

GOS_otkorrektirovannyy234
.pdf
|
|
|
|
|
|
|
|
|
|
|
∑ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
СКП = |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
i = X i − X ср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
X ср = |
∑ X i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
OF = |
|
|
|
|
Μ − погрешность места судна |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
g = |
|
|
|
U |
= |
dU |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
dP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
P → 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
OAF : |
|
2M |
= OA 2 + AF2 − 2OA AFcos τ |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
OA = |
|
|
1 |
sin |
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
OB = AF = |
2 |
sin |
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2M = |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
− 2 |
|
|
|
|
|
|
|
|
|
cos τ |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
1 |
|
|
|
+ |
|
|
|
|
2 |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
sin 2 τ |
|
|
sin 2 |
|
|
sin 2 |
|
τ |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||
∑ M |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
∑ |
1 |
2 |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
= |
|
|
|
|
|
|
1 |
+ |
|
|
2 |
|
− |
|
|
|
cos |
|
τ |
|
|
|
||||||||||||||||||||||||||||
n |
|
|
|
|
|
sin |
|
|
|
|
|
τ |
|
n |
|
n |
|
|
|
n |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
M = |
|
|
|
|
|
|
|
|
|
(m ЛП2 |
1 + m ЛП2 |
2 − 2rmЛП1m ЛП2 cos τ ) |
|
|
||||||||||||||||||||||||||||||||||||||
sin |
τ |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
r - коэффициент корреляции (1÷ 0) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
M = |
|
|
|
|
|
|
|
|
|
m ЛП2 |
1 + m ЛП2 |
2 , при r = 0 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
sin |
τ |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
m ЛП = |
|
|
|
P = |
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
M = |
|
|
|
1 |
|
|
|
|
|
|
m |
ЛП1 |
|
2 |
|
|
m |
ЛП2 |
|
2 |
|
|
2rm |
ЛП1 |
m |
ЛП2 |
cos τ |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
− |
|
|
|
|
||||||||||||||||||||||
sin |
τ |
|
|
|
|
|
|
|
g |
|
|
|
|
|
g g |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||||
M = |
|
|
|
|
a2 |
|
+ b2 , a и b - полудиаметры радиусов погрешностей. |
|||||||||||||||||||||||||||||||||||||||||||||
R пред |
= 3M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Обобщённаятеориялинийпложенияпозволиларасширитьметодаполучения обсервовакорди,котмонподррыеатжноныхтриагруппызделить:графические (использованиекартсеткамиизоолинийнепосрокладкаедственнаяизолиний), графо-аналитическиеобобщён( ныйметодлинийположенияиспользования
специатаблицопределяющьныхточекдляпострлиноложения),хй аналитичпрямые( алг методыбраичскийрешураскиениявычислениянений использметодхордиликасательныхв )ни. м
18Опознование. раз личныхбереговыхориентировсредствнавключая, игации маябуи,бакены, топогрзнакивдневноефиночноевреские.Дальностьмя открытиямаяка
Дальностьювидимостиназываетнаибольшеерас,скотороготояниеглазунаблюдателя становвиднаблюдимымтся аемыйобъект.
Различаютгеографоптическуюдальностивидимости.
Географическаядальностьвидимости |
— дальностьоткрытияночьюмаячог,днемяого |
||
башнимаякаилизн ка |
— зависоткривизныземли,трефракцииатмосферывысот |
||
огня,ба |
шниили |
знаканадуровнемморя. |
Дальностьоткпривыглазатиясоте |
наблюдат,равнойм5опрпоеформуледеляется
гдеL — дальностьоткрытиявморскихмиля;Н |
— высотамаякаилизнметрахканад |
|
уровнемморя; 2,08и4,65 |
— посткоэффициентыянные. |
|
Рис. Схема21дальности. видимости:АВ |
— геогрдальностьфвидимости;ческаяАС |
— |
оптическаядальностьвидимости |
|
|
Засчретфракциидальностьоткрытувелсреднемичиваетсяна8%. |
|
|
Оптическаядальностьвидимосзависитотсведанныховыхмаяка,проз |
|
рачности |
атмоиусловийнаблюдферыот(кривизныземлинезависитния). |
|
|
Есливзятьпривышемаячеденисточникиныесвета, ихд льностив димости |
|
|
будутпримерноследующими:а)малыймаячныйогоньсилоювета121свечупри |
|
|
прозрачнойатмосферебуд |
етвиденсрасст6,5момрскойяния,или12километров; |
|
б)маячныйогоньсилоювета2 600свечейбудетвиден000расстояния34м,или 62,9километра;
в)маячныйогоньсилоювета3 160свечейбудетвиден000расстояния37м,иль 68,5километра.
