвижнуюXYZ подвижнуюX’Y’Z’ | |
|
б) X’Y’Z’ перемещается относительноXYZпрямолинейно соv0вдоль оси х. | |
|
в) в начальный момент t= 0 оси обеих систем совпадали. | |
|
г) точка М имеет координаты как в подвижной так и в неподвижной системах |
Преобразования ГАЛИЛЕЯ 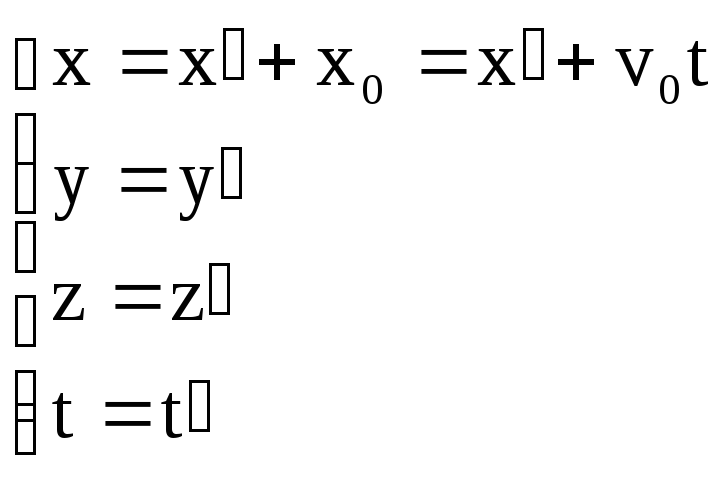
Зная, что
![]() и
и![]() имеем
имеем
![]() (4)
(4)
![]() (5)
(5)
Уравнения (4 и 5) в векторной записи в общем случае:
![]() (6)
(6)
![]() (7)
(7)
Из уравнения (7) следует, что ускорение одного и того же тела в каждый момент времени одинаково во всех системах отсчета, движущихся относительно друг друга равномерно и прямолинейно.
Системы отсчета движущиеся относительно неподвижной равномерно и прямолинейно называются инерциальными.
Следовательно, инерциальные системы отсчета образуют замкнутую систему. Инерциальные системы – это абстракция, но практически с большой степенью точности можно считать инерциальной системой отсчета, связанную с центром масс Солнечной системы (гелиоцентрическая). В некоторых задачах за инерциальные могут быть приняты системы, связанные с Землей или телами, движущимися, движущимися относительно Земли равномерно и прямолинейно.
Равенство (7) выражает механический принцип относительности.
|
Принцип относительности Галилея |
Никаким механическими опытами, произведенными внутри инерциальной системы отсчета, нельзя установить, находится ли она в покое или движется равномерно и прямолинейно. |
Уравнения динамики не изменяются при переходе от одной инерциальной системы отсчета к другой.
|
Пример: |
чтобы прыгнуть на расстояние 1 метр в направлении кормы корабля или носа при равномерном и прямолинейном его движении, нужно усилие, равное усилию при прыжке на покоящемся корабле. |
Следовательно, при описании движения в неинерциальных системах отсчетаможно пользоваться уравнениями динамики, справедливыми только для инерциальных систем, если наряду с силами, обусловленными воздействием тел друг на друга, учитывать силы инерции:
![]()
Пример:
|
|
Когда тележка стоит или движется равномерно и прямолинейно P=Nи шарик неподвижен относительно тележки. |
|
|
Когда
тележка движется с ускорением
Так
как шарик снова неподвижен, то
|


Введение сил инерции дает возможность описывать движение тел в любых системах отсчета.
Силы инерции не являются силами воздействия (упругие, гравитационные, трения), они обусловлены свойствами той системы отсчета, в которой рассматриваются механические явления. Силы инерции – фиктивные силы.