

Л+ПЗ 1.5 СНС
.pdf2.6. Супутникова навігаційна система
Одним з перспективних напрямків розвитку систем навігації є розробка РНС, що використовують штучні супутники Землі (далі - ШСЗ) яку називають – супутникова навігаційна система (СНС). В таких системах ШСЗ застосовуються в якості рухомих РНТ, при цьому РНС можуть забезпечувати вирішення задач навігації ЛА з високою точністю в будь-якій точці земної кулі, в будь-який час доби та року. РНС з ШСЗ уявляють собою комплекс взаємодіючих радіоелектронних засобів, розташованих на супутнику, ЛА та землі.
Серед особливостей, що відрізняють РНС з ШСЗ від усіх інших систем далекої навігації, є те, що радіовипромінююча апаратура в таких системах розміщується на ШСЗ, які рухаються зі швидкостями, перевищуючими швидкості руху літаків. Застосування ШСЗ дозволило для далекої навігації використати діапазон НВЧ, який характеризується великою пропускною здатністю радіосигналів та високою точністю вимірювання, незалежно від місця та часу.
Розрізняють пасивні та активні РНС з ШСЗ. В пасивних РНС з ШСЗ на ЛА відсутні випромінюючі пристрої, причому вся обробка прийнятих сигналів ведеться на літаку. Пропускна здатність у пасивних РНС з ШСЗ не обмежена. В активних РНС з ШСЗ прийняті на ЛА сигнали проходять первинну обробку, а потім передаються через супутник на наземний обчислювальний центр для визначення координат літака. Результати визначення координат знову ретранслюються на літак по відповідному каналу зв’язку. Така структура системи спрощує побудову бортової апаратури літака, але ускладнює роботу та склад наземного обладнання комплексу, а також обмежує пропускну здатність системи.
Застосування РНС з ШСЗ вимагає знання параметрів руху супутників.
Якщо вважати, що Земля уявляє собою однорідну кулю, що знаходиться в абсолютній пустоті, то у відповідності з законами небесної механіки рух супутника повинен проходити в одній площині по орбіті у вигляді еліпсу, фокус якого збігається з центром земної кулі (рис. 2.59). Площина орбіти повільно обертається в інерціальному просторі. Лінія вузлів утворюється при перехрещенні площини орбіти супутника з площиною екватора

Землі. Висхідний вузол уявляє собою точку, в якій ШСЗ перетинає |
|||
площину екватора з південної півкулі у північну. |
|||
Полярна вісь |
Земна куля |
|
|
z |
|
||
Орбіта супутника |
|||
ШСЗ |
|||
|
|
||
Перигей |
|
|
|
r |
|
|
|
hп |
|
Площина |
|
|
|
||
О |
Лінія |
екватора |
|
|
|
||
R |
hа |
Центр |
|
Висхідний |
|
||
|
еліпсу |
||
вузол |
|
||
|
|
||
|
в |
|
|
|
а |
|
|
|
|
Апогей |
|
|
|
Лінія апсид |
|
Рис. 2.59. Траєкторія руху ШСЗ на орбіті |
|||
Форма та розміри стаціонарної еліптичної орбіти визначаються двома параметрами, в якості яких звичайно використовуються велика піввісь а та ексцентриситет
е 1а 
 а2 в 2 ,
а2 в 2 ,
де в – мала піввісь. Мінімальна висота орбіти ШСЗ (у точці перигею) і максимальна (у точці апогею) відповідно дорівнюють hn, ha.
Вісь еліпсу, що з’єднує апогей та перигей, називається лінією апсид. При радіусі земної кулі R 6371 км параметри еліпсу визначаються співвідношеннями:
а R |
1 |
h h |
; |
е |
ha hп |
. |
|
|
|||||
|
2 |
a п |
|
2а |
||
|
|
|
|
|||
Усі параметри орбіти супутника можуть бути постійними лише в ідеалізованих умовах. В дійсності є низка збурюючих факторів, що обумовлені неоднорідністю гравітаційного поля Землі, впливом гравітаційних полів Місяця та Сонця, непостійністю опору
атмосфери, електричними та магнітними силами, які призводять до зміни параметрів руху супутника.
