

Введение
«Механика» - учебная дисциплина, лежащая в основе общетехнической подготовки бакалавров для отраслей энергетики. Механика является теоретической базой машиностроения. Механика играет роль в повышении надежности, качества проектирования и правильной эксплуатации машин механизмов приборов и энергетики и электромеханике.
Для освоения курса «Механика» большую роль играет самостоятельная работа студентов. Самостоятельная работа студентов прививает будущим специалистам навыки творческого решения практических задач и приучает студентов работе с технической и справочной литературой. Такие навыки студент получает в процессе самостоятельного решения задач, а также при выполнении домашних заданий, называемых в учебных программах расчетно-графическими работами (РГР). Каждая из РГР является комплексной задачей, охватывающей ряд связанных между собой расчетных вопросов. Это помогает студентам обладать инженерными методами решения типовых задач предмета, приучает их к анализу методов и способствует приобретению навыков грамотного оформления технических расчетов с представлением схем, эпюр и чертежей.
При выполнении РГР у студентов часто возникает большое количество вопросов практического характера, на которые они зачастую не могут получить ответа из учебника, сборника задач или лекционного материала.
Поэтому целью настоящего учебного пособия является оказание помощи студентам при выполнении ими домашних заданий. И с другой стороны оно позволяет существенно сократить время, затрачиваемое на подготовку студентов, выдачу и объяснение заданий, а также на консультации.
В пособии подробно изложены указания по каждой расчетно-графической работе с примерами расчетов, что облегчить их выполнение. Все физические величины в единицах приведены международной системе СИ.
Студентам следует помнить, что данное учебное пособие может быть полезным лишь в том случае, если они предварительно изучат теоретическую часть курса, относящуюся к той или иной расчетно-графической работе.
1. Определение реакций опор твердого тела
1.1 Статика твердого тела. Сила
Сила – мера механического взаимодействия двух тел (рисунок 1.1).

Рисунок 1.1
1.2 Сложение сил
Вектор равнодействующей двух сил, приложенных к абсолютно твердому телу в одной точке, равен сумме векторов данных сил (рисунок 1.2).
![]()
где
![]() - равнодействующая сил
- равнодействующая сил![]() и
и![]() .
.


Правила параллелограмма Правила треугольника
Рисунок 1.2
1.3 Проекция силы на ось
Проекция силы на ось равна произведению модуля силы на косинус угла между этим векторам и положительным направлением оси проекций (рисунок 1.3).
Fx = F cos – проекция силы на ось х.

Рисунок 1.3
1.4 Компонента (составляющая) силы по оси
Всякий вектор можно представить в виде произведения его модуля на его единичный вектор (рисунок 1.4).
![]() ;
;
![]() -
компонента силы
-
компонента силы
![]() по осих;
по осих;
![]() –единичный
вектор (орт) оси х.
–единичный
вектор (орт) оси х.

Рисунок 1.4
1.5 Проекция силы на плоскость
Проекция силы на плоскость равна произведению модуля силы на косинус угла между этим вектором и плоскостью (рисунок 1.5).
![]() -
проекция силы
-
проекция силы
![]() на плоскоть 0ХУ
на плоскоть 0ХУ
![]() -
модуль силы
-
модуль силы
![]() .
.

Рисунок 1.5
1.6 Разложение силы по двум заданным направлениям
Для разложения силы по двум заданным направлениям достаточно из конца вектора F провести прямые, до их пересечения с этими параллельные данными прямым 1 и 2 (рисунок 1.6).
|
|
F
2
-
составляет силы
|

Рисунок 1.6
1.7 Разложение силы по трем заданным направлениям (рисунок 1.7)
|
|
|

Рисунок 1.7
1.8 Аналитические задание силы
Аналитическая
сила
![]() задается ее проекциями на оси декартовой
системы координат, (рисунок 8) т.е. задаютсяFx,
Fy,
Fz,
тогда:
задается ее проекциями на оси декартовой
системы координат, (рисунок 8) т.е. задаютсяFx,
Fy,
Fz,
тогда:


Рисунок 1.8
1.2 Момент силы и пары сил
1.2.1 Алгебраический момент силы относительно центра
Абсолютная величина момента силы относительно данной точки О равна произведении модуля силы на ее плечо относительно этой точки (рисунок 1.9).
|
Рисунок 1.9 |
где
|