Зачастую,когдамаякнаходзагорисмтсязнеовиденрянт,мореплавательмвидит егоотсвнанебеилинатыоблакахугориз,этодаетемунекоторуюнтавозможность предваритопределитьпел,илинапрльнонг, маяк.вление

Средства навигациоборудованиям СНОрейнного)(. |
Взависимостиотвида |
||
используемогоборазличудованиязрительные, ютдиотехнические, |
|
||
электромагнитные,гидроакустическиезвукосигнальныеСНО. |
|
|
|
ЗрительныеСНО |
— |
специальныестационарныеилиплавучиесооружения, |
|
конструкции,устройства,предназначдляопредкоорсуеленныевмореднинатлиия |
|
|
|
дляориентисуднапутемзрительновоспранияихформыиятиягокраскиили |
|
|
|
излучаемсветовсигналов. ых |
|
|
|
РадиотехническиеСНОРТСНО( ) |
|
— специаназемплавучиеьиные |
станции, |
работающиеврадиочастотдиапазоне,предназначенныедляомшениязадачнавигации совместносудовымитехничесреднавигациис.ктвами
ЭлектромагнитныеСНО |
— |
устройства,создающиеводепривсл дноме |
атмосфеэлектполер,испоомагнитноеы |
|
льзуемоедляопределекоорсуднинатия |
помощьюсудовыхтехническихсредствнавигации. |
|
|
ГидроакустическиеСНО |
- |
устройства,излучающиепод одныеуковыесигналы, |
исподопределеьзуемыеякоорсупомощьюднинатсудовыхияехническихсредств |
|
|
навигации. |
|
|
ЗвукосигнальныеСНО |
— |
устройства,излучающиевоздушнсредезвуковыей |
сигналы,предназначендляпредупмо еплавателейонжденияыеавигационных |
||
опасностяхвуслоплохойвидимостияхпутемслуховоговосприятияэт .гналов |
|
|
СНО,координатыместа |
|
режимыработыкоторыхуказанывофициальном |
навигационномпособиинавигационныеесеныкарты,называются |
штатными |
|
СНО. ,работакоторыхнахподпосиктосянтролемобслуживающегонным |
||
персонала,назыв ются |
обслуживаемыми СНО. |
|
Автоматически действующиеСНО,обслуживаниекоторыхпроизводитсяпериодически,
называются необслуживаемыми СНО.
СНО,устанаввременнодлобеспеченияиваемыегидрогработилирешенияафических |
|
|
специальнзадачсуд, зываютсямих |
нештатными СНО;коордтакихСНОнаты |
|
указываютсяИзвещениях« мореплавателям»см. (§ 68). |
|
|
Навигацморскойныйиентир |
— объекоординаты, которогоизвестны, |
|
исподопределеьзуемыйякоорсуилидляинатегоориентирования. |
|
|
Морскоймаяк |
— СНО,представляющеесобойспециальноекапит |
альноесооружение, |
дальностьювидимбелилиприведенгостикнемуцветогнеменееыхыхй 10 |
|
|
миль. |
|
|
Светящийсяморскойнавигационныйзнак |
— СНО,представляющеесобой |
|
капитальноесооружение, имеющсветооптиче |
скийаппдаратльностью |
|
видимбелилиприведенныхогости |
кнемуцветогменееейых10миль. |
|

Необслуживаемыйсветящийсянавигационныйзнакэлектри |
|
|
|
ческим |
|
светооаппиавтоматическимаратомрадиомая |