В теперішній час для РНС з ШСЗ використовуються три різновиди орбіт ШСЗ. Низькі орбіти мають висоту h = 900…3000 км з періодом обертання Т = 1,5…2,5 год. Для середніх орбіт ШСЗ h = 13000…20000 км і Т = 8…12 год. Найбільш високі орбіти, що мають h = 36000 км, у синхронних супутників, які рухаються в площині, близької до екваторіальної, з періодом обертання Т = 24 год.
2.6.1. Далекомірні та різницево-далекомірні СНС
Навігаційні ШСЗ є опорними навігаційними точками, що пересуваються у просторі за відомим законом. Використання ШСЗ в якості РНТ дозволяє створювати системи, які базуються на відомих в радіонавігації методах, перш за все далекомірному та різницево-далекомірному.
Носіями навігаційної інформації є радіосигнали, що випромінюються з ШСЗ. В параметрах радіосигналів містяться необхідні дані для визначення координат ЛА та параметрів його руху. По прийнятих на борту ЛА сигналах та інформації про параметри руху ШСЗ проводиться обчислення координат ЛА.
Узагальнена структурна схема СНС зображена на рис. 2.60, до
їїскладу входять:
-один або декілька супутників з приймально-передавальною апаратурою;
-мережа наземних станцій слідкування, розташованих в пунктах з відомими координатами та призначених для слідкування за супутниками з метою обчислення параметрів їх орбіт;
-обчислювальний центр, що робить розрахунок поточних параметрів орбіт супутників за даними наземних станцій слідкування та прогнозування вказаних параметрів на майбутнє;
-передавальна станція для передачі даних від обчислювального центру на літак через ШСЗ;
-бортові приймачі, що здійснюють прийом радіосигналів передавача супутника та їх декодування;
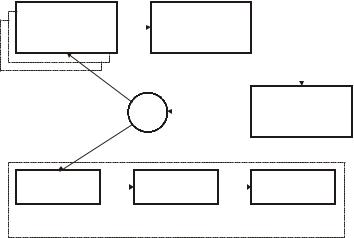
-обчислювальні та індикаторні бортові пристрої, що роблять по прийнятих радіосигналах визначення і відображення місцеположення ЛА.
Дані про положення супутника
Наземні |
|
|
|
|
Обчислю- |
|
|
|
станції |
|
|
|
|
вальний |
|
|
|
|
|
|
|
|
||||
стеження |
|
|
|
|
центр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ШСЗ |
|
|
Передавальна |
|||
|
|
|
станція |
|||||
|
|
|
||||||
|
|
|
|
|
|
|
||
Приймач |
|
|
Обчислювач |
|
Індикатор |
|||
|
|
|
||||||
|
Бортове обладнання |
|
|
|||||
Рис. 2.60. Узагальнена структурна схема супутникової навігаційної системи
В СНС можуть застосовуватись далекомірний та різницеводалекомірний методи визначення місцеположення ЛА.
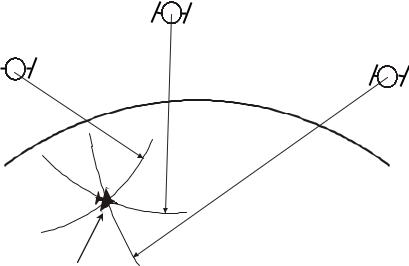
При далекомірному методі на борту ЛА проводиться вимірювання дальностей до навігаційних ШСЗ в один і той же момент часу. Кожній дальності відповідає сферична поверхня положення з центром в точці, де знаходиться ШСЗ у момент виконання вимірювання. Просторове положення ЛА визначається в результаті перетину трьох сферичних поверхонь положення (рис.
2.61).
При далекомірному методі для визначення координат ЛА може використовуватись як пасивний, так і активний режим роботи бортового обладнання літака. Для пасивних далекомірних систем координати ЛА визначаються з похибками із-за випадкових та систематичних помилок. Систематичні помилки при цьому обумовлені неузгодженням шкал часу на ШСЗ та ЛА за рахунок нестабільності еталонних генераторів. В РНС з ШСЗ, що працюють
за запитно-відповідним принципом, координати ЛА визначаються без систематичних помилок.
|
ШСЗ №2 |
ШСЗ №1 |
ШСЗ №3 |
|
|
|
R2 |
|
R 1 |
|
R 3 |
Місцеположення ЛА Рис. 2.61. Далекомірний метод визначення місцеположення ЛА
При різницево-далекомірному методі часові інтервали вимірюються не відносно місцевого опорного сигналу часу, а між сигналами, прийнятими від декількох ШСЗ. Для визначення координат ЛА у просторі проводиться вимірювання трьох незалежних різниць дальностей до чотирьох ШСЗ. При вимірюванні висоти польоту ЛА іншими засобами достатньо визначення тільки двох різниць дальностей до трьох ШСЗ.
2.6.2. Апаратура супутникової навігації
Призначенням супутникових навігаційних систем СНС є визначення місцезнаходження та векторів швидкості стаціонарних і рухомих об’єктів. До позитивних якостей СНС відносяться: всепогодність, глобальність, можливість керування повітряним рухом над океанами, висока точність і надійність, доступність.
На даний час в світовій практиці функціонують основні гло-
бальні СНС: американська NAVSTAR (Navigation system with timing and ranging) і російська ГЛОНАСС (Глобальна навігаційна
супутникова система). Незабаром буде розгорнута новітня загальноєвропейська СНС GALILEO. Найчастіше такі системи називають GPS (Global Positioning Systems).
Системи GPS і ГЛОНАСС
Глобальна навігаційна система GPS призначена для передачі навігаційних сигналів, які можуть одночасно прийматися в усіх регіонах світу. Система була розроблена за замовленням Міністерства оборони США, а космічні апарати КА виготовила компанія Rockwell International.
Перше штатне орбітальне угруповання системи розгорталося з червня 1989 р. по березень 1994 р.: на орбіту були виведені 24 КА Block II. Остаточне введення GPS в експлуатацію відбулося в 1995 р. Експлуатація й обслуговування здійснюються Міністерством оборони США. Система використовується в усьому світі для вирішення як військових, так і цивільних навігаційних завдань. GPS-приймач дозволяє визначати координати об’єкта (широту та довготу), швидкість його руху і точний час.
Російська СНС ГЛОНАСС розроблялася за замовленням Міністерства оборони Росії, але зараз застосовується для надання навігаційних послуг різним категоріям споживачів – без будь-яких обмежень. Орбітальне угруповання російської системи навігації було розгорнуто на початку 90-х років, а її комерційна експлуатація здійснюється з 1995 року.
Архітектура й основні характеристики
Системи GPS і ГЛОНАСС мають подібну архітектуру. До їх складу входять космічний сегмент, що складається з 24 КА, мережа наземних станцій спостереження за їхньою роботою та користувальницький сегмент (навігаційні приймачі). Всі супутники GPS/ГЛОНАСС є автономними. У складі підсистеми космічних апаратів можуть бути і додаткові КА, резервні, наприклад, у системі GPS їх кількість не менше трьох. Параметри орбіт КА періодично контролюються мережею наземних станцій спостереження, за допомогою яких (не рідше 1...2 рази на добу) обчислюються балістичні характеристики, реєструються відхилення КА від розрахункових траєкторій руху та визначається власний бортовий час. Наземні станції також контролюють справність навігаційних апаратур, установлених на борту КА. Для виявлення відмов апаратури потрібно, як мінімум, кілька годин.
