

Пичугин. Лабы. Реш / 2 вар17
.docМинистерство образования и науки Украины
Одесский национальный политехнический университет
Кафедра компьютеризированных систем управления
Лабораторная работа №2
на тему:
«Синтез замкнутой оптимальной по быстродействию системы и ее исследование на модели»
по курсу
«Оптимальные и адаптивные системы»
Выполнила: ст. гр. АТ-001
Проверила: доц. Трофименко Т.Г.
Одесса 2006
Цель работы – аналитическое построение замкнутой оптимальной по быстродействию системы и ее исследование на модели.
Рассмотрим синтез замкнутой системы, оптимальной по быстродействию, методом фазовой плоскости объекта, описываемого уравнением:
![]() . (1)
. (1)
Ставится задачи
определения управления, переводящего
изображающую точку фазовой плоскости
начального положения
![]() в конечное
в конечное
![]() за минимальное время.
за минимальное время.
Будем оперировать
ошибкой системы
![]() .
При этом в начале управления ошибка
максимальна. По мере приближения системы
к заданному состоянию ошибка уменьшается
и становится равной нулю в заданной
точке. Таким образом, задача заключается
в переводе в фазовой плоскости вектора
ошибки из состояния
.
При этом в начале управления ошибка
максимальна. По мере приближения системы
к заданному состоянию ошибка уменьшается
и становится равной нулю в заданной
точке. Таким образом, задача заключается
в переводе в фазовой плоскости вектора
ошибки из состояния
![]() при
при
![]() в
состояние
в
состояние
![]()
![]() за минимальное время.
за минимальное время.
Перепишем уравнение (1) относительно ошибки:
![]() . (2)
. (2)
Найдем уравнения фазовых траекторий. С этой целью перепишем предыдущее уравнение в виде двух уравнений первого порядка:
![]() (3)
(3)
![]() (4)
(4)
Разделим (3) на (4)
![]() . (5)
. (5)
Проинтегрируем (5), получим:
![]()
Откуда
![]() (6)
(6)
Уравнение (6)
определяет семейство фазовых траекторий,
каждая из которых зависит от начального
значения ошибки. После определения
постоянной интегрирования С из условия
![]() уравнения (6) примет вид:
уравнения (6) примет вид:
![]() (7)
(7)
С учетом знака управляющего воздействия, перепишем равенство (7):
![]() (8)
(8)
Введем обозначения
![]() ,
тогда из (8) следует
,
тогда из (8) следует
![]()
Приняв из начальных
условий
![]() ,
получим
,
получим
![]() (9)
(9)
Уравнению (9) соответствуют фазовые траектории системы в координатах ошибки и ее производной.
Определим уравнение
фазовой траектории, проходящей через
начало координат, где
![]() :
:
![]()
![]() (10)
(10)
Уравнение (10) – уравнение линии переключения. Эта траектория является единственной, по которой можно попасть в начало координат.
На линии переключения имеет место равенство: sign()=sign(x), с учетом которого получим функцию переключения:
![]() (11)
(11)
Уравнение (11) используют для построения замкнутой, оптимальной по быстродействию системы.
3.7. Построение фазовой траектории замкнутой системы, оптимальной по быстродействию
Фазовые траектории представляют собой геометрический образ проходящих в замкнутой системе динамических процессов. Воспользовавшись равенствами (3.32) и (3.33) и подставив в них исходные данные, получим:
![]()
![]()
Результаты вычислений приведены в табл. 4
Таблица 3.4.
|
x |
-20 |
-16 |
-12 |
-8 |
-4 |
0 |
4 |
8 |
12 |
16 |
20 |
|
(0=0) |
0.989 |
0.649 |
0.375 |
0.172 |
0.044 |
0 |
-0.0441 |
-0.172 |
-0.375 |
-0.649 |
-0.989 |
|
(0=1.8) |
0.4555 |
0.9705 |
1.3494 |
1.6064 |
1.7531 |
1.8 |
1.7559 |
1.6285 |
1.4247 |
1.1504 |
0.8110 |
График
фазовых траекторий приведен на рис.1.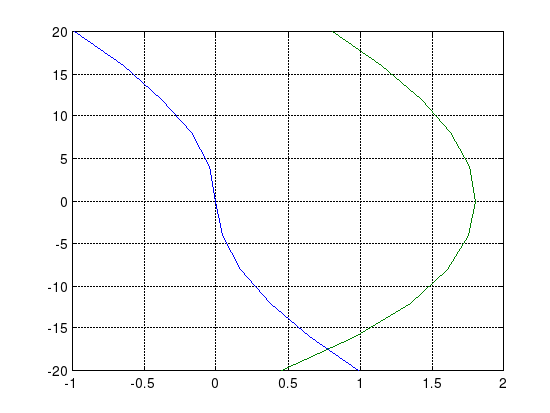
Рис. 1
3.8 Построение структурной схемы и переходного процесса замкнутой системы, оптимальной по быстродействию
Для построения замкнутой, оптимальной по быстродействию системы, используется уравнение (1.33). Структурная схема такой системы приведена на рис. 1. На схеме показано управляющее устройство и управляемый объект. На рис.2 показана переходная характеристика оптимальной по быстродействию системы.
С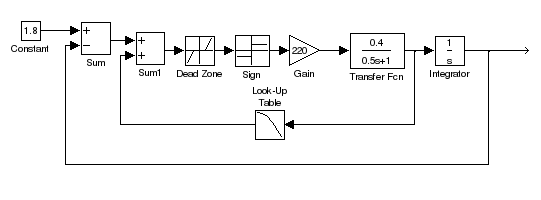 труктурная
схема замкнутой системы, оптимальной
по быстродействию
труктурная
схема замкнутой системы, оптимальной
по быстродействию
Рис. 2
Структурный состав управляющего устройства:
-
Для реализации функции знака (sign) используется релейный элемент без зоны нечувствительности.
-
Для суммирования двух переменных величин используются аналоговые элементы суммирования.
-
В качестве производной ошибки берется производная выходного сигнала перед интегральным звеном.
П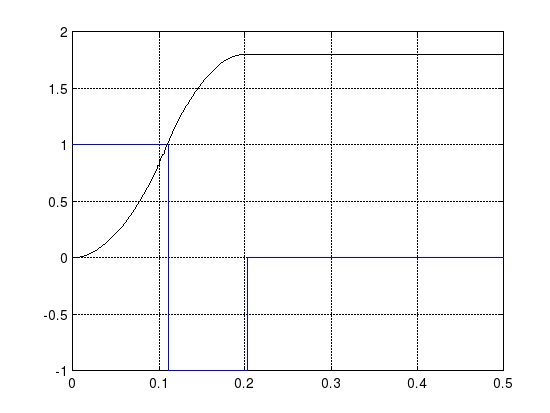 ереходный
процесс оптимальной по быстродействию
системы
ереходный
процесс оптимальной по быстродействию
системы
Рис. 3
Вывод: В ходе выполненной работы научились работать в среде MATLAB. По графику переходного процесса можно убедиться насколько ускоряет переход объекта из начального положения в конечное внедрение контура оптимизации. Исходя из функции переключения видно, что управляющее воздействие должно включать релейное звено.
Литература
-
Пичугин Е.Д. - Методические указания к курсовой работе по дисциплине "Оптимальные и адаптивные системы.- Одесса -1986.
-
Пичугин Е.Д. - Методические указания к лабораторной работе №2 по дисциплине «Оптимальные и адаптивные системы». – ОНПУ, 2000.