

ТММ Улан
.docx
Министерство образования и науки Республики Казахстан
Карагандинский Государственный Технический Университет
Кафедра ВМиМ
|
КУРСОВОЕ ПРОЕКТИРОВАНИЕ |
по_________________________________________
(наименование дисциплины)
Тема: _____________________________________________
__________________________________________________
Принял:

_________
(оценка) (фамилия, инициалы)

(подпись) (дата)
Члены комиссии: Выполнил:

__________________
(подпись, фамилия, и.о.) (фамилия, инициалы)
______________________ ________________
(подпись, фамилия, и.о.) (группа)
 Караганда
2015
Караганда
2015
Введение
Развитие современной науки и техники неразрывно связано с созданием новых машин, повышающих производительность и облегчающих труд людей, а также обеспечивающих средства исследования законов природы и жизни человека.
Целью создания машины является увеличение производительности и облегчения физического труда человека путем замены человека машиной. В некоторых случаях машина может заменять человека не только в его физическом, но и в умственном труде. Так, например, счетно-решающие машины заменяют человека или помогают ему в проведении необходимых математических операций, информационные машины обрабатывают большое количество заложенных в них человеком сведений и дают ему требуемую информацию и т. д. Созданные человеком машины могут управлять производственными и другими процессами по определенным, заранее составленным программам и в некоторых случаях автоматически обеспечивать процессы с оптимальными результатами.
Наконец, машины могут в некоторых случаях заменять отдельные органы человека, такие, например, как конечности (механизмы манипуляторов, протезы), сердце (искусственное сердце) и т. д.
Таким образом, понятием машины охватывается большое число самых различных объектов, применяемых человеческом для своих трудовых и физиологических функций.
Понятие «машина» может быть в обобщенном виде выражено следующим образом: машина есть устройство, создаваемое человеком для изучения и использования законов природы с целью облегчения физического и умственного труда, увеличения его производительности и облегчения путем частичной или полной замены человека в его трудовых и физиологических функциях.
В более краткой форме понятие «машина» может быть также определено следующим образом: машина есть устройство, выполняющее механические движения для преобразования энергии, материалов и информации в целях замены или облегчения физического и умственного труда человека.
Содержание
|
Введение |
|
1 Техническое задание на курсовую работу |
|
1.1 Входные параметры и схемы проектируемых механизмов |
|
1.2 Описание работы машины |
|
2 Структурный анализ механизма |
|
2.1 Структурный анализ рычажного механизма |
|
3 Кинематический анализ рычажного механизма |
|
3.1 Определение положения звеньев и точек механизма |
|
3.2 Определение скоростей точек и звеньев механизма |
|
3.3 Определение ускорений точек и звеньев механизма |
|
4 Силовой анализ рычажного механизма |
|
4.1 Силовой анализ группы Ассура 4-5 |
|
4.2 Силовой анализ группы Ассура 2-3 |
|
4.3 Силовой анализ начального звена |
|
5. Синтез зубчатого механизма |
|
5.1 Синтез простой передачи |
|
5.2 Синтез планетарного редуктора |
|
5.3 Картины линейных и угловых скоростей зубчатого механизма 6 Синтез кулачкового механизма 6.1 Кинематические диаграммы выходного звена 6.2 Определение минимального радиуса кулачка 6.3 Профилирование кулачка Список использованных источников |
|
|

|
Размеры звеньев рычажного механизма
|
х, м |
0,06 |
|
у, м |
0,12 |
|
|
lO1A, м |
0,25 |
|
|
lO2В , м |
0,42 |
|
|
lВС =2lBS4, м |
1,00 |
|
|
Массы звеньев рычажного механизма |
m1, кг |
5 |
|
m3, кг |
5,2 |
|
|
m4, кг |
14 |
|
|
m5, кг |
30 |
|
|
Моменты инерции звеньев |
Js3, кг×м2 |
0,42 |
|
Js4, кг×м2 |
0,7 |
|
|
Сила резания |
FC, Н |
620 |
|
Число зубьев колес простой передачи |
z7 |
12 |
|
z8 |
36 |
|
|
Модуль простой передачи |
m1, мм |
5 |
|
Угловая скорость электродвигателя |
ωдв, рад/с |
145 |
|
Угловая скорость кривошипа |
ω1, рад/с |
4 |
|
Модуль планетарного редуктора |
m2, мм |
4 |
|
Число блочных сателлитов |
k |
3 |
|
Ход толкателя кулачкового механизма |
Smax, мм |
24 |
|
Фазовые углы поворота кулачка |
φу= φв, град |
105 |
|
φд , град |
10 |
|
|
Допустимый угол давления |
αдоп, град |
27 |
Таблица - входные параметры:
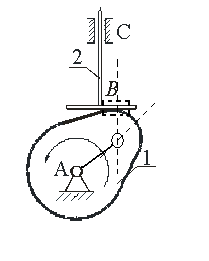
1.2 Описание работы машины
Прессовые формовочные машины. Такие машины уплотняют формовочные смеси путем прессования ее в опоку сверху или снизу. Машины с верхним прессованием уплотняют формовочную смесь вдавливанием ее в опоку сверху. Формовочный стол, на котором крепится модельная плита, представляет собой поршень прессового цилиндра. Над формовочным столом машины на неподвижной траверсе крепится прессовая колодка, Для изготовления полуформы опоку устанавливают на модельную плиту стола. Сверху на опоку устанавливают наполнительную рамку. Высота рамки должна быть такой, чтобы после прессования формовочная смесь имела необходимую плотность, а уровень ее совпадал с верхним краем опоки. Установленную опоку с рамкой заполняют формовочной смесью, траверсу машины устанавливают над опокой так, чтобы его прессовая колодка была над рамкой опоки с зазором 1 мм. Подачей воздуха в цилиндр машины стол с опокой поднимается кверху до упора рамки в траверсу. При этом прессовая колодка входит в рамку и выпрессовывает из нее смесь в опоку, уплотняя ее. Для изготовления полуформы модельную плиту, расположенную на столе, обдувают сжатым воздухом и опрыскивают разделительной жидкостью. На рамке стола устанавливают опоку и заполняют ее смесью. Выровняв смесь сверху по уровню краев опоки, стол с опокой, поворачивая на стойке, устанавливают на позицию прессования. Поворотом клапана управления подают под поршень прессового цилиндра сжатый воздух. При этом поршень, поднимаясь вверх, выпрессовывает смесь в опоку, уплотняя ее. Из прессового цилиндра выпускают воздух, поршень опускается, извлекая модель из формы. Стол выводится из-под траверсы; в исходное положение, готовую полуформу снимают со стола. Аналогично первой, на втором столе машины изготовляют вторую полуформу.
2 Структурный анализ механизма
2.1 Структурный анализ рычажного механизма
По составленной структурной схеме выполним структурный анализ