(АЭРМ К). |
|
комназывают |
||
автоматическимэлектрорадиомаяком |
|
|
|
||
Знаквигационныйнесветящий |
|
— дневнойнавигационный |
ориентир, |
||
предссобойтажевляющийкоружение,как |
светящийсянавигационныйзнак, |
|
|||
нонеимеющийсветотехниче |
|
скойаппар.Част знактоурый |
|
оборудуется |
|
радиолокационнымирежеоптическимотражателем. |
|
|
|
||
Морскнавигационныйогонь |
— СНО,представляющеесо |
|
бойсветовойприбор, |
|
|
устанаестестввливаобъекмыйнных |
тахилисооруженияхнеспециальной |
|
|||
постройкипирс(,здание |
т. п.). |
ТакоеСНОчастодейсавтвуетоматически. |
|
|
|
Портовыйогонь |
— огонь,установлпредакватоелахнный |
|
риипорта. |
|
|
Морскойнавигационныйствор |
|
— створ,образованныйсред |
|
ствнавигационногоми |
|
оборудованияморей,предназначенный |
дляобесудовожденияпечения |
|
пределах |
||
ствзо.рнойны |
|
|
|
|
|
Морскиеплавучиепредостерегательныезнаки |
(ППЗ) |
— плавучиеСНО |
видебу в |
||
иливех,устанаякорьдвливаемые |
огражденияморскихнавигационных |
|
|||
опасностей,обозначенияпо |
ложенморскихканаловфарватеровя,подводныхкабел |
|
|
ей, |
|
рыболовныхснастей,местякорныхстоянок. |
|
|
|
|
|
Вехапостоянная |
— закрепленныйвгрунтедер( иливянный |
|
металлический)шест |
||
топовымифигурами,инсосветотехнигда |
|
ческимустройством,предназначенныйдля |
|
||
обозначенияканалов, |
фарватеровилиграницспециальныхводныхрайонов, |
|
|
|
|
также дляогражденияотдельныхопадлясудовожденияпрепятст |
|
|
вий. |
|
|
Плавучиймаяк |
— специальпостроенноесудноразмещен |
|
ныминаборту |
||
средстваминавигационногооборудов,предн нияз |
|
наченноедля |
ограждения |
||
навигационопасностейорие ых |
|
тированияпонемусудов. |
|
|
|
Радиомаяк — передающаярадиостанцияфиксированным, |
|
|
известным |
||
морепположение,авателямкоторыйизлучаетус |
|
тановленнвремяприсвоенные |
|
||
емуопознавательныезнаки |
сигналы заданныхчастотах. |
|
|
|
|
Аэромаяк — навигационзрительориедлясамонтирый |
|
|
летов,оборудованный |
||
светотехуста,позволяюнической |
|
щейврядеслучаиспользоватьеедля |
|
|
|
морскихсудов. |
|
|
|
|
|
Берпеговыеленгатордальномерныеи ста ции |
— радиотехнические, |
|
|||
теплотехническиеилигидроакустическиеустройст |
ва,установленныенаберетуи |
|
|||
предназначдляуточненияные |
|
местасудна,вморе. |
|
|
|
19Определение. местасуднаповизуапелбереговыхьнгаориентировым,по пеленгуирасстояниюизмереннымпорадару.СКП определенияместасудна
Опреместаподвумелениепеленгам:
Способопределенияместасупонавумпелеодинизаиболеегам распрострприплавузкостяханиливдольённыхииберега,вблизинавигационных опасностей.
