

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Тюменский государственный нефтегазовый университет»
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра «Автоматизации и управления»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторной работе
«РАСЧЁТ НАСТРОЕК РЕГУЛЯТОРОВ ЭМПИРИЧЕСКИМ МЕТОДОМ ЗИГЛЕРА-НИКОЛЬСА»
по дисциплине «теория автоматического управления»
для студентов специальностей:
«Автоматизация технологических процессов», «Электропривод и автоматика промышленных установок и технологических комплексов».
Тюмень 2005
Утверждено редакционно-издательским советом Тюменского государственного нефтегазового университета
Составители: доцент, к.т.н. Макарова Л.Н.
к.т.н. Макаров А.В.
асс. Лапик Н.В.
© Государственное образовательное учреждение высшего профессионального образования
«Тюменский государственный нефтегазовый университет», Тюмень 2005г.
СОДЕРЖАНИЕ
СОДЕРЖАНИЕ 3
ВВЕДЕНИЕ 4
-
ЭМПИРИЧЕСКИЙ АЛГОРИТМ 5
-
АНАЛИТИЧЕСКИЙ ПУТЬ ОПРЕДЕЛЕНИЯ ККР 6
ПРИМЕРЫ 8
-
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ 18
-
ИСПОЛЬЗОВАНИЕ ПРОГРАММНОГО ПАКЕТА
MATLAB 20
-
СПИСОК ЛИТЕРАТУРЫ 22
3
ВВЕДЕНИЕ
В любой системе автоматического управления можно выделить две составляющие: объект управления и устройство управления. Устройство управления может иметь произвольный закон преобразования своего входного воздействия в выходной сигнал.
Иногда этот закон преобразования имеет вид линейной комбинации трёх основных типов преобразования входной величины: пропорционального (П), дифференциального (Д), интегрального (И).
Стандартные виды преобразования непрерывного вида (законы преобразования):
-
Пропорциональный
![]() ,
,
где
![]() -
выходная величина,
-
выходная величина,
![]() -входная
величина,
-входная
величина,
![]() -коэффициент
пропорциональности.
-коэффициент
пропорциональности.
-
Дифференциальный
![]() .
.
-
Интегральный
![]() .
.
-
Пропорционально-интегральный
![]() .
.
-
Пропорционально-дифференциальный
![]() .
.
-
Пропорционально-интегрально-дифференциальный
![]() .
.
4
1.Эмпирический алгоритм
1.1. К реальному объекту прикладывают пропорциональное управление с очень малым коэффициентом усиления.
1.2. Коэффициент усиления увеличивается до тех пор, пока в контуре объект-регулятор (рисунок 1) не начнутся колебания.
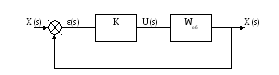
Рисунок 1. Контур объект-регулятор
1.3. Регистрируется критическое значение коэффициента усиления регулятора и период колебаний на его выходе.
1.4. Устанавливаются значения параметров регулятора согласно таблице 1.
Таблица 1. Настройки регулятора Зиглера-Никольса
|
Вид регулятора |
Кр |
Ти |
Тд |
|
П |
0,5 Ккр |
|
|
|
ПИ |
0,45 Ккр |
Ткр/1,2 |
|
|
ПИД |
0,6 Ккр |
0,5 Ткр |
0,125 Ткр |
1.5. Строятся
переходные характеристики и определяются
прямые показатели качества: перерегулирование
![]() ,
время регулирования
,
время регулирования
![]() .
.
1.6. Если прямые показатели качества оказались хуже заданных, то несколько изменяют (по очереди) настройки и вновь рассчитывают прямые показатели качества, добиваясь нужных, или меняют тип регулятора.
5
2.Аналитический путь определения Ккр
2.1. Расчет критических значений
Критические значения могут быть рассчитаны аналитическим путем на основе критерия устойчивости Найквиста.
Для П-регулятора передаточная функция разомкнутой системы имеет вид
![]() .
.
Система находится на границе устойчивости, если
![]() ,
,
тогда
![]() .
.
Из последнего
равенства определяется последовательно
![]() ;
;
![]() ;
Ткр.
;
Ткр.
Все вычисления выполняются по алгоритму.
2.2. Алгоритм:
-
Составить передаточную функцию разомкнутой системы
 .
. -
Подставить вместо
 ,
записать АФЧХ разомкнутой системы
,
записать АФЧХ разомкнутой системы

-
Выразить
![]() .
.
-
Записать Ккр в первой алгебраической форме
![]() .
.
-
Так как комплексные числа равны и имеют соответственно равные действительные и мнимые части, то приравнять
 =0
и найти
=0
и найти
 .
.
6
-
Подставить
 в
действительную часть и найти критическое
значение коэффициента усиления
в
действительную часть и найти критическое
значение коэффициента усиления
![]() .
.
-
Найти критический период
![]() .
.
-
По таблице 1 рассчитать настройки для заданного алгоритма управления.
-
Записать передаточную функцию разомкнутой системы (Wp(s)) с выбранным регулятором
![]() .
.
-
Записать передаточную функцию замкнутой системы (Wзам(s)), если обратная связь единичная:
![]() .
.
-
Записать изображение переходной характеристики (H(s))
![]() .
.
-
Найти оригинал переходной характеристики (h(t))
![]() .
.
-
Построить переходную характеристику (h(t)).
-
Определить прямые показатели качества (время регулирования (tр) при
 ;
перерегулирование
;
перерегулирование

 ,
,
где hуст – установившееся значение выходной величины при единичном воздействии;
hmax – максимальное значение выходной величины.
7
2.3. Примеры
Пример 1.
Для объекта с заданной передаточной функцией найти настройки ПИ и ПИД-регуляторов и проверить прямые показатели качества.
![]() .
.
Решение: АФЧХ объекта имеет вид:
![]() .
.
По граничному условию устойчивости
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Для ПИ-регулятора
с передаточной функцией
![]()
![]() ;
;
![]() ;
;
![]() ;
;
8
![]() ;
;
![]() ;
;
![]()
Для настроек,
вычисленных по таблице Зиглера-Никольса,
получили перерегулирование σ=0%, время
регулирования tp=53,6.
Рисунок 2. Переходная
характеристика
![]()
Амплитудно-частотная характеристика имеет вид
![]() (рисунок 3).
(рисунок 3).

Рисунок 3. АЧХ замкнутой системы (Wз(jω))
9
Для ПИД-регулятора
с передаточной функцией
![]()
где
![]() -
балластная постоянная времени, равная
(0,1 – 0,2)
-
балластная постоянная времени, равная
(0,1 – 0,2)
![]() ,
значения постоянных
равны:
,
значения постоянных
равны:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.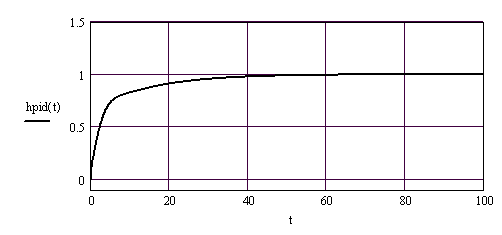
Рисунок 4. Переходная
характеристика
![]()
![]() ;
; ![]() .
.
10
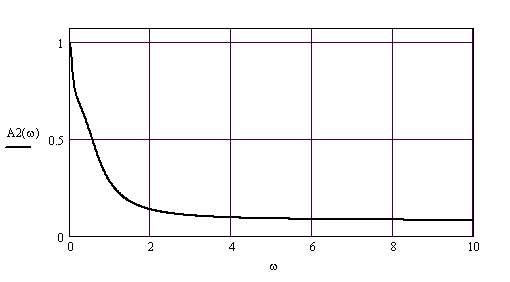
Рисунок 5. АЧХ замкнутой системы (Wз(jω))
![]() .
.
Пример 2.
Найти настройки ПИ и ПИД-регуляторов, оценить прямые показатели качества. Передаточная функция объекта имеет вид:
![]() .
.
Решение:
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]() ;
;
11
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Для ПИ-регулятора
с передаточной функцией
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Для настроек, вычисленных по таблице Зиглера-Никольса, получили перерегулирование σ=64%, tp=107 (кривая 1). Для улучшения показателей качества уменьшили коэффициента передачи регулятора, kp =0.15, тогда σ=12%, tp =43 (кривая 2 рисунка 6).
