

Ручна установка параметрів регулювання по перехідній функції
Якщо дана перехідна функція об'єкта регулювання або вона може бути визначена, то параметри регулювання можуть бути встановлені згідно з установочними директивам, вказаним в довідниках. Перехідна функція в положенні регулятора «Ручний режим» може бути записана через стрибкоподібне зміна керуючого впливу і характер регульованої величини може реєструватися самописцем. При цьому виходить перехідна функція, що приблизно відповідає вказаній на рис. 6.2.
Хороші середні величини з настановних параметрів багатьох укладачів дають наступні емпіричні формули:
П-регулятор:
Пропорційний коефіцієнт Kp Tg [Tu. Ks]
ПІ-регулятор
Пропорційний коефіцієнт Kp 0,8. (Tg [Tu. Ks])
Час ізодрома Tn 3. Tu
ПІД-регулятор:
Пропорційний коефіцієнт Kp 1,2. (Tg [Tu. Ks]
Час ізодрома Tn Tu
Час попереджання Tv 0,4. Tu
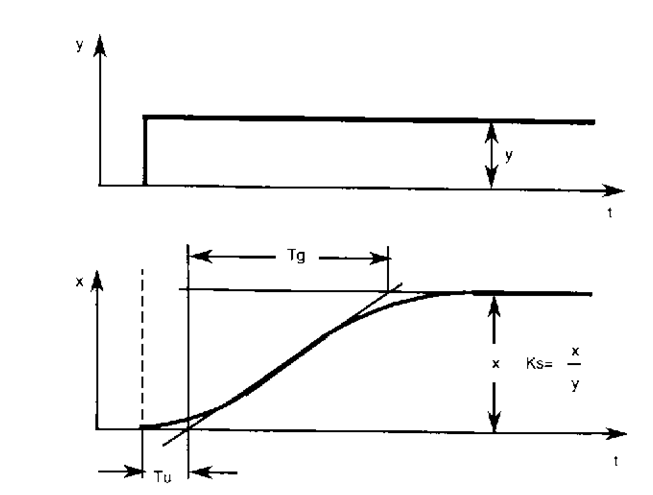

Рис. 6.2 Перехідна функція об'єкта регулювання з вирівнюванням
y -керуючий вплив
w- задає вплив
x- регульована величина
t- час
Tu -час затримки
Tg- час вирівнювання
Ks- передавальний коефіцієнт об'єкта регулювання
Приклад проектування S2 Каскадне регулювання, К-регулятор і S-регулятор
(Внутрішня зворотний зв'язок)
Р егульовані
величини головного регулятора і стежить
регулятора надходять прямо з термометра
опору Pt100
егульовані
величини головного регулятора і стежить
регулятора надходять прямо з термометра
опору Pt100
Головним регулятором є SIPART DR21 з К-виходом, що стежить регулятор має трипозиційний кроковий вихід. Регульовані величини як головного, так і стежить регулятора надходять прямо від термометрів опору Pt100 і під'єднуються в обох приладів до аналогового входу АЕ3. Позиційне квитирование стежить регулятора крокового включення надходить з потенціометра, підключеного на аналоговому вході АЕ4.
Вихідний сигнал головного регулятора є заданою величиною для слідкуючого регулятора і ведеться на його аналоговий вхід АЕ1.
Прохання дотримуватися примітки гол. 7.1 і попереджуючі вказівки гол. 2.1
Установка структурних перемикачів головного регулятора: S1 = 0
S2 = 0
S6 = 4 ... 7
S8 = 4
S15 = 3
S17 = 0
Установка структурних перемикачів стежить регулятора:
S1 = 1
S2 = 2
S6 = 4 ... 7
S7 = 0, 1
S8 = 4
S15 = 3
S17 = 1
S54 = 1
5.Основні функції роботи стенда Ручна установка параметрів регулювання без знання характеристики устаткування

