

ДВЗ конспекти лекций нова прог
.pdfЯкщо частота обертання збільшується, то швидкість згоряння хоч і зростає, але загальний час для процесу згоряння зменшується; тому найвигідніший кут випередження запалювання збільшуватиметься. Якщо частота обертання зменшується (прикривання дроселя), то кут випередження запалювання Ө також повинен збільшуватися. Це пояснюється тим, що при цьому зменшується коефіцієнт наповнення і збільшується коефіцієнт залишкових газів γг, внаслідок чого зменшується швидкість згоряння робочої суміші. Під час роботи двигуна кут випередження запалювання Ө змінюється автоматично за допомогою відцентрового та вакуумного регуляторів.

Заняття № 8. Кінематика кривошипно-шатунного механізму.
План заняття.
1.Типи кривошипно-шатунних механізмів, основні поняття і позначення ( самостійно )
2.Визначення переміщення, швидкості та прискорення поршня від кута повороту кривошипа.
1.Типи кривошипно-шатунних механізмів, основні поняття і позначення ( самостійно )
Упрактиці конструювання поршневих двигунів внутрішнього згоряння застосовують такі типи кривошипно-шатунних механізмів (КШМ):
а) центральний (аксіальний), в якому вісь циліндра і колінчастого вала лежать в одній площині
(рис.1,а);
Рис.1. Схеми кривошипно-шатунних механізмів
б) дезаксіальний (рис.1,б), в якому вісь циліндра зміщена відносно осі колінчастого вала на деяку величину е , яка називається дезаксажем і не перевищує 10 % величини ходу поршня.
При використанні дезаксіального КШМ є такі переваги:
-збільшується відстань між колінчастим і розподільним валами, а тому збільшується простір для переміщення нижньої головки шатуна;
-перерозподіляється навантаження на ході розширення і стиску, що дозволяє рівномірно зношуватися циліндрам двигуна;
-при однакових радіусах кривошипа до довжини шатуна зростає хід поршня, що забезпечує менше утворення токсичних складових у відпрацьованих газах;
-підвищується при інших рівних умовах робочий об’єм циліндрів двигуна і відповідно потужність.
в) кривошипно-шатунні механізми V- подібних двигунів, в яких нижні головки шатунів можуть безпосередньо з'єднуватися з шатунною шийкою колінчастого вала (рис.15.1,в) або один шатун, який називається причіпним, може приєднуватися до нижньої головки другого шатуна
(рис.1,г).
Різновидом центрального КШМ є механізм зі зміщенням (1,5...2 мм) осі поршневого пальця відносно осі циліндра проти напрямку обертання колінчастого вала. Більш докладно розглянемо
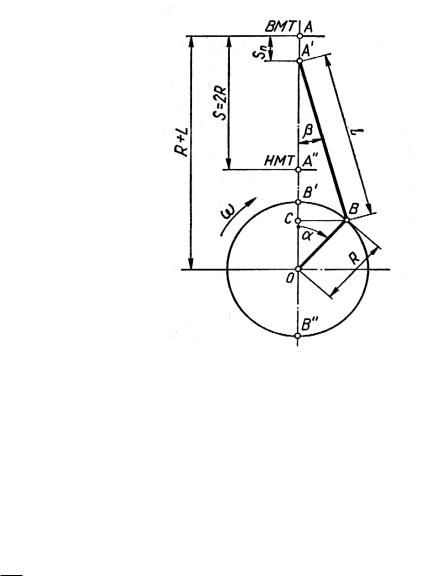
схему центрального кривошипно-шатунного механізму (рис.15.2), який в нинішній час найбільш поширений в автомобільних двигунах. На цій схемі приведені основні позначення:
Рис.2. Схема центрального КШМ
А - вісь поршневого пальця; В - вісь шатунної шийки; |
О - вісь колінчастого вала; |
А' - верхня мертва точка; А" - нижня мертва |
точка; Sx - поточне переміщення |
поршня; |
|
- кут повороту кривошипа (ОВ), який відраховується від осі циліндра (А'О) в напрямку обертання колінчастого вала за годинниковою стрілкою;
- кут відхилення осі шатуна (АВ) від осі циліндра;
- кутова швидкість обертання колінчастого вала; R = ОВ - радіус кривошипа;
S =2R - хід поршня; Lш= АВ - довжина шатуна.