Этообъясняетсяещёитем,чточастов |
видимостисуднанебываетодновременно |
большогоколичестваориентиров.Сущнспособатледующемоить.Вбыстрой |
|
последовательносберутпеленгидвухобъектовмаяков( ,знаков,мысови.ди.) |
|
Рассчитываютистинныепеленги,еслиимпоправкаетсякомпа |
са,ипроклихнадывают |
карте. |
|
Вточкепересеченияпеленговбудетобсервованноеместосудна |
F. |
A |
B |
Θ
F
Этотспособимеетрядпреимуществпросто( быстоп а),ноеделенияотаряд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
недостатков,главнымизкоторыхявляеполноесконутсяприедтролявиничноме |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
определении. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Велинейнойошибкичинуобсервместаполучитьважноформуленогодля |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
систематическойошибки |
ek град,подставляянеёзначенград: иентовя |
|
|
|
|
|
|
|
|
||||||||||
g |
= |
57,3° |
; g |
2 |
= |
57,3° |
;и |
v = ε |
k |
градполучим: |
|
||||||||
|
|
|
|||||||||||||||||
1 |
|
|
D1 |
|
|
D2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
εk AB |
|
|||||
|
|
εk |
|
|
|
|
|
|
|
|
|
= |
|
||||||
FF = |
|
|
|
|
D 2 |
+ D 2 |
− 2D D |
2 |
cos Θ |
, |
|||||||||
|
|
|
|
|
|
||||||||||||||
1 |
|
57,3°sin Θ |
1 |
2 |
1 |
|
|
|
57,3sin Θ |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где AB – расстояниемеждуориентирами. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Изэтойформулывидно,чтовеличина |
|
|
|
|
|
|
|
|
|
FF1 бувделичиватьсяуменьшением |
Q (при |
||||||||
постоянном AB и ek)Поэтому. при30 |
|
|
о>Q>150o,когда |
sinQ уменьшаетсяособеннобыстр, |
|
||||||||||||||
определместаподвумлнеиесчитатьнгамльзяточным. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Влияниеслучайныхошибокпеленгования. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пеленгованию,каклюбомуизмерению,сопутствуютслучайныеошибки,которым |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
можошибкитнестииз |
-занеточннаведения,кости |
|
|
|
|
|
лебанийвмоменткачки, |
|
|||||||||||
отсутствиестабилизациивертикальнойплоскосдр.Этоприводитому,что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

любомуизмеренпеленгусоответствуетошибкаому |
|
|
|
|
± mn ,град.Еслитакуюошибку |
|
|||
подставитьформулудляоценкиточностиобсервованного |
|
|
|
|
|
|
места,тополучимформулу |
|
|
длясреднейквадратическойпогрешностиобсервациидвумпеленгам: |
|
mn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M = |
|
|
|
D 2 |
+ D 2 . |
|
||
|
|
|
|
|
|||||
|
|
|
57,3°sin Θ |
1 |
2 |
|
|
||
Формулапоказывает,чтопрималыхблизких180 |
|
|
|
о углах Q ошибкиувел. чиваются |
|
||||
|
|
|
|
|
|
||||
Следоват,местобудетполутольнопричатьсянее |
|
|
|
|
Θ = 90° .Точностьопределения |
|
|||
зависиттакжеотрасстояниядоориентиров. |
|
|
|
|
|
|
|
|
|
Приопределенииместасупонавумпеленгамошибкавпринятойпоправкекомпаса |
|
|
|
|
|
|
|
|
|
можетбытьзначитболс еучайныхошибокельно. |
|
|
|
|
|
|
|
|
|
Дляопределенияправильнзначенияпоправкикомго |
|
|
|
|
|
пасапопеленгамдвухпредметов |
|
||
достнайтивелточноеёош,азатеминуалгебраичесбкивычестьэтуошибиз куи |
|
K = |
Kпр - εk ,где DК – поправкакомпаса, |
|
|||||
призначенияпоправкиятогокомпаса: |
|
DКпр |
|||||||
– призначениепоправкиятоекомпаса, |
|
eк – ошибка призначениясятогоеёзнаком. |
|
||||||
Определениеместапотрёмпеленгам. |
|
|
|
|
|
|
|
|
|
Приопределместапотрёмленгамвниибыстройпоследовательностиберут |
|
|
|
|
|
|
|
|
|
пеленгатрёхпредметов |
A, B, C.Переводятихистинныепрокладываютнакарте.Если |
|
|
|
|||||
бынаблюдениянесодержалиошипеленгиокыливзятыодновременно,товсетри |
|
|
|
|
|
|
|
|
|
пелересеклисьнгабыводнойточке |
F,представляющейсобойместосудна. |
|
|||||||
Однакоиз |
-занеизбежногодействиярядафакт ро |
|
|
|
|
впеленгиобычнонепересекаютсяв |
|
||
однточке,а брйназываемыйкзуюттреугольникпогрешн.Егоявлениеможетсти бытьвызваноразлидамичнымишибок:
•Промахамиприснятсчётапрсправлениикомпаспеле; ыхгов
•Ошибкивопознаванориент; ирови
•Ошибкивпринятойпоправкекомпаса;
•Случайныеошибкипеленгованияпрокладке.