Основні характеристики супутникових навігаційних систем GPS і ГЛОНАСС наведені в табл. 2.19.
|
|
Таблиця 2.19 |
Показник |
GPS |
ГЛОНАСС |
Орбітальне угруповання |
|
|
Кількість КА |
24 |
24 |
Кількість орбітальних площин |
6 |
3 |
Кількість КА в кожній площині |
4 |
8 |
Висота орбіти, км |
20 000 |
19 100 |
Нахилення орбіти, ° |
55 |
64,8 |
Період обігу КА, год |
12 |
11,26 |
Супутники |
|
|
Маса КА, кг |
1055 |
Н/д |
Потужність сонячних батарей, Вт |
450 |
Н/д |
Термін експлуатації, років |
7,5 |
2 ... 3 |
Навігаційні ретранслятори |
|
|
|
|
|
Робочі частоти, МГц |
L1=1575,42; |
1602,6... |
|
L2=12275,6 |
1615,5 |
ЕІВП, дБ/Вт |
Н/д |
24...27 |
Потужність передавача, Вт |
50 (L1); |
Н/д |
|
8 (L2) |
|
Поляризація |
Правобічна |
Правобічна |
Точність навігаційних визначень |
|
|
Похибка визначення |
100 (C/A-код); |
100 (СКО) |
місцезнаходження, м |
16 (P-код) |
|
Похибка визначення швидкості руху, |
10 (C/A-код); 0,1 |
0,9 |
м/c |
(P код) |
|
Похибка визначення часу |
340 нс (C/A-код); |
1 мс |
|
90 нc (P-код) |
|
Надійність навігаційних визначень, % |
95 |
Н/д |
Примітки: Н/д - немає даних; |
|
|
ЕІВП – еквівалентна ізотропно-випромінювана потужність |
|
|
В цивільній авіації навігаційні приймачі СНС використовують для організації повітряного руху, забезпечення польотів за маршрутом і на етапах заходу на посадку.
До основних характеристик супутникових навігаційних систем, крім точності і надійності визначення координат, ставляться такі вимоги як доступність і цілісність.
Термін «доступність» у системах навігації означає можливість доведення до користувачів навігаційних повідомлень. На практиці доступність (готовність) оцінюється як ступінь імовірності працездатності СНС перед її застосуванням і в процесі застосування.
Цілісність – це ступінь імовірності виявлення відмови протягом заданого часу. Для маршрутних польотів вимоги до цілісності становлять 0,99, або в термінах надійності, наприклад на етапі заходу на посадку, цілісність для інтервалів часу Т<6 с становить
1·10–7... 3,3·10–7.
Структура навігаційних сигналів GPS
Кожен GPS-супутник випромінює на двох частотах (L1 і L2) спеціальний навігаційний сигнал у вигляді фазоманіпульованої псевдовипадкової послідовності. У сигналі зашифровуються два види коду. Один з них – код С/А (coarse/acquisition або clear/acquisition) – доступний широкому колу цивільних споживачів. Він дозволяє одержувати лише приблизну оцінку місцезнаходження, тому називається «грубим» кодом. Передача коду С/А здійснюється на частоті L1 з використанням фазової маніпуляції псевдовипадкової послідовності довжиною 1023 символу. Захист від помилок забезпечується за допомогою коду Гоулда. Період повторення С/А-коду – 1 мс. Тактова частота –
1,023 МГц.
Інший код – P (precision code) забезпечує більш точне обчислення координат, але користуватися ним можуть не всі; доступ до нього обмежується провайдером послуг GPS. В основному P-код надається військовим і федеральним службам США. Цей код передається на частоті L2 із застосуванням наддовгої псевдовипадкової послідовності з періодом повторення 267 днів. Тактова частота – 10,23 МГц.
Крім цих кодів, у сигналі GPS може бути наявним так званий Y-код, що є шифрованою версією P-коду.
Крім кодів С/А і P, навігаційний супутник регулярно передає спеціальне повідомлення, що містить додаткові відомості. Користувач інформується про стан супутника і його параметрів: системний час, ефемериди (набори параметрів, що точно описують орбіту руху навігаційного супутника), прогноз іоносферної затримки, показники працездатності. Передача навігаційного повідомлення довжиною 1500 біт здійснюється зі швидкістю 50
біт/с на частотах L1 і/або L2.
