

3.4 Розробка експериментальної лінійної математичної моделі динаміки методом активного експерименту
Розробка математичної моделі може здійснюватися за допомогою можливостей Hysys, але недоліком даного способу є його орієнтація скоріше на пасивний експеримент, ніж на активний, тому графіки перехідних процесів до сталих значень не доходять через неконтрольований інтервал зміни стрибка.
Тому доцільно використати наявну в Hysys модель, доповнюючи її можливостями пакета Matlab. Для обміну інформацією програм мовою Matlab з Hysys скористаємося бібліотекою для роботи з Hysys за допомогою протоколу DDE. Разом з нею необхідно використати 3 функції (Додаток В): ініціалізації (init_hysys.m), зміни параметра (setHysVar.m), одержання значення параметра (getHysVar.m).
В Hysys задаємо параметри, що підлягають одержанню та передачі. Для цього створюється електронна таблиця (Spread Sheet) з параметрами каналів, що одержує автоматичне ім'я SPRDSHT-1.

Рисунок 3.1 - Параметри, що підлягають одержанню та передачі
Наведена програма (Додаток В) проводить активний експеримент та автоматично апроксимує передатні функції за допомогою функцій Identification Toolbox.
Активний експеримент виконується за планом:
Стабілізація параметрів за допомогою регуляторів
Провести стрибок величиною 10% по витраті газойля зі стріппінгу
Стабілізація параметрів за допомогою регуляторів
Провести стрибок величиною 10% по витраті дизеля зі стріппінгу
Стабілізація параметрів за допомогою регуляторів
Провести стрибок величиною 10% по витраті зрошення в колону
Стабілізація параметрів за допомогою регуляторів
Провести стрибок величиною 10% по рівню гасу в ребойлері
Стабілізація параметрів за допомогою регуляторів
Провести стрибок величиною 10% по температурі зрошення
Стабілізація параметрів за допомогою регуляторів
Провести стрибок величиною 10% по температурі флегми
Стабілізація параметрів за допомогою регуляторів
Апроксимація передаточних функцій за допомогою Identification Toolbox.
В результаті виконання програми одержимо графіки розгінних характеристик та апроксимовані передаточні функції (рис. 3.2 – 3.8).