Чтоизбграфическихыежатьошибокприпост,можнорассчоениитать параллесмещеникаждлинииьпооеложенияйприизмепоправкинаении3…5 о и построитьновыйтреугольникпогр ешности,перенесявселинииположениявсторону увеличилиуменьше.Дляраиясмещесчётанияеобходимонскартыияять расстояниякаждогоизтрёхпредметов.Тогда:
n = |
v1 |
= |
εk |
D |
|
, |
n |
|
= |
v2 |
= |
εk |
|
D |
|
, |
n |
|
|
= |
v3 |
= |
εk |
D . |
|||
1 |
g |
57,3° |
|
A |
|
|
2 |
|
g |
2 |
|
|
57,3° |
|
B |
|
|
3 |
|
g |
3 |
|
57,3° |
C |
|||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Влияниеошибки |
,вызваннеодновремевзятипелй,можноисключитьнговным |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
несколькспособами.Однихиз |
|
|
|
|
|
|
– правильныйвыборочевзятияёдностипеленгов. |
|
|
|
|
|
|
|
|
|
|||||||||||
Первымможнопеленговатьобъекты,располоближекдиаметральнойенныеплоскости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
судна.Пеленгиэтихориентиров |
|
|
|
изменяютсямедленнее.Еслиберутсяпелогнейги |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
маяков,тонаблюдениенадотакорганизовывать,чтобынепришлдолгождатсь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
проблеска,гняеслионпеленгуетсянепервым.Прискоростидо15уз,когдапрокладка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ведётсянапутевыхкартах,этогодостаточно |
|
|
|
|
|
|
|
|
|
|
дляисключеношибкот ия |
|
|
|
|
|
|
|
|
|
|||||||
неодновременногопеленгованскоростях.Прибольшилиприведехпрокладкинаии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
крупномасштабныхкартахилипланахдляуточненияследупривестикленга |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
среднемумоменту.Дляэтогоберутпятьпеленгвследующемо,пелеврядке |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нгуют |
||
ориентиры A, B и C,азатемещёповторобратномпелеВиАнгипорядке.Считая,что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
пеленгиизменяютсялинейно,рассреднчитываютзначениеп ленговобъАВ. ктов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Π A = |
Π1 + Π5 |
|
, ΠB = |
Π2 + Π4 |
. |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Поправкойкомпаса |
|
называетсявеличинапараметракурса( илипеленга), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
компенсирующаясистематическуюошегозмерениябку.Вобщемвидепоправка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– это |
|||
систематическаяошибка,взятаяобратнымзнаком. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Постояннуюпоправгирокомпаса |
|
|
|
|
DГКпокаждориентирупределяютмукак |
|
|
|
|
|
|||||||||||||||||||
разностьистинногосреднизмпеленговренного: |
|
|
|
|
ГК = ИП - ГКПср . |
|
|
|
|
|
|
|
|
|
|||||||||||||||
Опрасстоянийеделениевморе. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Расстояниевморежпределитьнесколькиметода:использованиемми |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
дальномеров,повертикальномууглу,измереннымсекстаном,поданнымРЛС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
глазомером. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дальномерыпредставляютсобойоптические, змеряющиеборырасстояниядо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
видимогопредметанаосноверазличпринципов. ых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Определениеместасуднапоизмереннымрасстояниям. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Есливвидимостисуднаимеютсядваор,докоенизмеренытораыхсст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оянияпо( |
||
вертикальугилиподануРЛС),нтобсервованыммуместасуднаможполучитьные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
подвумрасстояниям.ПустьАВ |
|
|
|
– дваобъекта,докотоичмереныыхасстоянияДА |
|
|
|
|
|
|
|
|
|
||||||||||||||||
ДВ.Известно,чтоизмеренномурассот тветствуетизолинияянию |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–окружность |
|||
радиусом,равнымэтомурас,исцентромтояниювточкерасположенияориент.Есл ров |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
обан блюсделао нов,то,пыияроложивдвемокруженно,однизточекйсти |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
получимместосудна.В томпрос,какуюиздвухтосчитатьекобсервованнымместом, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
