

11. Установка начального времени выполнения упражнения.
11.1. Выполнить действия описанные в пункте 1.1 — 1.5.
11.2. В окне программы Manager.exeнавести курсор мышки на строку с названием ситуации “Razhod” в списке ситуацийActiveTasksрис.2.7.13. Нажать ЛКМ.
11.3. Удерживая курсор мышки на строке с названием ситуации “ForManager” нажать правую кнопку мышки (ПКМ).
11.4. В меню рис.2.7.26, курсор мышки навести на опцию “Properties”, нажать ЛКМ.

рис.2.7.26
11.5. В меню “TaskProperties: 1 –Razhod” рис.2.7.27. навести курсор мышки на цифру 10 которая находится в поле “Dateandtime:” рис.2.7.28. Нажать ЛКМ. Цифра 10 имеет синий фон.
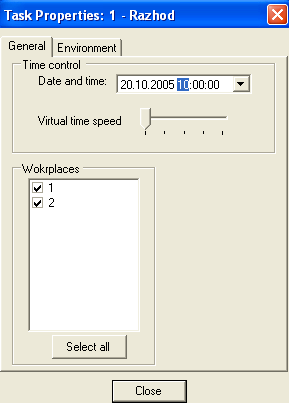
рис.2.7.27
![]()
рис.2.7.28
11.6. Ввести при помощи клавиатуры цифру 12, нажать Enterна клавиатуре.
11.7. Навести курсор мышки на Closeв меню“Task Properties: 1 – Razhod” нажать ЛКМ.
11.8. В списке ситуаций ActiveTasks, в колонкеTimeотображается информация о начальном времени старта ситуации “Razhod”, 12:00:00. Таким образом установка начального времени выполнения для упражнения “Razhod” осуществлена.
Изменения течения времени в сторону его увеличения в 2, 3, 4, 5 раз.
Выполнить действия описанные в пунктах 11.1 — 11.4.
12.2. Навести курсор мышки на ползунок
![]() который находится в строке “Virtualtimespeed”,
которая находится в меню “TaskProperties: 1 –Razhod”
рис.2.7.27. Нажать ЛКМ и удерживая ЛКМ
переместить курсор мышки напротив
второй черточки которая находится под
ползунком, рис.2.7.29. Навести курсор мышки
наCloseв меню “TaskProperties: 1 –Razhod” нажать ЛКМ.
который находится в строке “Virtualtimespeed”,
которая находится в меню “TaskProperties: 1 –Razhod”
рис.2.7.27. Нажать ЛКМ и удерживая ЛКМ
переместить курсор мышки напротив
второй черточки которая находится под
ползунком, рис.2.7.29. Навести курсор мышки
наCloseв меню “TaskProperties: 1 –Razhod” нажать ЛКМ.
![]()
рис.2.7.29
Течение времени в ситуации Razhodначнет идти в два раза быстрее. В колонкеTime, в окне программыManager.exe, в списке “ActiveTask”, напротив ситуацииRazhodсчет времени идет в два раза быстрее относительно земного времени.
Для увеличения течения времени в ситуации ForManagerв 3,4,5 раз, повторить действия описанные в пунктах 2.7.12.2. — 2.7.12.3, перемещая ползунок к третий, четвертой, пятой черточки соответственно увеличивая скорость течения времени в ситуацииRazhodв три, четыре, пять раз
Отображение информации судов: скорость в узлах относительно воды, скорость в узлах относительно дна, курс в градусах, глубина под килем в метрах, мощность работы для каждого двигателя в процентах от полной мощности, значение перекладки руля в градусах.
13.1. Повторить действия описанные в пунктах 1.1. — 1.6.
13.2. В окне программы Manager.exeнавести указатель мышки, на строку с типом суднаMuromкоторая находится в списке судовShipsк ситуацииRazhod. Нажать ЛКМ. Строка выделится синим цветом, рис.2.7.30.
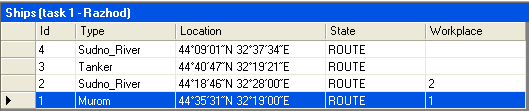
рис.2.7.30
Нажать ПКМ.
