

2.2 Порядок виконання роботи
Одержати завдання на лабораторну роботу у викладача.
Увійти в програмне середовище DOS.
Написати текст програми в текстовому редакторі та зберегти його з розширенням *.asm в каталозі C:\CPU\TASM\WORK.
Відкрити каталог C:\CPU\TASM\WORK.
У командному рядку набрати: ta (ім’я файла) без розширення *.asm.
Виконати асемблерування та компонування файла.
Перевірити правильність виконання програми. Виконати редаґування файла.
Ознайомитися з інтерфейсом та з меню програми.
Вийти коректно з програмного середовища.
2.3 Зміст звіту
Титульна сторінка.
Найменування та мета лабораторної роботи.
Короткі теоретичні відомості.
Отримане у викладача завдання (текст програми з докладними коментарями).
Опис виконання кожного пункту завдання.
Письмові відповіді на контрольні питання.
2.4 Контрольні запитання
Проаналізувати існуючі формати даних і системи команд для МП К1810ВМ86.
Система команд МП К1810ВМ86. Група команд пересилання даних.
Система команд МП К1810ВМ86. Група команд арифметичних і логічних операцій.
Система команд МП К1810ВМ86. Група команд передачі керування.
Пояснити призначення ознак, формованих МП К1810ВМ86.
Опишіть склад команди асемблера для МП К1810ВМ86. Призначення кожного з полів команди.
Які способи адресації використовуються в програмах для МП К1810ВМ86?
Які види прямої адресації для МП К1810ВМ86 ви знаєте, чим вони відрізняються один від одного?
Пояснити в чому полягають особливості непрямої адресації.
Порівняйте довжину команд, що використовують пряму адресацію і непряму адресацію.
Лабораторна робота №3 вивчення системи команд мп к1810вм86, команди логічних операцій, команди організації переривань. Організація програмних циклів
|
Мета роботи. |
Освоїти лінійне програмування мовою асемблера для процесорів К1810ВМ86. Вивчити команди логічних операцій, команди переривань. |
3.1 Теоретичні відомості
Разом із засобами арифметичних обчислень система команд мікропроцесора має також засоби логічного перетворення даних. Під логічними розуміються такі перетворення даних, в основі яких лежать правила формальної логіки. Формальна логіка працює на рівні тверджень «істинно» й «помилково». Для мікропроцесора це, як правило, означає 1 і 0 відповідно.
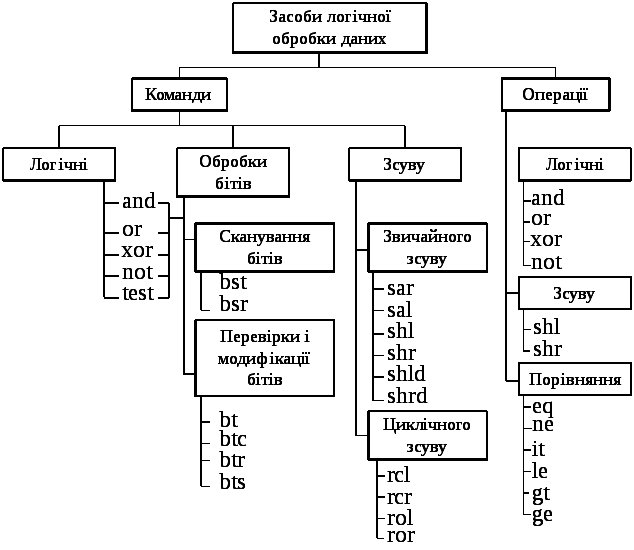
Рис. 3.1 - Засоби системи команд мікропроцесора для роботи з логічними даними
До засобів логічного перетворення даних відносяться логічні команди і логічні операції. На рис. 3.1 показані засоби мікропроцесора для організації роботи з даними за правилами формальної логіки.
; установка переривання
PUSH DS ;зберігаємо DS
MOV DX,OFFSET ROUT ;зсув для процедури в DX
MOV AX.SEG ROUT ;сеґмент процедури
MOV DS.AX ;розміщуємо в DS
MOV AH.25H ;функція встановлення вектора
MOV AL,60H ;номер вектору
INT 21H ;змінюємо переривання
POP DS ;відтворюємо DS
; процедура переривання
ROUTINE PROC FAR
PUSH AX ;зберігаємо всі змінені реґістри
POP AX ;відтворюємо реґістри
MOV AL,20H ;ці два рядки треба використовувати
OUT 20H,AL ;тільки для апаратних переривань
IRET
ROUTINE ENDP
Коли програма завершується, повинні бути встановлені оригінальні вектори переривань. Наступна програма може викликати дане переривання і передати керування на те місце в пам'яті, у якому процедури користувача вже немає. Наприклад:
; - в сеґменті даних:
KEEP_CS DW 0 ;зберігає сеґмент заміненого переривання
KEEP_IP DW 0 ;зберігає зсув переривання
; - на початку програми
MOV AН, 35h ;функція одержання вектора
MOV АL,1Сh ;номер вектора
INT 21h ;тепер сеґмент у DS
;- зсув в ВХ
MOV KEEP IP,ВХ ;запам’ятовуємо зсув
MOV KЕEP_CS,ES ;запам’ятовуємо сеґмент
;- в кінці програми
CLI
PUSH DS ;DS ;буде зруйнований
MOV DX,KEEP_IP ;підготовка до відтворення
MOV AX.KEЕP_CS
MOV DS.AX ;підготовка до відтворення
MOV АН, 25h ;функції встановлення вектора
MOV АL,1Сh ;номер вектора
INT 21h ;відтворюємо вектор
POP DS ;відновлюємо вміст сеґменту DS
STI