легко решаетсяпутёмсопоеёсосчислимымтавленияместом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Средняяквадратическаяпогрешнобсервацииместадвумстьсстояниям |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
получается,есливобщуюформулуподставзначенияошл положениятьбокний, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
помня,чтоградиентрасстояравенедин. ияце |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
M = |
|
|
|
|
n2 + n |
2 = |
|
|
|
|
|
m 2 |
+ m 2 . |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
sin |
Θ |
|
|
1 |
|
|
2 |
|
|
|
sin Θ |
|
|
|
D |
D |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Определместасуднапопеленгуирасстояниюние. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Этотспособнаиболеечастоупотриспользованииебляетсярадиолокатора.Обычно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
пеленгирасстояниеизмеряютдоодногоориентира,однакобываетцелесообразнее |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
измпеналенгритьсветя |
щийсямаякпокомпа,расизмерстоянберегаудо.Вить |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о,авовтором |
|
||||||||
первомслучаеуголпересечениялинийположбудравен90тния |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– разности |
|||||
пеленгов,снятыхкарты.Расстояниеможетбытьизмеренопомощьюсекстана |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вертикальномууглулибополучено |
|
|
|
приближённопооткрытиимаякаилигл ,призомерно |
|
|
|
|
|
|
|
|
|
||||||||||||||||
плавпофаниирилвузкостяхатеру. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Чтобыуменьшитьошибкинеод овременностиаблюдений,вначалеизмеряются |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
расстояния,затберётсяпеленгмприположениипредметаближектраверзу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
обратнойпоследо |
вательности – приострыхугла.Обсервовместополучаетсян нное |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
лиИПнрассииотпредметаоянии,равномД. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приизмпелерирасстндоиигаодногоянияриентирасредняяквадратическая |
|
Θ = 90° ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
погрмесуднашностьстаравнаугол( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
D |
2 |
|
|
|
|
|
|
|||
|
M = m ΛΠ2 + m |
ΛΠ2 |
= |
|
П |
|
+ m D2 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
57,3° |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Приизмпелерирасстндоиигаразныхояниябъектовтребуетсязнатьугол |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
пересечения,тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
= |
1 |
|
m |
Π |
D |
2 |
+ mD2 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
sin Θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Использразннаблюдеовремание. ныхий |
|
|
|
|
|
|
|
|
57,3° |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Вотличиеодновременаблюдений,раз овременнымиазываыхнабл, ютден я |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
результакоприводяторыхкодномумессуднапотусчислению.Полученноетаким |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
образомместо,называютсчислимо |
|
|
|
-обсервованным. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Крюйс-пеленг – определеместасуднараз иеповрлеодногонгованиемменным |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
тогожеориентира.Длятого,чтобыопределенияпокрюйс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-пеленгубылоправильным |
|
||||||||
необходимо,чтобыуголмеждупервымвторымпеленгамибылнееньше30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о инеболее |
||||||||
150о. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mΠ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
= |
|
|
|
|
|
|
|
D 2 |
+ D 2 |
+ (K |
|
t )2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c o |
|
57,3°sin Π 1 |
2 |
|
c |
|
|
|||||||||
Крюйс-расстояние – еслиестьодинор мыентирможемизмеритьтолькорасстояние |
|
|
|
|
|
|||||||||||||||||||||||||
доэтогоориентира,тодля |
|
|
|
|
|
|
определенияместасуднаможетбытьиспользованэтотспособ. |
|
|
|
|
|
||||||||||||||||||
Расчётаналогиченрасчётукрюйс |
|
|
|
|
|
|
|
|
|
|
|
-пеленга. |
|
|
|
|
|
|
|
|
|
|||||||||
Определениеместапогоризонтальнымуглам. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Этотспоссамыйтоизчныйспособоввизуальногоопределенияместа.Обычномы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