В меню рис.2.7.31. навести указатель мышки на опцию “RunMiniControl”. Нажать ЛКМ.
рис.2.7.31
Выполнить действия описанные в пунктах 2.7.13.1. — 2.7.13.3.
В меню рис.2.7.31. навести указатель мышки на опцию “Properties”. Нажать ЛКМ.
В окне меню “ShipProperties:Murom– 1”, рис.2.7.32 отображается значение скорости в узлах относительно воды в поле “Velocity/W:” рис.2.7.33., в поле “Velocity/G:” отображается значение скорости в узлах относительно земли рис.2.7.34., в поле “Orientation:” отображается значение курса в градусах рис.2.7.35., в поле “Depth:” отображается значение глубины под килем в метрах рис.2.7.36., в колонке “Porteng:” в строке “Effective” отображается значение мощности работы двигателя в процентах от полной мощности рис.2.7.37., в колонке “Rudder:” в строке “Effective” отображается значение угла перекладки руля в градусах рис.2.7.37.
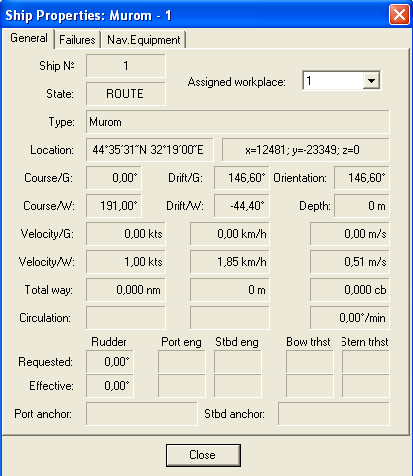
рис.2.7.32
![]()
рис.2.7.33
![]()
рис.2.7.34
![]()
рис.2.7.35
![]()
рис.2.7.36
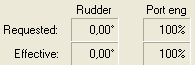
рис.2.7.37
В окне программы “MiniControl” рис.2.7.38 навести указатель мышки на ползунок
 который находится на шкале “Rudder:”
рис.2.7.39. Нажать ЛКМ. Удерживая ЛКМ
переместить указатель мышки в значение
ползунка “+35” рис.2.7.40.
который находится на шкале “Rudder:”
рис.2.7.39. Нажать ЛКМ. Удерживая ЛКМ
переместить указатель мышки в значение
ползунка “+35” рис.2.7.40.
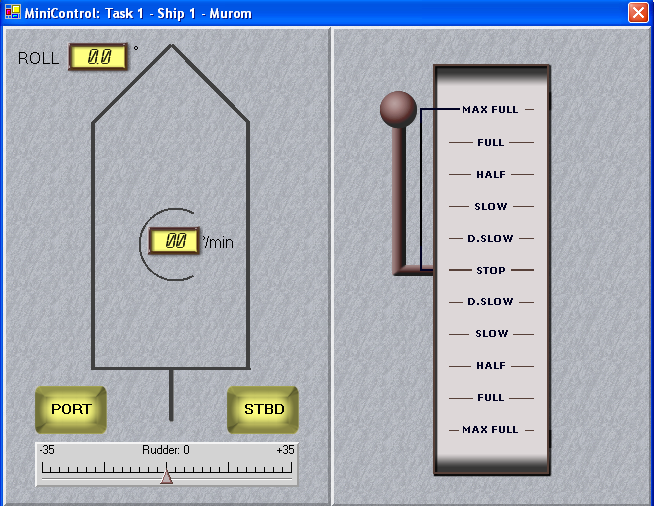
рис.2.7.38
![]()
рис.2.7.39
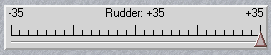
рис.2.7.40
13.9. В окне меню “ShipProperties:Murom– 1”, рис.2.7.32 в колонке “Rudder:” в строке “Effective” отображается значение угла перекладки руля в градусах рис.2.7.41.
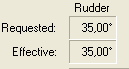
рис.2.7.41
Установка во время выполнения ситуации направления и скорость ветра, направление и скорость течения для ситуации.
14.1. Выполнить действия описанные в пункте 2.7.11.1. — 2.7.11.4.