O1(1;6), Vкл, В
A1(1;2), Vкл, В
A2(2;3), Vкл, П
O2 (6;3),Vкл, В
B (3;4), Vкл, В
C(4;5), Vкл, В
C' (5;6),Vкл, П
Число W степеней свободы кинематической цепи относительно звена, принятого за неподвижное, называется чилсом степеней свободы кинематической цепи или, кратко, степеней свободы.
Если кинематическая цепь образована парами толькоV класса, то формула принимается следующий вид:
W=3n-2p5-p4,
гдеn- число неподвижных звеньев кинематической цепи.
У нас 5 подвижных звеньев и 7 кинематических пар V класса, подставим в уравнение и получим:
W=3∙5-2∙7=1.
Разбиваем на группы Ассура:
О1 S1
1







W=3∙1-2∙1=1
Механизм первого класса

3
O2 S3





6


A1,
A2


2
W=3∙2-2∙3=0
Группа АссураII класса,2-го порядка
B
4 S4



C,
C'


5 6





W=3∙2-2∙3=0
Группа Ассура II класса,2-го порядка
I(1;6)→ II (2;3)→ II(4;5)
Шестизвенный кривошипно-ползунный механизм II класса
2.2 Структурный анализ кулачкового механизма
По составленной структурной схеме выполним структурный анализ

A (1; 3), Vкл, В
B (1; 2), IVкл
C (2; 3), Vкл, П
У нас 2 подвижных звеньев,3 кинематических пар V класса и 1 кинематическая пара IV класса, получим:
W=3·2-2·3-1=1
Производим замену:




 После
замены кинематической пары IV
класса получим:
После
замены кинематической пары IV
класса получим:



 C 3
C 3
B'

4
1 D
A

![]()





Определим число и класс кинематической пары:
B' (4; 2), Vкл, П
D (1;4), Vкл, В
C







B'
 2
2


 4 D
4 D
W=3∙2-2∙3=0
Группа Асура II класса, 2-го порядка
A




1


Механизм первого класса
I(1;3)→ II (4;2)
Четырехзвенный кривошипно-ползунный механизм II класса
3 Кинематический анализ рычажного механизма
3.1 Определение положений звеньев и точек механизма
Зная длины отдельных звеньев механизма, на плане механизма показано положение механизма, для которого будем выполнять кинематический и силовой анализ.
Построение выполняем с учётом масштабного коэффициента длин:
µl=
LАB/(O1A)
= 0,25/12,5 = 0,02 [ ].
].
Строим план механизма, учитывая масштабный коэффициент:
(O1A) = LO1A/μl =0,25/0,02 = 12,5мм
(O2В) = LО2В/μl=0,42/0,02 = 21мм
(BC) = LBC / μl=1/0,02 = 50мм
(BS4) = LBS4/ μl= 0,5/0,02 = 25мм
(x) = lb/ μl= 0,06/0,02 = 3мм
(y) = lc/ μl= 0,12/0,02 = 6мм
Сначала построим точки О1 и О2. Они находятся друг относительно друга на ширине x = 3 мм и высоте у = 6 мм. Затем, относительно О1 и О2, найдём положение точки А и В. Циркулем от точки О1 чертим круг радиусом 12,5 мм. Это траектория движения точки А. И от точки О2 радиусом 21 мм, следовательно это траектория точки В. Далее, находим точку B, от выбранной точки А проводим отрезок до стойки О2, и далее по отрезку проводим до пересечения с окружностью О2В. Точка пересечения и будет точкой В. Для нахождения точки С, из найденной точки B проводим окружность радиусом BC = 50 мм и от стойки О2 отрезок параллельную Ох. Пересечение круга и отрезка определяет положение точки С.
3.2 Определение скоростей точек и звеньев механизма
Скорость точки A1:

Направим
 перпендикулярно O1A
в сторону
перпендикулярно O1A
в сторону
 .
.
На плане скоростей для заданного положения механизма изобразим скорость точки A отрезок pa=100мм, тогда масштабный коэффициент плана скоростей будет равен: