

1.2 Приклади задач управління процесами
Виділимо найбільш типові задачі, що вирішуються керуючим пристроєм у ході автоматичного управління технологічним процесом:
-
управління послідовністю подій (комбінаційне, бінарне управління);
-
регулювання одного параметру технологічного процесу;
-
регулювання багатьох незалежних параметрів технологічного процесу;
-
регулювання кількох взаємозалежних технологічних параметрів;
-
взаємопов’язане управління кількома технологічними процесами;
-
управління швидкоплинними процесами, яке критичне до часу його виконання.
Розглянемо деякі з цих прикладів детальніше та розробимо для них відповідні структурні схеми КСУ.
При розробці структурних схем треба врахувати усі апаратні засоби автоматизації, що необхідні для роботи КСУ, а у деяких випадках, і процедури, що реалізовані програмним шляхом у керуючому комп’ютері.
1.3 Управління послідовністю подій
Прикладом такої задачі є організація управління автоматичним верстатом для свердління друкованих плат П (рисунок 1.3), дія якого характеризується такою послідовністю подій:
-
друкована плата пересувається електроприводом Х уздовж однієї координати на задану відстань (спрацьовує датчик координати DX);
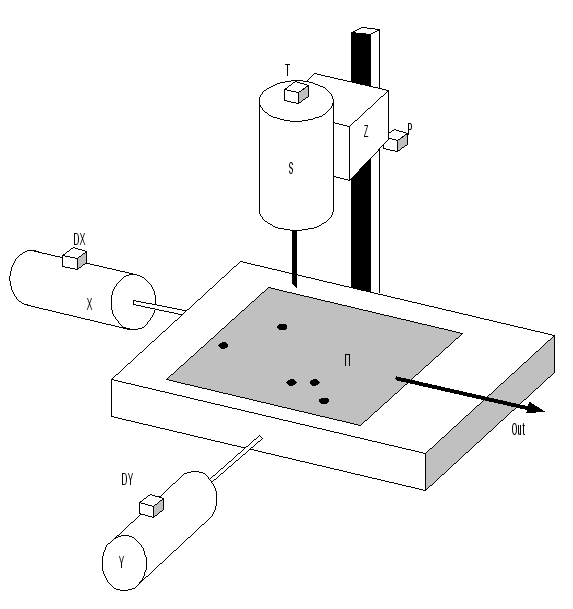
Рисунок 1.3 – Схематичне зображення об’єкту управління
-
плата пересувається електроприводом Y уздовж другої координати на задану відстань (спрацьовує датчик координати DY);
-
включається електропривод свердла S;
-
включається електропривод Z подачі свердла у напрямку плати;
-
очікується момент проходження свердлом матеріалу плати до його торкання металевої основи (спрацьовує електричний датчик торкання Т);
-
вимикається електропривод S;
-
дається команда на реверс електропривода Z (спрацьовує реле реверсу Р);
-
здійснюється повне піднімання свердла;
-
просвердлена плата забирається з верстата (дія “Out”).
З аналізу наукової та навчальної літератури з автоматизації виробництва відомо, що даний технологічний процес є так званим процесом з суворо визначеним порядком операцій типу “включити – виключити”. Такий технологічний процес може бути автоматизованим за допомогою КСУ, яка реалізує комбінаційне управління.
Розробіть відповідну структурну схему цієї ксу.
1.4 Регулювання одного параметру технологічного процесу
На рисунку 1.4 наведений варіант функціональної схеми автоматизації процесу регулювання рівня рідини в технологічному баці.
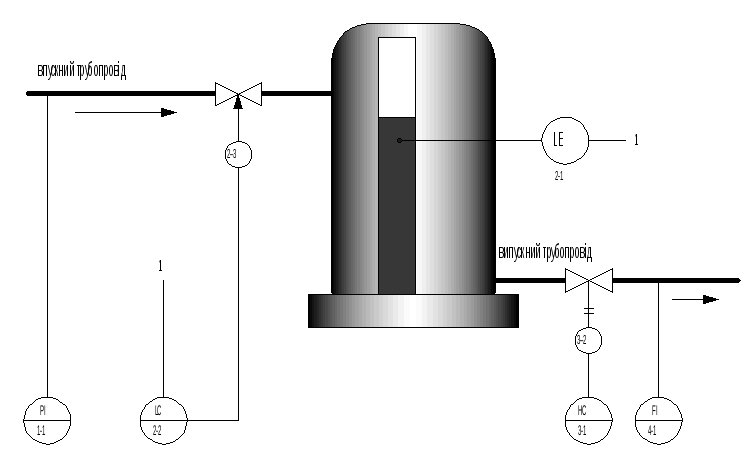
Рисунок 1.4 – Функціональна схема автоматизації процесу регулювання
рівня рідини
Рівень рідини в баці вимірюється датчиком LE, сигнал якого надходить на двохпозиційний регулятор рівня LC. На виході регулятора формується сигнал типу “включити – виключити”. Цей сигнал діє на виконавчий механізм 2-3 вхідного вентиля, який встановлений у впускному трубопроводі. Рідина через вентиль проходить під певним тиском Р до баку. Величина тиску є фактором збурення у процес регулювання рівня. Тому тиск рідини у впускному трубопроводі контролюється за допомогою вимірювача тиску РІ. Витік рідини з баку відбувається через випускний трубопровід, в якому вмонтований вентиль вихідний 3-2. Цей вентиль приводиться до дії вручну від пристрою HC. Витрата рідини у випускному трубопроводі теж є фактором збурення процесу регулювання рівня. Тому витрати рідини контролюються витратоміром FE.