1.2.2 Пара сил и момент пар
Парой сил называется система двух равных по модулю антипараллеьных сил, численное значение момента пары равно произведению модуля одной из сил пары на плечо этой пары (рисунок 1.10).
|
Рисунок 1.10
|
d – плечо пары сил;
|

Пара сил не имеет равнодействующей. Сложение моментов пар, лежащих в одной плоскости равно:
![]()
1.3 Система сил
1.3.1 Система сходящихся сил приводится к одной силе - равнодействующей:
![]()
![]()
![]()
![]()
Уравнения равновесия
![]()
1.3.2 Параллельные силы
Силы, направленные в одну сторону (рисунок 1.11).
|
Рисунок 1.11
|
|


Силы, направленные в разные стороны (рисунок 1.12).
|
Рисунок 1.12
|
|


1.3.3 Параллельные силы, распределенные по линии
Равнодействующая сила параллельных сил интенсивного равна q = q (х) и точка приложения(рисунок 1.13):


Рисунок 1.13
Параллельные силы распределены по прямоугольнику (рисунок 1.14).
![]()

Рисунок 1.14
Параллельные силы распределено треугольнику (рисунок 1.15).
![]()

Рисунок 1.15
1.4 Плоская система сил
1.4.1 Главный вектор и главный момент (рисунок 1.16).

Рисунок 1.16
![]() главный
вектор системы сил;
главный
вектор системы сил;

