

23. Метод динамического программирования р.Беллмана
Любой конечный участок оптимальной траектории явл тоже оптимальной траекторией. Этот принцип опт-ти справедлив для сис-м у к-ых опт-ная траектория не зависит от предистории системы, а целиком определяется исходным её состоянием.
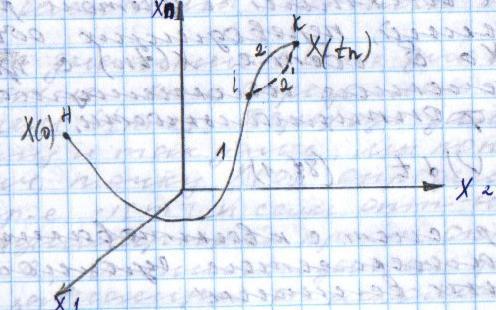
Предположим, что речь идёт о цифровой сис-ме с квантованием по уровню и по времени. Требуется найти закон управления U(t) с учётом ряда ограничений, переводящий объект из состояния х(0) в с. Х(tn) при условии обеспечения минимума критерия оптимальности в виде функционала. Для дискретной системы с квантованием по времени
Q=∫0tn G(X,U)dt можно записать в виде Q=Σ (n=0 m)G{X[n],U[n]} (1)
Введено относительное время n – текущий № шага во времени, к-ый = периоду квантования.
Задача заключается в опред-нии управления U[n] в виде последовательности значений U[0], U[1]… U[m-1], каждое из которых может имеет 1 из l дискретных значений. Это управление U[n] должно минимизировать сумму (1). Должны быть заданы ограничения на U и X, входе и выходе
Будем искать решение двигаясь с конечного момента времени t=tn, n=m Найдём и запомним оптимальное значение управляющего воздействия U[m-1] в начале последнего интервала для каждого возможного дискретного значения Х [m-1]. Одновременно запоминаем и соответствующее значение приращения ∆Qm-1 – критерий оптимальности. В рез-те нах опт-ное значение ∆Qm-1 и U[m-1] и запоминаем, как функции.
Переходим к началу [m-2] шага, нах ∆Qm-2 за 2 последних шага и соотв-щее опт-ное значение U[m-2], как ф-цию вых величины системы Х [m-2].
Для каждого значения U[m-2] сперва нах приращение критерия за 2-й шаг и значение Х [m-1] в конце 2го шага. После этого опред-ем полное приращение ∆Q[m-2] за 2 шага. Переходя далее к началу [m-3] шага и тд попадаем в начальную точку x[0].Опред-в при этом оптим-е управление U[n] и сам оптим-ый процесс x[n] и суммарную величину критерия оптимальности Q.
Оптимизация функционала зависящего от искомой ф-ции U[n] заменяется последовательностью n-оптимизаций, значительно более простой функции ∆Q[m-i] одной переменной U[m-i]
24. Синтез оптимальных сау.
Оптимальные
САУ могут быть 2ух типов: Разомкнутые и
замкнутые. В простейшем случае когда
внешнее воздействие известно можно
построить оптимальное САУ в виде
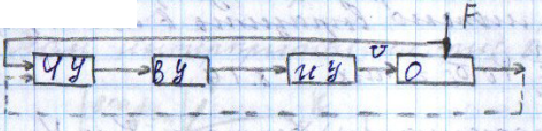
разомкнутой системы.![]()
ПУ – программное устройство.ИУ – исполнительное устройство.О – объект управления.
Пример: вывод (калич.) объекта на орбиту.
Синтез таких САУ сводится к синтезу оптимальной программы управления v(t), которое заранее вводится в ПУ. Если внешнее воздействие неизвестно, но их можно оперативно измерить, то оптимальный процесс может быть реализован в виде системы:
F попадает не только на О но и измеряется чувствительным устройством.
 Штрих
пунктиром показаны данные о состоянии
объекта до начала очередного процесса
управления (ввода начальных условий).
Штрих
пунктиром показаны данные о состоянии
объекта до начала очередного процесса
управления (ввода начальных условий).
Пример: САУ курса самолета или корабля, где в качестве ВУ используется бортовая ЦВМ.
Синтез оптимальной замкнутой САУ заключается в нахождении оператора управляющего воздействия в виде зависимости v(t), обеспечивающее оптимальный процесс х(t) на выходе при заданных внешних воздействиях и начальных условиях.

В
таких системах осуществляется оптимальное
управление вне зависимости от характера
изменения воздействия во времени. В
общем случае зависимость v(x),
является нелинейной.
 Ayy
– оператор (нелинейной) УУ.В
наиболее общих случаях, является
комбинир. Системами, в которых управление
осуществляется как функция от Х, так и
от внешних воздействий. V=V(X,F,G)
Ayy
– оператор (нелинейной) УУ.В
наиболее общих случаях, является
комбинир. Системами, в которых управление
осуществляется как функция от Х, так и
от внешних воздействий. V=V(X,F,G)
Такие системы состоят из разомкнутой системы оптимального программного управления и замкнутой САУ, устраняющей отклонения от прописанного программой оптимального режима работы объекта, вызвана различными причинами.
Критерии оптимальности для синтеза программы разомкнутого и замкнутого управления могут быть различными. Например в случае синтеза автопилота летающего аппарата, программа управления может быть оптимизирована по условию минимальности топлива, а замкнутой системы по критерию качества переходного процесса.