

Розробіть відповідну структурну схему цієї ксу, показавши на ній і програмно реалізований регулятор рівня.
1.5 Регулювання кількох незалежних параметрів
Прикладом такої задачі є регулювання температури в такому об’єкті, яким є офісне приміщення з п’яти кімнат (рисунок 1.5).
В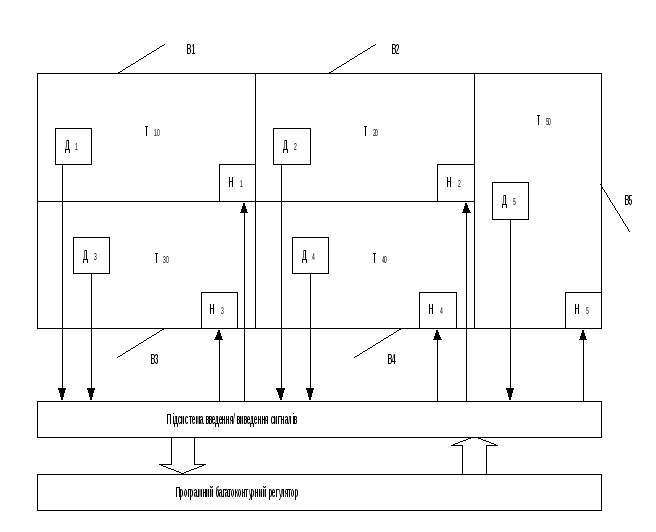 кожній кімнаті необхідно підтримувати
різні значення температури повітря
(Т10,
Т20,
Т30,
Т40,
Т50).
Для цього в них змонтовані нагрівачі
(Н1
– Н5),
які керуються відповідним програмним
регулятором. Зворотний зв’язок для
кожного контуру утворюється за допомогою
системи датчиків температури (Д1
-
Д5).
кожній кімнаті необхідно підтримувати
різні значення температури повітря
(Т10,
Т20,
Т30,
Т40,
Т50).
Для цього в них змонтовані нагрівачі
(Н1
– Н5),
які керуються відповідним програмним
регулятором. Зворотний зв’язок для
кожного контуру утворюється за допомогою
системи датчиків температури (Д1
-
Д5).
Рисунок 1.5 – Загальна схема об’єкту регулювання
Факторами збурення процесу регулювання є неконтрольовані потоки холодного повітря через відкриті вікна В1 – В5.
Програма, що реалізує кожний контур регулювання, повинна враховувати дії цих збурень та вносити корективи до алгоритму управління відповідними нагрівачами.
Розробіть відповідну структурну схему цієї КСУ, показавши на ній і програмно реалізовані регулятори температур.
1.6 Регулювання кількох взаємозалежних технологічних параметрів
Для попереднього прикладу ускладнимо задачу управління, вважаючи, що температура в кожній кімнаті залежить не тільки від роботи її нагрівача і впливу її вікна, а також і від температур повітря в сусідніх кімнатах (завдяки потокам повітря між кімнатами через двері).
Розробіть відповідну структурну схему цієї КСУ, показавши на ній і програмно реалізовані регулятори температур.
1.7 Управління взаємопов’язаними технологічними процесами
Прикладом такої задачі є виробнича автоматична лінія, яка утворюється двома верстатами з числовим програмним управлінням (ЧПУ1 та ЧПУ2) та транспортним роботом Р. На рисунку 1.6 наведена схема цієї лінії.
Роботою кожної із складових цієї лінії (окремим технологічним процесом) управляє окрема програма, але для їх сумісної дії потрібна ще одна програма – диспетчер, яка буде узгоджувати у часі роботу інших програм управління. Це і є приклад взаємопов’язаного управління технологічними процесами, що залежать один від одного.
Деталі Д пересуваються між верстатами за допомогою робота Р тільки при виконанні певних умов: верстат вільний, буфер Б не зайнятий, верстат справний, на початку лінії з’явилася деталь, робот в даний момент не працює і таке інше. Програма – диспетчер аналізує поточний стан лінії і дає накази роботу на виконання тих чи інших пересувань деталей.
Програма – диспетчер повинна керувати всім обладнання автоматичної лінії так, щоб уникнути простоїв верстатів (з метою максимального використання виробничого часу) і не допустити конфліктних ситуацій між взаємопов’язаними процесами (працюючими верстатами та роботом).
Розробіть відповідну структурну схему цієї ксу.
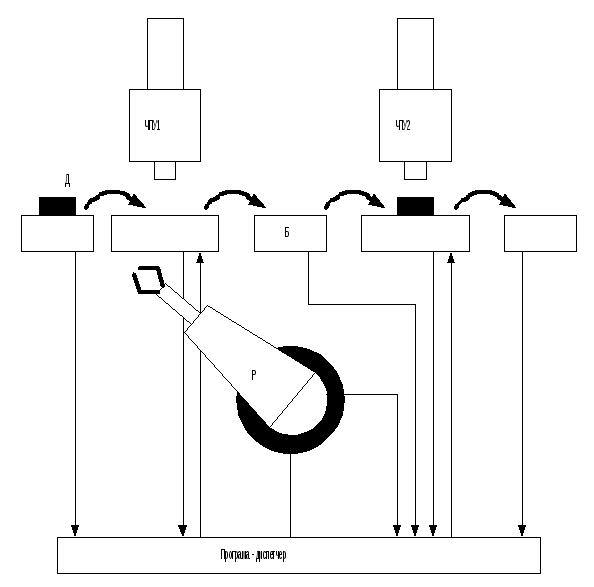
Рисунок 1.6 – Спрощене представлення об’єкту управління