

Теоретичні відомості з теми: Розширення межі вимірювань приладів магнітоелектричної системи.
Робота механізмів магнітоелектричної системи заснована на взаємодії магнітного потоку постоянного магніта і струму, що проходить по котушці (рамці). Обертаючий момент, що виникає при цьому, відхиляє рухому частину механізму щодо нерухомої. Залежно від того, який з вказаних елементів (постійний магніт або рамка) є рухомою частиною, розрізняють механізми з рухомою рамкою і зрухомим магнітом.
Магнітний ланцюг вимірювального механізму із зовнішнім магнітом (мал. 5.2) складається з сильного постійного магніта 1, полюсних наконечників з циліндровою обмоткою 2, магнітопроводу з розточуванням 3, циліндрового сердечника 4 і магнитопровода 5, виконаних з магнитомягкого матеріалу.

Мал. 5 2. Магнітоелектричний механізм із зовнішнім магнітом
У повітряному зазорі між сердечником і полюсними наконечниками створюється сильне, практично рівномірне радіальне магнітне поле.
Рухома частина механізму 2 є котушкою (рамку) прямокутної форми
з тонкого мідного або алюмінієвого дроту, намотаного на алюмінієвий каркас (або без каркаса), яка може повертатися навколо сердечника в магнітному полі. До рамки з двох сторін приклеюються алюмінієві букси для закріплення розтяжок або кернів. Урівноваження рухомої частини здійснюється важками 6. Стрілка 7 і циферблат з шкалою утворюють відліковий пристрій.
Вимірюваний
струм I
підводиться
до обмотки рамки через дві розтяжки 8
або
дві спіральні пружини (якщо рамка
кріпиться на кернах), які створюють
протидіючий момент Мпр. 
Протидіючий момент пропорційний куту закручування пружин, або, що те ж, куту повороту рухомої частини атобто Мпр——wa, де W — питомий протидіючий момент, постійний для даного пристрою.
При протіканні по обмотці рамки постійного струму I на рамку діє пара сил t—F, що створює момент М, що обертає:
 (5.6)
(5.6)
де WM — енергія магнітного поля; dWм — приріст енергії магнітного поля; da — кут повороту.
При повороті рамки на кут da в рівномірному радіальному магнітному полі зміна потокосцепления рівна:
де В — магнітна індукція в повітряному зазорі; / — довжина активної сторони витка; Ъ — середня ширина обмотки рамки; w — число витків рамки; s=bl— активна площа рамки.
Підставивши dW в (5.6), отримаємо:

де Wo=Bsw — зміна потокосцепления обмотки рамки при повороті її на кут а, рівний 1 радий.
Стале відхилення рухомої частини визначається рівністю М=— Мпр або 4roI=Wa9 звідки витікає рівняння перетворення
 (5.7)
(5.7)
де S'I =a/I — чутливість механізму до струму. Нагадаємо, що чутливість механізму відрізняється від чутливості приладу (див. § 1.4).
З (5.7) витікає, що відхилення рухомої частини пропорційне струму, тобто прилад має рівномірну шкалу.
Для регулювання номінального кута відхилення в механізмах є магнітний шунт 9. Це пластинка з магнитомягкого матеріалу, через яку проходить частина магнітного потоку. Переміщаючи її, можна регулировать магнітний потік, що відгалужується в магнітний шунт, і тим самим змінювати магнітну індукцію в повітряному зазорі.
Заспокоєння в магнітоелектричних
механізмах магнитоиндукционное, але
без застосування спеціальних заспокоювачів.
Момент магнитоиндукционного заспокоєння
рухомої частини з каркасною рамкою
визначається взаємодією магнітного
потоку з вихровими струмами, що виникають
в алюмінієвому каркасі при русі рухомої
частини в полі постійного магніта.Залежно
від класу точності і конструкції приладу
застосовуються різні конструкції
магнітного ланцюга. Від магнітного
ланцюга потрібне забезпечення постійності
індукції в часі, при зміні температури,
за наявності зовнішнього магнітного
поля і тому подібне Постійні магніти
виготовляються з високоякісних сплавів
заліза, нікелю, алюмінію і кобальту, що
забезпечують індукцію 0,15—0,3 Тл.
На мал. 5.S, а—д зображені найбільш типові конструкції магнітних ланцюгів (на мал. 5.3, а—г системи