![]() главный
момент системы сил;
главный
момент системы сил;
Алгебраическая сумма моментов всех сил, действующих на тело, относительно центра приведения, называются главным моментов системы относительно этого центра:
1.4.2 Уравнения равновесия в трех формах
а)
![]()
б)
![]()
Эти уравнения справедливы, если точки А, В и С не лежат на одной прямой.
с)
![]()
Эти уравнения справедливы, если ось 0х не перпендикулярна АВ.
1.4.3 Зависимость между главными моментами, вычисленными относительно двух центров приведения
![]()
Теорема о моменте равнодействующей (теорема Вариньона).
![]()
1.5 Задание к РГР – М 1
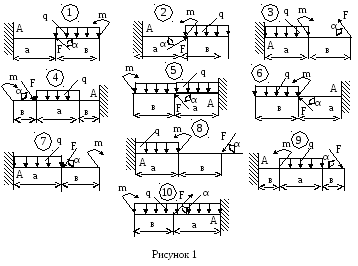
2.1 Задача 1. Для заданной схемы 1-10 (рисунок 1) определить реакции жесткой заделки А, если на неё действует сосредоточенная сила F, пара сил с моментом m и равномерно распределённая нагрузка интенсивностью q. Числовые данные для расчёта приведены в таблице 1.
Таблица 1- Исходные данные.
|
Варианты |
а, м |
в, м |
F, кН |
m, кНм |
q, кН/м |
α, град. |
|
1 |
4,0 |
2,2 |
4 |
26 |
2 |
30 |
|
2 |
3,8 |
2,4 |
6 |
24 |
2,5 |
45 |
|
3 |
3,6 |
2,6 |
8 |
22 |
3 |
60 |
|
4 |
3,4 |
2,8 |
10 |
20 |
3,5 |
30 |
|
5 |
3,2 |
3,0 |
12 |
18 |
4 |
45 |
|
6 |
3,0 |
3,2 |
14 |
16 |
4,5 |
60 |
|
7 |
2,8 |
3,4 |
6 |
14 |
5 |
30 |
|
8 |
2,6 |
3,6 |
8 |
12 |
2,5 |
45 |
|
9 |
2,4 |
3,8 |
10 |
10 |
3 |
60 |
|
10 |
2,2 |
4,0 |
12 |
8 |
1,5 |
30 |
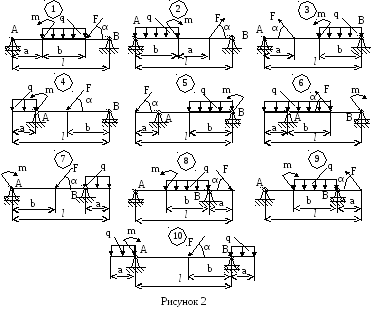
2.2 Задача 2. Для заданной схемы 1-10 (рисунок 2) определить реакции опор А и В горизонтальной балки, если на неё действует сосредоточенная сила F, пара сил с моментом m и равномерно распределённая нагрузка интенсивностью q. Числовые данные для расчёта приведены в таблице 2.
Таблица 2 - Исходные данные.
|
Величина |
Варианты | |||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 | |
|
F, кН |
20 |
22 |
24 |
26 |
28 |
30 |
32 |
34 |
36 |
38 |
|
q, кН/м |
2 |
2,5 |
3 |
3,5 |
4 |
1,5 |
2.5 |
3 |
3,5 |
4 |
|
m, кНм |
25 |
20 |
15 |
10 |
30 |
25 |
20 |
15 |
10 |
35 |
|
l, м |
10 |
12 |
14 |
16 |
8 |
10 |
12 |
14 |
16 |
8 |
|
a, м |
2 |
3 |
4 |
2 |
3 |
4 |
1 |
2 |
3 |
2 |
|
b, м |
1 |
2 |
3 |
2 |
1 |
2 |
1 |
3 |
3 |
2 |
|
α, град. |
30 |
45 |
60 |
30 |
45 |
60 |
30 |
45 |
60 |
30 |
2.3 Пример выполнения РГР №1.
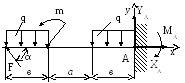
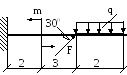
Задача 1.Исходные данные:
F = 6 кН; q = 4 кН/м; m = 16 кН·м; а = 6 м; в = 2 м; α = 300
Рисунок 3
Решение.
Рассмотрим равновесие балки. Проведем координатные оси x и y, и изобразим действующие на балку силы и реакции опоры А (рисунок 3).
Для определения ХА составим уравнение суммы проекций на ось x:
Σ Fiх = 0 ХА – F· соs α = 0,
откуда:
ХА = F · соs α = 6 · соs 300 = 5,2 кН.
Для определения YA составим уравнение суммы проекций на ось y:
Σ Fiy= 0 YА +F · sin α – 2·q·в = 0,
откуда:
YА = -F· соs α +2·q ·в = -6 · sin300 + 2·4·2 = 13 кН.
Для определения момента MA составим уравнение суммы моментов относительно опоры А:
Σ МА (Fi) = 0 -МA + m – F · sin α(a +2b)+ q ·в (a + b + b/2)+ q ·в · b/2 = 0,
откуда:
МA = m – F · sin α(a +2b)+ q ·в (a + b + b/2)+ q ·в · b/2 =
16 – 6 · sin 300(6 +2·2) + 4·2·(6 +2+2/2)+ 4·2·2/2 = 66 кHм.
Если значения реакций опоры А получаются с отрицательным знаком, это означает, что их предварительное направление на схеме было указано неверно.
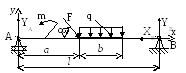
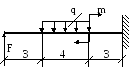
Задача 2.Исходные данные:
F= 10 кH; q = 8 кН/м; m = 5 кН·м; α = 600; l = 10 м; а = 4 м; b = 4 м.
Рисунок 4
Решение:
Рассмотрим равновесие балки. Проведем координатные оси х и у, и изобразим действующие на балку силы и реакции опор (рисунок 4).
Для определения YA составим уравнение суммы моментов относительно опоры В:
Σ МВ (Fi) = 0 -YA ·l + m + F· sin α ·( l – a) + q · b· ( l – a – b/2) = 0
Откуда
YA =( m + F· sin α ·( l – a) + q · b· ( l – a – b/2)) / l =
(5000 + 10000 · sin 600 · (10 – 4) +8000 · 4 · (10 - 4 - 4/2)) / 10 =18484 H.
Для определения YВ составим уравнение суммы моментов относительно опоры А:
Σ МА (Fi) = 0 YВ · l + m - F· sin α ·a - q · b · ( a + b/2) = 0
Откуда
YВ =(- m + F· sin α · a) + q · b· ( a + b/2)) / l =
(-5000 + 10000 · sin 600 · 4 + 8000 · 4 · (4 + 4/2)) / 10 = 22164 H.
Для определения ХВ составим уравнение суммы проекций на ось х:
Σ Fiх = 0 - ХВ + F· соs α = 0
откуда
ХВ = F· соs α = 10000 · соs 600 = 5000 Н.
Проверка:
Σ Fi у= 0 YA + YВ - F· sin α - q·b = 0
18496 + 22164 – 8660 – 32000 = 0.
Если значения реакций опор получаются со знаком минус, это означает, что их предварительное направление было указано неверно.