Рисунок 3.2 – Реакція каналів на стрибок 10% за витратою газойля зі стріппінгу

Рисунок 3.3 – Реакція каналів на стрибок 10% за витратою дизеля зі стріппінгу

Рисунок 3.4 – Реакція каналів на стрибок 10% за рівнем гасу в ребойлері

Рисунок 3.5 – Реакція каналів на стрибок 10% за температурою зрошення

Рисунок 3.6 – Реакція каналів на стрибок 10% за рівнем в конденсаторі

Рисунок 3.7 – Реакція каналів на стрибок 10% за температурою флегми
Розгінні характеристики апроксимованих передаточних функцій високого порядку майже повністю збігаються з експериментальними розгінними характеристикам, тому можна вважати апроксимовану математичну модель адекватною. Отримані передаточні функції наведені у додатку Б.
Розробка багатомірної сар ректифікаційною колоною
Обґрунтування необхідності використання багатомірного регулятора
Ректифікаційна колона – об'єкт управління зі значною інерційністю і часом запізнювання за каналами управління. При управлінні багатомірними об'єктами, класичні одномірні регулятори не забезпечують оптимальності процесів управління. Тому доцільно використати багатомірні системи управління, так як вони дають найбільш високу якість управління.
Особливе значення має задача про такий вибір закону керування, щоб характеристики досягали своїх екстремальних значень з урахуванням вимоги стійкості відповідних лінійних моделей замкнутих систем.
Першими конструктивними пропозиціями щодо вирішення таких завдань у нашій країні були методи аналітичного конструювання регуляторів А. М. Лєтова та методи синтезу оптимальних стабілізуючих управлінь В. І. Зубова. За кордоном дослідження по даному напрямку (LQR і LQG) були проведені Р. Калманом [36].
Структура і параметри багатомірного регулятора визначаються на основі заданих вимог до САР конкретного об'єкта управління, тому їх синтез проводиться індивідуально. Вибір алгоритму управління повинен відповідати вимогам, що пред'являються до точності і якості процесу управління САР. Чим вище ці вимоги, тим складніше алгоритм управління та регулятор.
В багатомірних САР вихідна величина у є вектором і являє собою сукупність декількох вихідних змінних уi, тому багатомірна САР завжди багатоконтурна.
Аналіз статики і динаміки багатомірної САР аналогічний, але більш трудомісткий порівняно з аналізом одномірної системи. Він еквівалентний випадку для одномірної САР з декількома зовнішніми впливами. Визначення точності, показників якості та побудова перехідних процесів здійснюються незалежно для кожної вихідної змінної (на основі рівнянь, передаточних функцій, частотних характеристик). [37]
Розробка системи автоматичного керування з використанням лінійно-квадратичного П-регулятора з наглядачем стану
На відміну від підходів класичної теорії керування, що намагається скоротити кількість розглянутих зв'язків і керованих змінних, підхід сучасної теорії керування настроєний, навпаки, на більшу деталізацію математичних моделей, що пов'язано з розвитком засобів обчислювальної техніки. Лінійно-квадратичний регулятор (англ. Linear quadratic regulator, LQR) – один із видів оптимальних регуляторів, що використовується для керування складними багатомірними і багатозв´язними об'єктами управління. Даний регулятор використовує метод подання динаміки систем у вигляді простору станів - системи лінійних ЗДР у формі Коші, записаних в матричній формі.
Розглянемо
алгоритм LQR-оптимального синтезу [27].
Для пошуку матриці
 коефіцієнтів
оптимального регулятора необхідно
виконати наступні операції:
коефіцієнтів
оптимального регулятора необхідно
виконати наступні операції:
Сформувати матричне алгебраїчне рівняння Ріккаті:

і знайти його рішення – симетричну позитивно визначену матрицю Р.
2.
Побудувати матрицю коефіцієнтів
 оптимального
регулятора
оптимального
регулятора за
вектором стану.
за
вектором стану.
3. Розрахувати матричні рівняння Ляпунова:


Відносно невідомих матриць Р1 і Р2.
4.
Обчислити значення окремих складових
інтегрального квадратичного функціоналу
для замкнутої оптимальної системи, при
заданому векторі початкових умов
 за формулами:
за формулами:

У безперервному часі критерій оптимальності лінійно-квадратичного регулятора може бути представлений у такий спосіб:
|
|
(23) |

де: x – вектор змінних стану,
u – вектор керуючих впливів,
 -
матриці вагових коефіцієнтів.
-
матриці вагових коефіцієнтів.
У класичній теорії керування зазвичай рекомендується критерій [9], що для систем у формі простору станів у безперервному часі може бути представлений у наступному вигляді:
|
|
(24) |

Модифікуємо його, підставляючи значення похідної з рівняння системи, зведемо цей критерій до критерію J, підстановкою:
|
|
(25) |
|
|
(26) |
|
|
(27) |



Аналогічний критерій можна записати для системи в дискретному часі:
|
|
(28) |
 ,
,який зводиться до критерію J у дискретному часі підстановкою:
|
|
(29) |
|
|
(30) |
|
|
(31) |



Операції алгоритму 1 і 2 виконуються з використанням функції lqr, а 3 і 4 операції - за допомогою функції lyap, що входять до складу пакета прикладних програм СSТ середовища Мatlab.
Виклик функції lqr здійснюється командою:

де: К – вектор з коефіцієнтами, що шукаються,
Р – рішення рівняння Ріккаті,
Еg – вектор з коренями характеристичного полінома замкненої системи.
Якщо вхідний параметр N не заданий, він приймається нульовим.
Функція lуар забезпечує розв'язок рівняння Ляпунова:
 ,
,
а її виклик виконується в наступному форматі:

Для перевірки придатності розробленої математичної моделі високого порядку створена програма Matlab для синтезу лінійно-квадратичного П- регулятора, яка наведена у Додатку Г.
В пакеті Matlab Simulink проведено математичне моделювання реакції замкнутої САР з лінійно-квадратичним регулятором, зі стандартним і модифікованим критерієм, на збурення величиною -5% х.в.м. по всіх каналах ОУ (рис. 4.3). Перехідні процеси за збуренням наведені на рис. 4.4.