R - відношення радіуса кривошипа до довжини шатуна - величина, яка характеризує
Lш
геометричні розміри КШМ(0,24…0,31).
2 .Кінематичний розрахунок КШМ
Кінематичний розрахунок КШМ зводиться до визначення переміщення, швидкості та прискорення поршня. При цьому приймається, що колінчастий вал абсолютно жорсткий і його обертання проходить з постійною кутовою швидкістю
n . Хв-1
30
де n - частота обертання колінчастого вала, Хв-1 .
Переміщення поршня двигуна з центральним КШМ можна визначити за наступною залежністю:
Sx = АО – А1 О = ( R+L) – (Rcos +L cos ), використавши теорему синусів і біном
Ньютона після математичних перетворень, отримаємо:
Sx = R [(l-cos ) + 4 (l-cos2 )], м. (15.1)
Переміщення поршня можливо представити, як суму двох гармонічних переміщень першого і
другого порядку: Sx = Х = Х1 + Х2
Х1 = R(1- cos ) – переміщення поршня при нескінченно довгому шатуні ( Lш= ∞, коли = 0);

Х2 = R 4 (1- cos2 ) – поправка до переміщення поршня першого порядку на кінцеву довжину
шатуна.
За цим рівнянням можна побудувати графік переміщення поршня (рис.15.3,а), з цього графіка видно, що при повороті кривошипа на кут від 0о до 90о поршень проходить шлях більший, ніж при повороті кривошипа на кут від 90о до 180о. Це пояснюється тим, що поршень рухається під дією переміщення кривошипа і відхилення шатуна. При цьому, якщо до 90о ці переміщення додаються, то після 90о вони від’ємні.
Розрізняють середню і миттєву швидкість поршня:
Середня швидкість поршня Vп. с. = S n , м/с (10…15 м/с) (15.2)
30
Миттєву швидкість поршня, або швидкість в будь-який заданий момент часу, можна визначити як першу похідну від переміщення за часом:
Vп = dSx dt
Щоб знайти залежність швидкості поршня від кута поворота кривошипа права частина виразу множиться і ділиться на d
Vп = |
dSx |
|
d |
; |
де |
d |
- зміна кута повороту кривошипа за часом, що являє собою кутову |
dt |
|
d |
dt |
швидкість, тобто d = ; тому Vп = dSx dt dt
Продиференціювавши рівняння переміщення поршня за кутом повороту кривошипа отримаємо рівняння миттєвої швидкості:
Vп = R ( sin +0.5 sin2 ) , м/с. (15.3).
За цим рівнянням можна побудувати графік швидкості поршня (рис.3,б)
Аналогічно переміщенню поршня швидкість поршня можливо представити сумою двох гармонічних складових першого і другого порядку
Vп1 = R sin - швидкість поршня при нескінченно довгому шатуні ( Lш= ∞, коли = 0); Vп2 = R 0.5 sin2 – поправка до швидкості поршня першого порядку на кінцеву довжину
шатуна.
Максимальне значення швидкості поршня досягається при куті повороту кривошипа менше 90о , а при русі в зворотному напрямку – при куті більше 270о, значення кутів залежить від .

Рис.3. Графічне зображення переміщення а, швидкості б і прискорення поршня в .