12
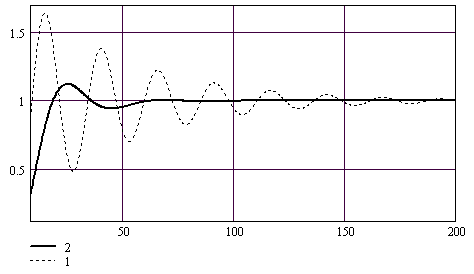
Рисунок 6. Переходная
характеристика
![]()
Для ПИД-регулятора
с передаточной функцией
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Показатели качества системы с настройками из таблицы Зиглера-Никольса σ=49%, tp=34; показатели качества системы с настройками,
где был уменьшен коэффициент усиления до значения kp=0,1, σ=14%, tp=47,8 (кривая 2 рисунка 7).
13
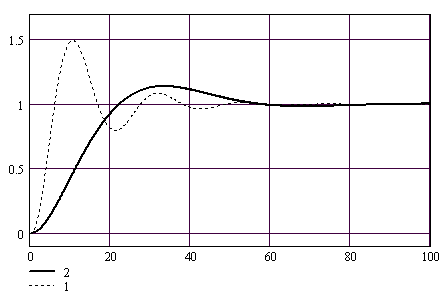
Рисунок 7. Переходная
характеристика
![]()
Пример 3.
Передаточная функция объекта
![]() .
.
Найти настройки ПИ и ПИД-регуляторов, сравнить полученные
показатели качества.
![]()
![]() ;
;
![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
;
![]() .
.
14
Для ПИ-регулятора
с передаточной функцией
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Для настроек, вычисленных по таблице Зиглера-Никольса, получили σ=70%, M=6,16 (кривая 1). Для улучшения показателей качества уменьшили коэффициента передачи регулятора и при постоянной интегрирования Ти=4 и kp=3,1 σ=26%, M =1,79 (кривая 2 рисунка 8, рисунка 9).
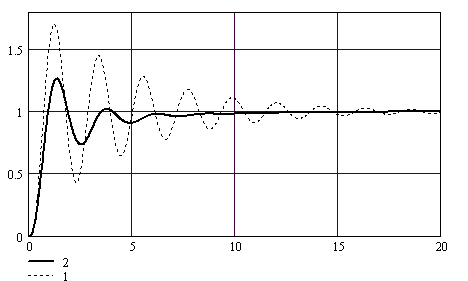
Рисунок 8. Переходная
характеристика
![]()
15
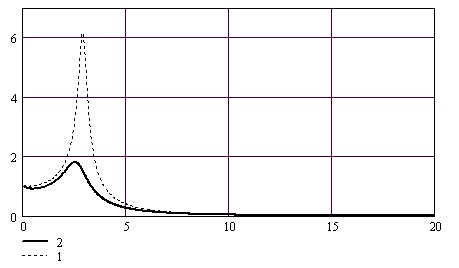
Рисунок 9. АЧХ замкнутой системы (Wз(jω)).
Для ПИД-регулятора
с передаточной функцией
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Показатели качества системы с настройками из таблицы Зиглера-Никольса: σ=52%, M=2,24; показатели качества системы с настройками,
16
где был уменьшен коэффициент усиления kp=2, σ=29%, M=1,47. (кривая 2 рисунка 10, рисунка 11).
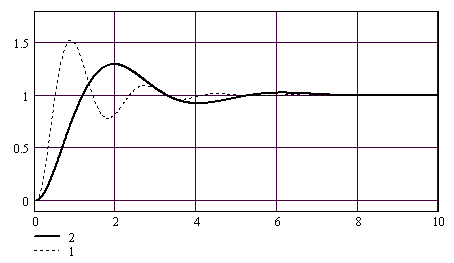
Рисунок 10. Переходная
характеристика
![]()
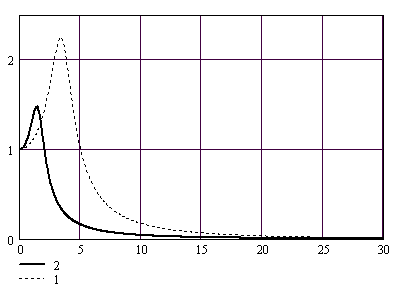
Рисунок 11. АЧХ замкнутой системы (Wз(jω))
По прямым и косвенным показателям качества система с ПИД-регулятором лучше системы с ПИ-регулятором.
17