Використання стандартних навігаційних приймачів GPS/ ГЛОНАСС
Координати рухомого абонента визначаються за допомогою стандартного навігаційного GPS- або GPS/ГЛОНАСС приймача. GPS/ГЛОНАСС – приймачі найчастіше застосовуються тоді, коли необхідно одержати високу точність координат (похибка не більше 100 м). Захопивши сигнал, навігаційний приймач автоматично обчислює координати об’єкта, швидкість сигналу та всесвітній час і формує звіт. Відомості про місцезнаходження об’єкта передаються за супутниковими каналами зв’язку в диспетчерський пункт.
Навігаційні пристрої можуть розрізнятися за кількістю каналів приймання, швидкістю відновлення даних, часом обчислень, точністю та надійністю визначення координат.
Сучасні GPS-пристрої звичайно оснащені від 6 до 24 приймачів, що дозволяє відстежувувати практично всі навігаційні супутники, що перебувають у зоні радіовидимості об’єкта. Якщо каналів менше, ніж «спостережуваних» супутників, то автоматично вибирається найбільш оптимальне сполучення КА. Швидкість відновлення навігаційних даних – 1 с. Час виявлення залежить від кількості одночасно спостережуваних супутників і режиму визначення місцезнаходження.
Визначення навігаційних параметрів може здійснюватися у двох режимах – 2D (двовимірному) і 3D (просторовому). У режимі 2D установлюються широта і довгота (висота вважається відомою); для цього досить наявності в зоні радіовидимості трьох супутників. Час визначення координат у режимі 2D звичайно не перевищує 2 хв. Для визначення просторових координат абонента (режим 3D) потрібно, щоб у відповідній зоні перебували не менше чотирьох КА. Гарантуються час виявлення не більше 3...4 хв і похибка обчислення координат не більше 100 м. Комбіновані GPS/ ГЛОНАСС – приймачі з узагальненим алгоритмом визначення місцезнаходження навіть при використанні стандартного З/А-коду забезпечують більш високу точність (15...20 м).
Навігаційний приймач сигналів для системи GPS складається з приймального модуля і малогабаритної антени з малошумним підсилювачем. Приймальний модуль випускається як у вигляді автономного пристрою з вбудованими джерелами живлення, так і у вигляді окремої плати, що вбудовується в абонентський термінал.
На ступінь точності обчислення координат впливає ряд факторів, які залежать від процедури їхнього визначення. Ці фактори прийнято називати факторами зниження точності. Як правило, при обчисленні координат застосовуються наступні стандартні фактори зниження точності:
-геометричний фактор зниження точності GDOP говорить про ступінь впливу похибок псевдодальності (остання характеризує міру далекості споживача від GPS-супутника). Залежить від положення супутника щодо GPS-приймача і від зсуву показання GPS-годинника. Розходження значень псевдодальності і фактичної далекості зв’язано зі зсувом показань часу GPS-супутника і споживача, а також із затримками поширення та інших помилок;
-горизонтальний фактор зниження точності HDOP показує ступінь впливу точності визначення горизонталі на похибки обчислення координат;
-фактор зниження точності визначення положення PDOP – це безрозмірний показник, який характеризує вплив на точність визначення координат похибки псевдодальності;
-відносний фактор зниження точності RDOP, по суті, дорівнює фактору зниження точності, нормалізованому на період, що становить 60 с;
-часовий фактор зниження точності TDOP описує ступінь впливу похибки показань часу на точність визначення координат;
-вертикальний фактор зниження точності VDOP показує ступінь впливу похибки у вертикальній площині на точність визначення координат.
Розглянемо основні джерела похибок, що впливають на точність навігаційних обчислень.
Похибки, обумовлені режимом селективного доступу (Selective availability, S/A). Реалізуючи цей режим, провайдер послуг GPS (Міністерство оборони США) навмисно знижує точність визначення місцезнаходження для цивільних споживачів. У режимі S/A формуються похибки штучного походження, внесені в сигнал на борту GPS-супутників з метою загрублення навігаційних вимірювань. Такими похибками є невірні дані про орбіту супутника та перекручування показань його часу за рахунок внесення додаткового псевдовипадкового сигналу. Величина середньоквадратичної похибки через вплив цього фактора становить приблизно 30 м.