Знаходимо кут при, якому буде максимальне значення швидкості поршня
= arcos( |
|
1 8 2 |
1 |
) |
|
|
|
4 |
|
|
|
||
мах |
|
|
|
|
|
|
|
|
|
|
|
|
|
Визначене значення кута |
підставляємо у формулу (8.2) при (0,2…0,3) |
|
= 75…80о |
|||
мах |
|
|
|
|
|
мах |
Середнє статистичне значення максимальної швидкості поршня дорівнює Vпмах = 1,62 Vп. с
Прискорення поршня є першою похідною від швидкості поршня Миттєве прискорення поршня, або прискорення в будь-який заданий момент часу, можна
визначити як першу похідну від швидкості за часом:
Jп = dvп dt
Щоб знайти залежність прискорення поршня від кута поворота кривошипа права частина
виразу множиться і ділиться на d |
|
|
|
|
|
|
|||||
Jп = |
dvп |
|
d |
; де |
d |
- |
зміна кута повороту кривошипа за часом, що являє |
||||
|
|
|
|
|
|||||||
dt |
|
d |
|
dt |
|||||||
собою кутову швидкість, тобто |
d |
= |
, тому Jп = |
dvп |
|||||||
|
|
|
|
||||||||
dt |
|
dt |
|||||||||
|
|
|
|
|
|
|
|
|
|||
Продиференцювавши рівняння швидкості поршня за кутом повороту кривошипа отримаємо: Jп = R 2 (cos + cos2 ), м/с2. (15.4)
За цим рівнянням можна побудувати графік прискорення поршня (рис.15.3,в)
Jп1 = R 2 cos – прискорення поршня при нескінченно довгому шатуні ( Lш= ∞, коли =
0);
Jп2 = R 2 cos 2 поправка до прискорення поршня першого порядку на кінцеву довжину шатуна.
Із аналізу рівняння (8.3) і графіка прискорення можливо встановити, що поршень має
екстремальне значення при |
= 0о у ВМТ, тоді Jпмах = R 2 (1 + ), |
при = 180о у НМТ |
Jпмах180 = -R 2 (1 - ) |
Мінімальне значення прискорення поршня Jп = 0 буде при максимальній швидкості. |
|
При = 0,25 крива Jп має опуклу форму у бік осі . При < 0,25 крива Jп має випуклу
форму.
Максимальне прискорення поршня = 10 000м/с2
Відношення поршня до діаметра циліндра. Хід поршня S діаметр циліндра D, основні розміри циліндра двигуна. В автомобільних двигунах D = 70…130 мм. Відношення S/D є одним із основних параметрів визначаючих розміри і масу двигуна. В сучасних двигунах відношення S/D =
0,8…1,2.
Коли S/D > 1, двигуни називаються довгохідними; при S/D < 1 – двигуни називають короткохідними.
У високо обертових двигунів S/D бажано зменшувати для утримування помірної швидкості поршня, збільшення механічного ККД, зниження розмірів в напрямку вісі циліндрів і підвищення жорсткості колін валу.

Заняття № 9. ДИНАМІКА КРИВОШИПНО-ШАТУННОГО МЕХАНІЗМУ.
План заняття.
1. Зведення мас деталей кривошипно-шатунного механізму.
2. Сумарні сили і моменти, що діють в КШМ одноциліндрового двигуна
У процесі роботи двигуна деталі кривошипно-шатунного механізму переміщуються із значними швидкостями і прискореннями, внаслідок чого на них діють великі навантаження, знати, які потрібно для виконання надійних розрахунків.
Основними силами, що діють на деталі кривошипно-шатунного механізму працюючого двигуна, є:
-сили тиску газів;
-сили інерції рухомих мас;
-сили тертя.
Вивчення цих сил зводиться кінець-кінцем до вміння аналітично або графічно визначити їх абсолютну величину, яка необхідна для розрахунку на міцність і визначення навантажень на підшипники.
1. Зведення мас деталей кривошипно-шатунного механізму.
1.1 Зведення маси шатунної групи.
Під час роботи двигуна маса деталей поршневої групи (поршень, кільця, поршневий палець і заглушки, або стопорні кільця) mп.г. – здійснює зворотно-поступальний рух.
Маса шатуна mш - здійснює складний плоско-паралельний рух. Маса кривошип mк- здійснює обертальний рух.
Для спрощення динамічних розрахунків двигуна масу шатуна замінюють двома масами тшп і тт.к зведеними до верхньої і нижньої головок шатуна (рис.16.1.).
Рис.1. Схема зведення шатуна: а) дійсного шатуна, б) зведеного шатуна.
Маса шатуна вище цента ваги шатуна mш.п – розташована на осі поршневого пальця, маса шатуна нижче цента ваги шатуна mш.к –розташована на осі шатунної шийки.
