

27. Самоорганизующиеся Сау.
Адаптивные Сау – системы, которые автоматически приспосабливаться к изменения внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления путем изменения структуры и параметров УУ.
Это
адаптивный САУ, в которых адаптация
осуществляется путем изменения оператора,
т.е структурной схемы (УУОсновной). Эту
САУ можно представить такой же схемой
как и самонастраивающийся, однако здесь
воздействие y
на стороны УУадаптации на УУосновные
вызывает изменение не численного
значения параметров, а изменение
структурной схемы УУосновные, поэтому
их еще называют системы с переменной
структурой.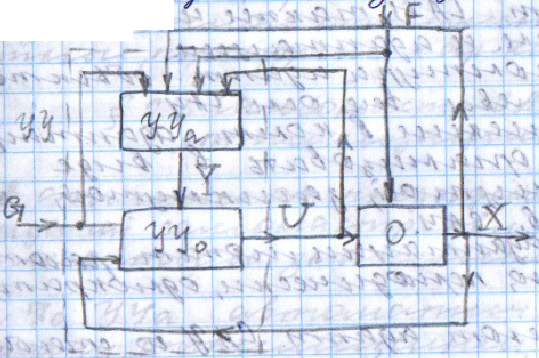
У них сигнал У является дискретным сигналом, каждому значению которого соответствует определенный оператор т.е определенный алгоритм управления объектом. Пример: система управления противовоздушной обороны, робот