Рисунок 4.3 - Модель замкнутої системи в Simulink


2)

3) 4)


5) 6)
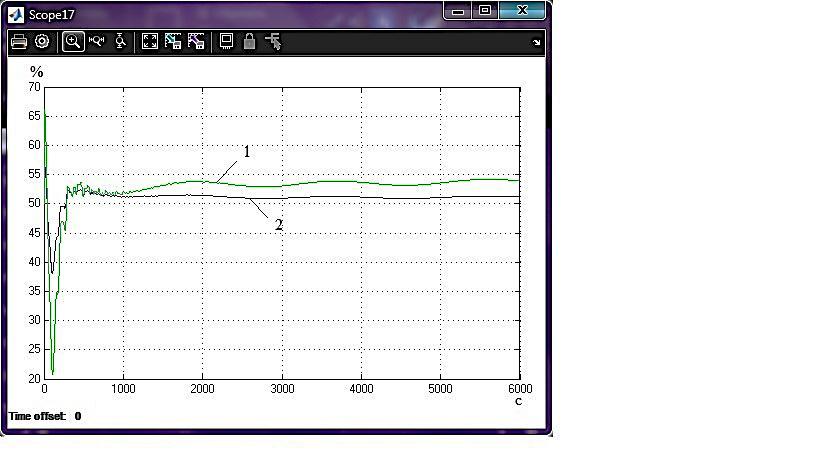
Рисунок 4.4 – Перехідні процеси САР з лінійно-квадратичним регулятором при управлінні за збуренням -5% х.в.м. по всых каналах з використанням для синтезу регулятора стандартного (1) і модифікованого (2) критеріїв оптимальності:
перехідний процес за витратою газойля зі стріппінгу; 2) перехідний процес за витратою дизеля зі стріппінгу; 3) перехідний процес за рівнем гасу в ребойлері; 4) перехідний процес за температурою зрошення; 5) перехідний процес за рівнем в конденсаторі; 6) перехідний процес за температурою флегми.
Як бачимо з графіків перехідних процесів (рис.4.4), використання модифікованого критерію для синтезу лінійно-квадратичного регулятора в порівнянні зі стандартним дозволяє підвищити якість системи регулювання, що особливо актуально для складних технологічних об'єктів управління, таких як атмосферна колона ректифікації К-2. Перехідні процеси мають значно меншу статичну помилку, також зменшився час регулювання та величина перерегулювання.
Таблиця 4.1 – Показники критеріїв якості регуляторів
|
Перехідний процес |
Тип регулятора |
Максимальне відхилення |
Статична помилка |
Час регулювання, с |
Перерегулювання, % |
|
Витрата газойля зі стріппінгу |
стандартний |
0,65 м3/год |
7,05 м3/год |
6000 |
3 |
|
модифікований |
0 м3/год |
0,05 м3/год |
1000 |
0 | |
|
Витрата дизеля зі стріппінгу |
стандартний |
2 м3/год |
1,5 м3/год |
4000 |
1,6 |
|
модифікований |
3,2 м3/год |
0,3 м3/год |
3000 |
2,5 | |
|
Рівень гасу в ребойлері |
стандартний |
33,5% |
4,5% |
2000 |
62 |
|
модифікований |
13% |
1% |
1000 |
25,5 | |
|
Температура зрошення |
стандартний |
4,6°С |
5,81°С |
4000 |
8,6 |
|
модифікований |
0,6°С |
0,1°С |
2000 |
1 | |
|
Рівень в конденсаторі |
стандартний |
4% |
6% |
6000 |
7 |
|
модифікований |
5% |
1% |
500 |
10 | |
|
Температура флегми |
стандартний |
1,35°С |
0,43°С |
5000 |
3 |
|
модифікований |
0,6°С |
0,23°С |
3000 |
1,4 |