Теоретично для отримування динамічно замінної системи потрібно виконати такі умови: 1.Маси дійсного і зведеного шатунів незмінні, тобто
mш = mш.п. + mш.к.
2. Незмінність центра ваги шатуна дійсного і зведеного, тобто
mш.п.L ш.п. = mш.к. L ш.к.
3. Момент інерції відносно центра ваги дійсного і зведеного шатунів незмінний, тобто
Σ mil2i = Iш
Значення замінюючи мас приймаємо обернено пропорційно відстані від центра ваги шатуна до осей верхньої і нижньої головок шатуна.
mш.п. = mш L ш.к. /Lш , кг mш.к. = mш L ш.п. /Lш, кг
Середньостатистичні формули визначення мас mш.п. і mш.к. mш.п. = (0,2…0,3) mш, кг

mш.к. = (0,7…0,8) mш, кг
1.2. Зведення маси кривошипа незрівноважену масу кривошипа замінюють одною приведеною масою з дотриманням умов рівноваги. Еквівалентну масу зводять до радіуса кривошипа R і позначають mк, масу шатунної шийки mш.ш приймають на осі шатунної шийки і зведення її не потрібно..
Рис. 2. Схема зведення кривошипа: а) дійсна; б) еквівалентна.
Масу щоки mщ з центром ваги на відстані від осі колінчастого валу заміняють зведеною масою (mщ )R при цьому повинно виконуватися правило:
mщ = (mщ )R R, звідси (mщ )R = mщ /R, кг
Зведення маси mк всього кривошипа визначається сумою мас шатунної шийки и щік mк = mш.ш + 2(mщ )R = mш.ш + 2 mщ /R
1.3. Еквівалентні схеми КШМ Після зведення мас КШМ її можливо представити у вигляді системи, яка складається з двох мас з’єднаних жорстким невагомим елементом.
Рис. 3 Еквівалентні схеми КШМ, рядного і V- подібного двигунів.
1.3.1. Визначення сумарної маси еквівалентної схеми рядного КШМ.
Маса mj являє собою сумарну масу деталей, що здійснюють зворотно – поступальний рух.
mj = mп.г. + mш.п.
Маса mR являє собою сумарну масу деталей, що здійснюють обертовий рух. mR = mк. + mш.к.
1.3.2 Визначення сумарної маси еквівалентної схеми V- подібного КШМ.
У V- подібного КШМ з коліном валу з’єднано два шатуна протилежних циліндрів.
Маса mj являє собою сумарну масу деталей, що здійснюють зворотно – поступальний рух.
mj = mп.г. + mш.п.
Маса mR являє собою сумарну масу деталей, що здійснюють обертовий рух. mR = mк. +2 mш.к.

2. Сили і моменти, які діють в кривошипно – шатунному механізмі одноциліндрового двигуна.
2.1. Сили тиску газів. (самостійно)
Сили тиску газів у циліндрі двигуна залежно від ходу поршня визначають за індикаторною діаграмою, побудованою за даними теплового розрахунку.
Силу тиску газів на поршень визначають за формулою
Pг = рг Fn[H],
де рг— тиск газів у циліндрі при відповідному положенні поршня, мПа; Fn — площа поршня, м2.
При динамічному розрахунку двигунів частіше користуються графічним зображенням сил, що діють у кривошипно-шатунному механізмі.
2.2. Сили інерції .( самостійно)
Отримана вище двох масова система, що динамічно замінює КШМ, в якій одна маса здійснює зворотно – поступальний рух, дозволяє достатньо просто визначити сили інерції, що діють на деталі КШМ. Сили інерції,що діють на деталі КШМ, зводимо до двох сил: силі інерції Fj від зворотно – поступально рухомих мас КШМ і відцентрової сили інерції Kr від обертових мас КШМ. Сила інерції Fj дорівнює добутку маси на прискорення і діє повздовж осі циліндра. Вона може бути направлена вгору, або вниз відносно осі колінчастого валу. Сила інерції.