14.2. В меню “TaskProperties: 1 –Razhod” рис.2.7.27. навести курсор мышки на закладку “Environment”, нажать ЛКМ.
14.3. В меню “TaskProperties: 1 –Razhod” рис.2.7.42., переместить курсор мышки в первое поле напротив словаCurrentи нажать ЛКМ. При помощи клавиатуры ввести значение направления течения 90. Нажать кнопкуEnterна клавиатуре.
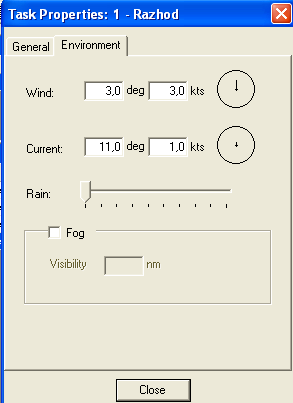
рис.2.7.42
В меню “TaskProperties: 1 –Razhod” рис. 2.7.42, переместить курсор мышки во второе поле напротив словаCurrentи нажать ЛКМ. При помощи клавиатуры ввести значение скорости течения 2. Нажать кнопкуEnterна клавиатуре.
В меню “TaskProperties: 1 –Razhod” рис. 2.7.42., переместить курсор мышки в первое поле напротив словаWindи нажать ЛКМ. При помощи клавиатуры ввести значение направления течения 165. Нажать кнопкуEnterна клавиатуре.
меню “TaskProperties: 1 –Razhod” рис. 2.7.42., переместить курсор мышки во второе поле напротив словаWindи нажать ЛКМ. При помощи клавиатуры ввести значение скорости течения 5. Нажать кнопкуEnterна клавиатуре.
В меню “TaskProperties: 1 –Razhod” рис. 2.7.43., переместить курсор мышки на кнопку “Close” нажать ЛКМ.
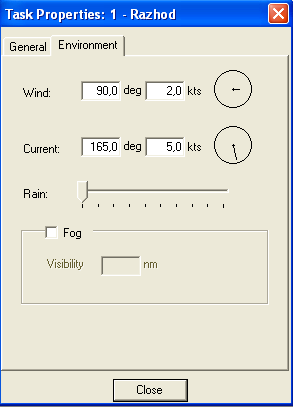
рис. 2.7.43
Включения тумана и установки его интенсивности во время выполнения ситуации .
15.1. Повторить действия описанные в пункте 2.7.14.1 — 2.7.14.2.
15.2. Навести курсор мышки на квадратик
![]() перед словом “Fog”, в меню
“TaskProperties:
1 –Razhod”, нажать ЛКМ.
перед словом “Fog”, в меню
“TaskProperties:
1 –Razhod”, нажать ЛКМ.
15.3. Навести курсор мышки на поле перед словом “Visibility”, меню “TaskProperties: 1 –Razhod”, нажать ЛКМ. При помощи клавиатуры ввести значение 0.5, тем самым установив интенсивность тумана, рис.2.7.44.
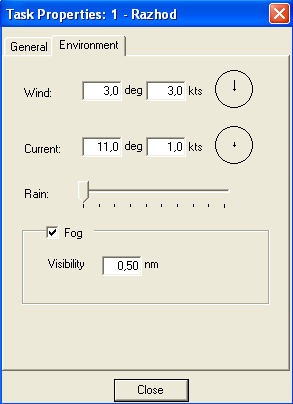
рис.2.7.44
15.4. В меню “TaskProperties: 1 –Razhod” рис.2.7.44., переместить курсор мышки на кнопку “Close” нажать ЛКМ.
15.5. Для выключения тумана надо, навести
курсор мышки на квадратик
![]() перед словом “Fog”, в меню
“TaskProperties:
1 –Razhod”, нажать ЛКМ.
перед словом “Fog”, в меню
“TaskProperties:
1 –Razhod”, нажать ЛКМ.
Вызов ПО РЛС/САРП судна участвующего в выполняемой ситуации с места инструктора.
16.1. Выполнить действия описанные в пунктах 2.7.13.1. — 2.7.13.3.
16.2. В меню рис.2.7.45. навести указатель мышки на опцию “Runradar”. Нажать ЛКМ.