Мал. 5 3 Конструкції магнітних ланцюгів.із зовнішнім магнітом, на мал. 5.3, д — з внутрішнім магнітом) .
У механізмах з внутрішньорамковим магнітом (мал. 5.3, д) нерухомий постійний магніт I укріплений вну- три рамки 2, активні сторони якої знаходяться між полюсними черевиками 3 і магнітопроводом 4 з магнитомягкого матеріалу. Перевагою такої конструкції є краще використання магнітної енергії магніта, що дозволяє створювати мініатюрні прилади.
Існують магнітоелектричні механізми, у яких рухомою частиною є постійний магніт, що обертається усередині нерухомої котушки. Проте прилади з такими механізмами застосовуються рідко.
Магнітоелектричні механізми,
вживані в амперметрах і вольтметрах,
володіють порівняно великим моментом
інерції рухомої частини і можуть
застосовуватися тільки на постійному
струмі. При пропусканні по обмотці рамки
струму i=Imsinwt, середнє
значення якого за період рівне нулю,
повороту рухомої частини не відбудеться,
оскільки середнє за період значення
моменту, що обертає, також рівне нулю.
Дійсно, миттєве значення моменту т=,
що обертає
 а
його середнє значення рівне:
а
його середнє значення рівне:
Якщо крива змінного струму має постійну
складову, то рухома частина обернеться
на кут, обумовлений цією складовою.
крива змінного струму має постійну
складову, то рухома частина обернеться
на кут, обумовлений цією складовою.
Температурні впливи на механізм можуть бути унаслідок як виділення теплоти в обмотці рамки від робочого струму, так і зміни температури зовнішнього середовища. При підвищенні температури зменшуються питомий протидіючий момент спіральних пружин і розтяжок (приблизно на 0,3—0,4% на 10° З) і магнітний потік постійного магніта (приблизно на 0,2—0,3% на 10° З). Ці чинники в деякій мірі компенсують один одного. З підвищенням температури зростає опір обмотки рамки, що унаслідок великого температурного коефіцієнта міді або алюмінію (4% на 10° З) і залежно від схеми включення механізму може викликати значні зміни свідчень. Достоїнствами магнітоелектричного механізму в порівнянні з іншими механізмами є велика чутливість, мале власне споживання мощ- ности, малий вплив зовнішніх магнітних полів завдяки сильному власному магнітному полю, пряма пропорційність між струмом в обмотці рамки і кутом відхилення.
Недоліки магнітоелектричних механізмів — складність конструкції, висока вартість, а також чутливість до перевантажень і змін струму.Завдяки відміченим достоїнствам магнітоелектричні прилади із зовнішнім і внутрішнім магнітами є найбільш точними: мають класи точності 0,1 і гірше. Температурні погрішності приладів компенсуються за допомогою спеціальних схем.


Мал. 5.4, Магнітоелектричнийлогометрический механізм.
Магнітоелектричні прилади
знаходять широке застосування як
амперметри і вольтметри постійного
струму з межами вимірювань від наноампер
до кілоампер і від доль милливольта до
кіловольт, гальванометрів постійного
струму, гальванометрів змінного струму
і осцил-лографических гальванометрів;
у поєднанні з різного роду перетворювачами
змінного струму в постійний вони
використовуються для вимірювань в
ланцюгах змінного струму.
Широке застосування знаходять також логометрические магнітоелектричні механізми. У магнітоелектричних логометрических механізмах (мал. 5.4) в полі постійного магніта 1 знаходиться рухома частина з двох жорстко укріплених на осі рамок 2, Пружини, що створюють протидіючий момент, тут не потрібні. Струми 11 і 12 підводяться до рамок за допомогою «без-моментных» токоподводов. Протидіючі моменти, обумовлені ними, малі, і їх можна не враховувати, при цьому на рамки діють моменти, направлені в протилежні сторони (один можна вважати таким, що обертає, а другой—противодействующим). Форма сердечника 3 і полюсних наконечників 4, виконаних з магнитомягкого матеріалу, вибирається такий, щоб індукція в повітряному зазорі була нерівномірною і направленной
нерадіально. Індукція в місцях розташування активних сторін рамок відповідно рівна: B1 = =f1(a) і B2=f2(a), тоді моменти, що діють на рухому частину, можна виразити таким чином:
 (5.8)
(5.8)
Рухома частина займає положення сталого відхилення, відповідне умові М1=—м2
 (5.9)
(5.9)

Практичне заняття
№ 5

Тема: Розширення межі вимірювань приладів магнітоелектричної системи.
Мета: Розрахувати опір шунта до амперметра і додаткового резистора до вольтметра магнітоелектричної системи. З розрахунків зробити шунт і додатковий резистор. Перевірити і відрегулювати електровимірювальні прилади з шунтом і додатковим резистором.
Прилади та обладнення:
1. Амперметр і вольтметр магнітоелектричної системи.
2. Міліамперметр магнітоелектричної системи.
З. Зразкові прилади: амперметр, вольтметр,міліамперметр, магнітоелектричноїсистеми.
4. Набір різноманітних шунтів і додаткових резисторів.
5. Магазини опіру.
б. Реостат дротовий.
7. 3'днальні провідники.
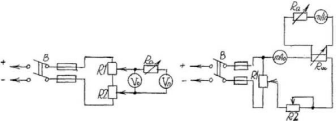
Схема
вимірювань:
1. Підготовка до виконання випробувань.
1.1 Ознайомитись з вимірювальними приладами. Визначити: величину внутрішнього опору, струм повного відхилення указувача і номінальну напругу.
1.2 Розрахувати опір шунта Rш до амперметра магнітоелектричної системи. Межу вимірювань призначає викладач.
Розрахунки виконують по формулам:

де, я - шунтіруючий..., Rш - опір шунта.
1.3 Ознайомитись з конструкцією шунтів.
1.4 Розрахувати опір додаткового резистора RД. до вольтметра магнітоелектричної системи. Межу вимірювань призначає викладач. Розрахунки виконують по формулам:


де, m - ... розширення межі вимірювань, Rn- внугрішній опір пршіада
1.5 Ознайомитись з конструкцією додаткових резисторів.
1.6 Зібрати схему вимірювань,:з'еднуючи амперметр з шунтом, а додатковий резистор з вольтметром.
1.7 Занести в таблицю 1 основні технічні данні приладів.