используопределениегоризонтм |
|
|
|
|
|
|
|
|
|
|
|
|
|
альнымугладляполучениянаиболееточногоместа |
|
|
|
|
||||||||||||
приконтроледругпр.Такиеборовхпроверкипроизводятсянастоянкеу( иличала |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
наякоре)После. измуглмреождунрви,берёмяентирамикальку,наносимэтиуглы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
кальку,заткладёмеётак,чтобыст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ороныугловсовпалинакартеор .ентирами |
|
|
|
|
|||||||||||
gα |
= |
DAB |
3438 |
, |
|
|
|
Θ = α + β, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
DA DB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M |
|
|
|
m |
α |
|
|
|
D |
A |
D |
B |
|
|
2 |
|
D |
B |
D |
C |
2 |
|
|
|
|
|
||||
α ,β |
= |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
3438sin Θ |
|
|
DAB |
|
|
|
|
|
DBC |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Любыеизмерсодоше,нржатпоэтомуи,бкияизмпеленг,дистанциюривилиугол |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
ирасположсоответствующуюнакарте изолин,нельзясчи, судноатьбудет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
находитьсяэтойизолинии. |
|
|
|
|
|
|
|
|
|
Вычивозможноеслмещениеизолиниить |
|
|
|
|
-заошибок |
|||||||||||||||
можно,исппоградиентальзуянятиефункции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Вектор g называется градиентом – этовектор,наппонормалиавленныйк навизолиниигацвсторонуеёоннойсмещенияприположприращениительном пара,причёметраодульэтоговекторахарактерн ибольшуюскоростьзмененияует паравданномместеетра.Эт равентдуль:
|
g = lim |
|
U |
|
= |
dU |
. |
|
||||||
|
|
n |
|
|
||||||||||
|
|
n→0 |
|
|
|
dn |
|
|||||||
Еслипризмерениинавигационнагопараметра |
|
|
|
|
|
|
|
|
U допущенаошибк |
DU иизвестен |
||||
гради,тосмелинищенположеннтпараллельнои самсебеиопределяетсяй |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
формулой: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n = |
|
U |
. |
|
|
|||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
Чембольшевеличинаградиента |
g,темменьшесмещенлиниие |
|
|
|
|
|
|
полопритойжения |
||||||
ошибке DU,темточнеебудетопределениеместасудна. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Еслипризмерениинавигпарационнместслучайнаятрапогрешностьго |
|
|
|
|
|
|
|
|
|
|
|
|
|
mП, |
град,топогрешлинииполоайдётсяжениястьпоформуле: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mΛΠ |
= |
mΠ |
= |
mΠ D |
. |
|
|||||||
|
|
|
|
|||||||||||
|
|
|
g |
|
|
|
57,3° |
|
|
|||||

Полосаположения,ширинаковторрабзаосреднейльше,захватывместасуднает |
|
|
|
|
|
|
|||||
свероятн99,7%Такуюполосуназываютстью. |
|
|
предеполоьнойлсжения |
. |
|||||||
Аналитически τ |
вычисляетсяпоформуле: |
τ = Π1 +δ ± 90,где d –вспомогательныйугол. |
|||||||||
Значениеугла |
d получаетсявычислением: |
|
|
|
|
|
|
||||
|
|
|
tgδ = |
D1 cosα − D2 |
. |
|
|
||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
D1 sinα |
|
|
|||
Смещениелинииположениявмиляхравно: |
n = U = mα = |
|
|
|
|
||||||
|
|
3438m αD1D2 |
, |
|
|||||||
|
|
|
|
|
|
|
|
ʹ |
|
|
|
|
|
|
g |
|
|
g |
|
d |
|
|
|
где m’a - погрешностьуглавдуговыхминутах. |
|
|
|
|
|
|
|||||
Дляпредотвращениянавигацаварий,связанныхонных |
|
|
|
|
поснмельа,нарядудкойс |
||||||
другимимероприятпред опыринималисьнормямиткиребк оватьния |
|
|
|
|
|
|
|||||
точничастотестибсервзависимостиотацусловийплавания.Неоднократное |
|
|
|
|
|
|
|||||
обсуждениеэтихвопросовкомитетепобезопасностимореплаваМеждунияародной |
|
|
|
|
|
|
|||||
морскойорганизацииИМО( )привелоксоздстанточностииюдартасудовождения, |
|
|
|
|
|
|
|||||
принятомув1983г.на |
|
-йАссамблееИМОврезолюции.529. |
|
|
|
|
|||||
Цельпринятогостандартаобеспеченруководстваразличногороеминистраций |
|
|
|
|
|
|
|||||
стандартамиточностсудовождения,ко |
торыедолжныприменятьсяоценке |
|
|
||||||||
эффективностиработысист,пр дназначмдляопредмессуд,втленияыхомаа |
|
|
|
|
|
|
|||||
числерадионавигационныхсистем,включаяспутниковые.Отсудоводителятребуется |
|
|
|
|
|
|
|||||
знатьсвоеместоналюбоймомвр.еВстантмеуказаныидарте |
|
|
|
|
|
факторы,влияющие |
|||||
натребк очностиваниясудовождения. |
Книмотносятся: |
|
|
||||||||
скоростьсудна,расстояниедоближайшейнавигационнойопасн,которойсти считаетсявсякпр илизнананесённыйкартуэлеме,границарайонат плавания.