Fj = - mj Jп ,(н)
Підставивши значення прискорення поршня, отримаємо
Fj = - mj r 2 ( cos + cos 2 ),(н), коли (- mj r 2 ) = C
Fj = C ( cos + cos 2 ) = C cos + C cos 2 . Для зручності досліджень силу Fj представимо у вигляді двох сум складових: Fj = Fj1 + Fj11 , тоді
Сила інерції першого порядку дорівнює Fj1 = C cos . Сила інерції другого порядку дорівнює Fj11 = C cos 2 .
Сили Fj1 і Fj11 змінюються по гармонічному закону в залежності від кута повороту кривошипа колін валу. Величину і напрямок цих сил в любий момент часу можливо знайти, шляхом обертання векторів.
Сила Fj1 визначається, як проекція на вертикальну вісь вектора С, що обертається із кутовою швидкістю ;
Сила Fj11 визначається, як проекція на вертикальну вісь вектора С, що обертається із кутовою швидкістю 2 .
Графічна побудова сил інерції Fj1 і Fj11 методом обертання векторів і суми Fj цих сил показано на рис. 16.4.
Рис. 4. Схема для побудови залежності сил інерції Fj від кута повороту кривошипа.
На діаграмі рис. 16.5 а і б видно, що сила інерції першого порядку Fj1 міняє знак при кутах повороту кривошипа 90о і 270о, сила інерції другого порядку Fj11 має позитивне значення при повороті кривошипа від 45о і 135о і від 225о і 315о при інших положеннях кривошипа сила Fj11 буде негативною.
2.3. Сила інерції обертових мас. (самостійно)
Відцентрова сила інерції обертових мас КШМ Кr, прикладена до центру шатунної шийки колін вала (рис. 16.5. в) постійна по величині і направлена повздовж радіуса кривошипа.
Сила Кr = (mк +mш.к.) r 2 = mr r 2, (н), де - mr = mк +mш.к –маса обертових деталей КШМ.

Рис. 5. Діаграма сил: а - для Fj1; б - для Fj11; в – для Кr
2.4. Сумарні сили і моменти, що діють в КШМ одноциліндрового двигуна.
Повну уяву об умовах, що діють в елементах КШМ, можливо отримати в наслідок розгляду разом сили тиску газів та сил інерції рухомих мас у розрахунковому режимі.
Вихідною силою є сумарна сила F , що діє на поршень, яка являє собою векторну суму сил Fг і
Fj:
F = Fг + Fj
Рис. 6. Схема сил, які діють в КШМ одноциліндрового двигуна.
Сумарна сила F змінна по велечині і напрямку в залежності від кута повороту кривошипа може бути направлена до осі колінчастого валу або від неї. Сумарну силу F що діє повздовж осі
циліндра ( рис. 6. ) розкладаємо на дві складових: силу N, перпендикуляра до стінки циліндра, і силу S, яка направлена повздовж осі шатуна. Сила N – бічна сила – притискає поршень о стінки циліндра і обумовлює знос їх поверхонь. Сила S стискає, або розтискає шатун.
Перенесемо силу S по напрямку дії в центр шатунної шийки, позначивши S′, та розкладемо на дві складові: нормальну ( радіальну ) силу К, що направлена повздовж радіуса кривошипа,
К= S cos ( + ) , (н)
Ітангенціальну силу Т′, дотичну до кола, яке описує радіус кривошипа,
Т= S sin( + ) , (н)
Для подальшого дослідження динаміки КШМ нормальну силу перенесемо по лінії дії в центр корінної шийки і позначимо К′ . Одночасно до центру вала прикладемо дві взаємно протилежних сили Т′ і Т′′, рівні по величині і паралельні по напрямку тангенціальній силі Т. Сили Т і Т′′ утворюють пару сил на плечі r, які замінюють крутним моментом -Мкр
Крутний момент дорівнює : Мкр = Т r, (н м)
Сили К′ і Т′ складемо і отримаємо результуючу S′′ рівну по величині і напрямку силі S, діючій по осі шатуна. Сила S′′ навантажує корінні підшипники колінчастого валу.
Силу S′′ також розкладаємо на дві складові : N′ і F′ перша N′ діє перпендикулярно осі циліндра, а друга по осі циліндра F′ . Сили N і N′ на плечі h утворюють перевертальний момент :