Індикація фактичної й заданої величини
1.Аналогова індикація фактичної величини х
2. Аналогова індикація заданої величини w
3. Цифрова індикація w/x,(можлива індикація наступних величин)
4. Сигнальна лампочка w – горитьпри індикації w
5. Сигнальна лампа х - горить при індикації х
6. Клавіша перемикання для
цифрової індикації w/x,клавіша підтвердження для світлової сигналізації після повернення мережі й клавіша входу на рівень вибору
Зміна керуючого впливу
7. Клавіша зміни керуючого впливу - закрити (відкрити)
8. Клавіша зміни керуючого впливу - відкрити (закрити)
9. Цифрова індикація Y
10.Сигнальна
лампа двійкових виходів ![]() S-Регулятора
S-Регулятора
11.Клавіша перемикання режимів ручний/автоматичний і клавіша «Enter» (Уведення) з рівня вибору в рівень конфігурації
12.Сигнальна лампа ручного режиму
13.Сигнальна лампа режиму y-extern
Зміна заданої величини
14.Клавіша заданої величини зменшення
15.Клавіша заданої величини збільшення
16.Клавіша перемикання заданої величини внутрішня/зовнішня й клавіша «Exit» (Вихід) з рівня конфігурації й вибору урівень обслуговування процесу
17.Сигнальна лампа внутрішньої заданої величини
18.Сигнальна лампа відключення комп’ютера
Параметри регулювання для оптимального регулювання устаткування в цьому випадку ще невідомі. Для утримання регулюючого контуру в стабільному стані є наступні заводські установки:
Пропорційний коефіцієнт Кр = 0,1
Час ізодрому Tn = 9984 сік
Час упередження Tv = oFF
- П-регулятор (сигнал управління Р = high)
-Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.-Необхідна для розузгодження регулювання нуль робоча точка в ручному режимі при Yo = AUto встановлюється автоматично (заводська установка). Робоча точка може бути також задана вручну, для чого необхідно встановити параметр "он-лайн" Yo на бажану робочу точку.
-Перемкнутися на автоматичний режим.
-Повільно збільшувати Кр доки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
-Трохи зменшувати Кр доки коливання не будуть усунені.
- ПД-регулятор (сигнал управління Р = high)
-Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.
-Необхідна для розузгодження регулювання нуль робоча точка в ручному режимі при Yo = AUto встановлюється автоматично (заводська установка). Робоча точка може бути також задана вручну, для чого необхідно встановити параметр "он-лайн" Yo на бажану робочу точку.
-Перемкнутися на автоматичний режим.
-Повільно збільшувати Кр доки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
-Перемкнути Tv з oFF на 1 сек.
-Збільшувати Tv до тих пір, поки коливання не будуть усунені.
-Повільно збільшувати Кр до тих пір, поки знову не з'являться коливання.
-Повторювати установки відповідно до двох попередніх кроків доти,
поки коливання вже не можуть бути усунені.
-Трохи зменшувати Tv і Кр доки коливання не будуть усунені.
- Пі-регулятор (сигнал управління Р = Low)
- Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.
-Перемкнутися на автоматичний режим.
- Повільно збільшувати Кр доки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
- Трохи зменшувати Кр доки коливання не будуть усунені.
- Зменшувати Tn до тих пір, поки регулюючий контур знову не почне хилитися до коливань
- Повільно збільшувати Tn до тих доки ухил до коливань не буде усунений
- ПІД-регулятор (сигнал управління Р = Low)
- Встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль.
- Перемкнутися на автоматичний режим.
- Повільно збільшувати Кр доки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань.
- Перемкнути Tv з oFF на 1 сек.
- Збільшувати Tv до тих пір, поки коливання не будуть усунені.
- Повільно збільшувати Кр доти поки знову не з'являться коливання.
- Повторювати установки відповідно до двох попередніх кроків доти, поки коливання вже не можуть бути усунені.
- Трохи зменшувати Tv і Кр доки коливання не припиняться.
- Зменшувати Tn доти доки регулюючий контур знову не почне хилитися до коливань
- Повільно збільшувати Tn до тих доки ухил до коливань не буде усунений
Приклад проектування К1. Автоматична стабілізація параметра, К-регулятор
Регульована величина через чотири провідний вимірювальний перетворювач

xy
Регульована величина х від вимірювального перетворювача подається на аналоговий вхід АЕ1 реле. Розмах вхідного сигналу складає 0 до 20 мА. Дія, що управляє, також 0 до 20 мА.Живлення вимірювального перетворювача може такожздійснюватися від регулятора (+ на клемі 9 і - на 12)
Установка структурних перемикачів :
S 1 = 0
S 2 = 0
S 4 = 0,1
S56 = 0
Настройка регулятора:
П
рограмуванняKp:
для цього необхідно затиснути клавішу входу на рівень вибору (6)
п
![]()
![]()
н
![]()
![]()
вибору в рівень конфігурації (11) для конфігурації вибрати
параметр із списка onPa для коефіцієнта пропорційності Kp відповідає назва
![]() та
та
![]()
п
![]()
п
![]()
на w/x- індикації задається параметр за допомогою
![]()
![]()
клавіш задавання (14,15) в діапазоні від мінімального значення 0.100 до максимального 100.00
![]()
![]()