Приплаваниидругих водахсоскоростьюдо30узловтекущееместосуднадолжно бытьизвестпогрешноболее4%расдостближьюоянияопа.Прийшейсности этомчнестадолжоцестьфнаипогрешнгуройватьсяучётомслучайныхистей систематическихошибвероятность ю95%ВстандартИМОвключена. таблица, котсодержиттребраяк очностиванияместа,такжедопустимоевремяплаванияпо счисленприусловии,чтог рокомпасюлагвремя( плавания),соответствуют
требоваИМО,счислениенекорректировалосьиям,погрешнос тиимеютнормальное распре,течениедрейфелениеучитываютсявозможнойточностью.
СКП95%:
R 95% = 2M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СКП = |
|
∑ i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
i = X i − X ср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
X ср = |
∑ X i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
OF = |
|
|
Μ − погрешность места судна |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
g = |
|
|
U |
= |
dU |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
dP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
P → 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
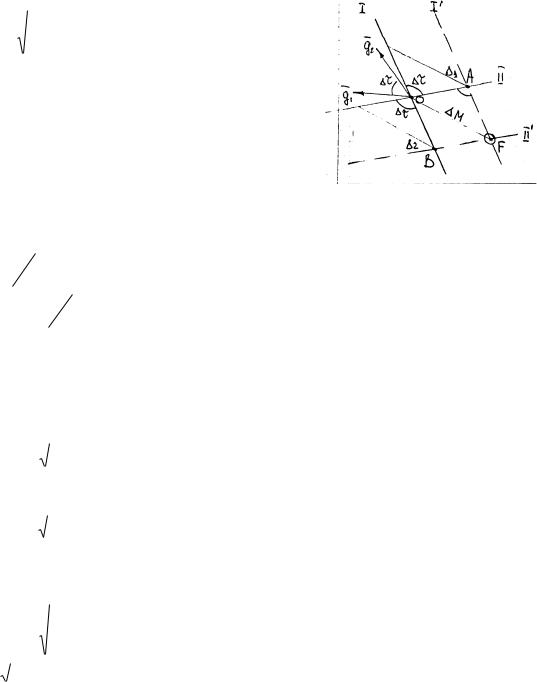
OAF : |
|
2M = OA2 + AF2 − 2OA AFcos τ |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
OA = |
1 |
sin τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
OB = AF = |
2 |
sin τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2M = |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
− 2 |
|
|
|
|
|
|
cos τ |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
1 |
|
|
|
|
+ |
|
|
|
|
|
|
2 |
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
sin |
|
|
|
|
|
|
sin 2 τ |
sin 2 |
τ |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||
∑ M |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
∑ |
1 |
2 |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
+ |
|
2 |
|
− |
|
|
cos |
τ |
|
|
|
|||||||||||||||||||||||||
n |
|
|
|
sin 2 |
τ |
|
|
|
n |
|
|
|
|
n |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
M = |
|
|
|
|
|
|
|
|
|
|
|
(m 2 |
|
|
+ m |
2 |
|
|
|
|
− 2rm |
|
m |
|
|
|
cos τ ) |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЛП2 |
|
|
ЛП2 |
|
|
||||||||||||||||||||||||||||||||
|
|
|
sin |
τ |
|
|
|
|
|
|
|
|
ЛП1 |
|
|
|
|
|
|
|
|
|
|
ЛП1 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
r - коэффициент корреляции (1÷ 0) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
M = |
|
|
|
|
|
|
|
|
|
|
|
mЛП2 |
1 + mЛП2 |
2 , при r = 0 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
sin |
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
mЛП = |
|
|
|
P = |
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
M = |
|
|
1 |
|
|
|
|
|
|
|
|
m |
ЛП1 |
2 |
|
m |
ЛП2 |
2 |
|
2rm |
|
m |
ЛП2 |
cos τ |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
− |
|
|
|
ЛП1 |
|
||||||||||||||||||||||
sin |
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g g |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
g |
2 |
|
|
|
|
|
2 |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||||
M = |
|
|
a2 + b2 , a и b - полудиаметры радиусов погрешностей. |
|||||||||||||||||||||||||||||||||||||||||||||||||
R пред = 3M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||