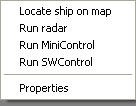
рис.2.7.45
16.3. Для судна типа Muromзагрузится ПО РЛС/САРП, рис.2.7.46.
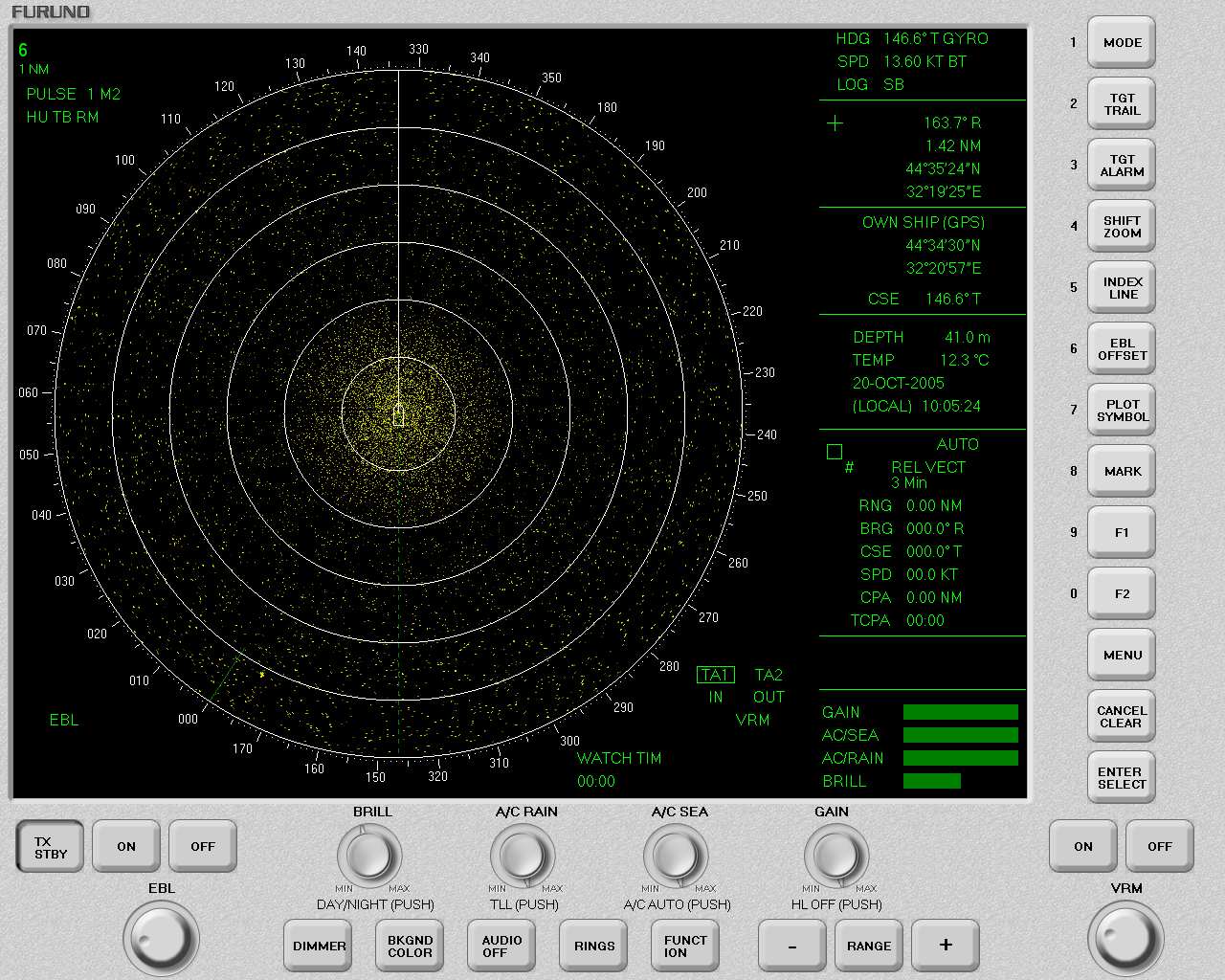
рис.2.7.46
16.4.Для закрытия ПО РЛС/САРП надо нажать на клавиатуре сочетание клавишAlt-F4.