

Л.1.2.АРК
.pdfЛ.1.2. Радіопеленгатори 2.1. Пеленг та курсовий кут радіостанції
До наземних орієнтирів необхідних при визначення місцеположення ЛА належать різноманітні радіонавігаційні наземні станції, що забезпечують визначення координат ПС радіотехнічними методами. Пункти розміщення таких станцій називають радіонавігаційними точками (РНТ). Розміщення радіостанції відносно ЛА визначається курсовим кутом та пеленгом.
Пеленг радіостанції – це кут в горизонтальній площині між північним напрямком меридіана, що проходить через центр мас ЛА, і напрямком на радіостанцію. Якщо пеленг відраховується від істинного (географічного) меридіана, він називається істинним пеленгом радіостанції (ІПР) (рис. 2.7), а якщо від магнітного – магнітним пеленгом радіостанції (МПР).
Пм Пі Пі 
ІПР |
ІПЛ |
|
ІК
 ККР
ККР
Рис. 2.7. Пеленг та курсовий кут радіостанції
Кут в горизонтальній площині між проекцією поздовжньої осі ЛА та напрямком на радіостанцію називається курсовим кутом радіостанції (ККР). Пеленг і курсовий кут пов’язані співвідношенням ІПР = ІК+ККР.
Істинний пеленг літака (ІПЛ) – це кут в горизонтальній площині, який відраховується за годинниковою стрілкою від північного напрямку географічного меридіана, що проходить через місцезнаходження радіостанції, до напрямку на ЛА: ІПЛ =
ІПР+180 + .
2.2. Класифікація радіотехнічних засобів навігації
Радіонавігаційний пристрій (РНП) – це радіотехнічний засіб,
що базується на певному фізичному принципі дії і призначений для визначення однієї чи кількох навігаційних величин. Радіонавігаційна система (РНС) – це сукупність кількох РНП, побудованих на спільному фізичному принципі дії, розташованих на борту ЛА та в певних точках на Землі, що взаємодіють між собою і служать для визначення однієї чи кількох навігаційних величин. Комплексна навігаційна система (КНС) – це сукупність навігаційних пристроїв, що базуються на різних фізичних принципах дії і використовуються для вирішення різних навігаційних задач.
Навігаційні радіоелектронні системи та пристрої поділяються на наступні типи:
1.За характером вимірювального навігаційного параметру: - кутомірні навігаційні системи (КНС); - далекомірні навігаційні системи (ДНС);
- різницево-далекомірні або гіперболічні системи (РДНС); - сумарно-дальномірні або еліптичні системи (СДНС); - вимірювачі повздовжньої або кутової швидкості;
- комбіновані системи (наприклад кутомірно-дальномірні).
2.В залежності від вимірюваного параметра електромагнітних коливань:
- амплітудні РНС базуються на створенні і використанні залежності амплітуди радіосигналу від просторових координат.
- фазові РНС базуються на створенні і використанні залежності фази електричного поля від просторових координат.
- частотні РНС базуються на створенні і використанні залежності частоти радіосигналу від просторових координат та швидкості ЛА.
- часові (імпульсні) РНС базуються на залежності часу розповсюдження радіохвиль від просторових координат.
3.В залежності від навігаційного застосування:
-радіотехнічні системи далекої навігації (РСДН), дальність застосування більше 500 км;
-радіотехнічні системи близької навігації (РСБН) дальність застосування до 500 км;
-радіотехнічні системи диспечерського керування польотом в районі аеродрому;
-радіотехнічні системи посадки;
-допоміжні РНП і РНС.
4. За характером випромінювання:
-неперервні;
-імпульсні.
6.За ступенем автономності: - автономні; - неавтономні.
7.За ступенем автоматизації: - автоматичні; - напівавтоматичні;
- неавтоматичні.
8.За способом індикації величин, що вимірюються: - звукове повідомлення; - візуальна індикація.
Основні технічні характеристики РНС
При проектуванні та розробці РНС керуються технічними вимогами, які визначаються призначенням систем. Розглянемо критерії технічних показників, що характеризують РНС:
Ефективність – ступінь відповідності РНС своєму призначенню. Надійність – здатність забезпечити безвідмовну роботу і задані
параметри в будь-яких умовах експлуатації.
Точність – здатність пристрою чи системи забезпечити вирішування задач навігації з заданою імовірністю та похибками, які не перевищують допустимих значень.
Робоча зона – область простору, в межах якої зберігається задана точність системи.
Пропускна здатність – здатність системи одночасно обслуговувати певну кількість ЛА.
Завадозахищеність – властивість РНП чи РНС нормально функціонувати в умовах дії природних чи штучних завад.
Мобільність – здатність швидко змінювати географічний район дії РНП і РНС.
Гнучкість – можливість використання РНП і РНС при швидкоплинній зміні зовнішніх умов.
Оперативність визначається часом, що витрачається на отримання первинних результатів радіонавігаційних параметрів, легкістю їх обробки та можливістю подальшого використання.
2.3. Кутомірні радіонавігаційні системи
Кутомірними РНС називаються системи, які забезпечують отримання на борту ЛА або на землі навігаційної інформації про взаємне кутове положення ЛА та джерела радіохвиль. Кутомірна РНС складається з двох частин, розташованих в різних точках простору: джерела радіохвиль та радіоприймального пристрою. В залежності від типу джерела радіохвиль та радіоприймального пристрою кутомірні РНС діляться на радіокомпасні (РКС), радіопеленгаторні (РПС) та радіомаячні (РМС) системи.
Радіокомпасна кутомірна система складається з бортових радіопеленгаторів і наземних або бортових радіопередавальних пристроїв. Радіопеленгатором називається приймальний пристрій, який дозволяє визначити напрямок на джерело випромінювання радіохвиль - радіомаяк. В якості пеленгаторів на ЛА використовуються автоматичні радіокомпаси (АРК), а в якості передавальних пристроїв – привідні аеродромні радіостанції
(ПАР), радіомовні станції, літакові зв’язкові чи аварійні радіостанції.
АРК вимірює курсовий кут (ККР) наземного радіопередавача. Знаючи ККР та курс літака, можна обчислити пеленг радіостанції.
АРК спільно з ПАР або радіомовними радіостанціями утворює РКС, що працює у діапазоні СХ. Вона дозволяє вирішувати такі задачі:
-визначення лінії положення літака;
-контроль шляху по дальності та напрямку;
-вивід літака у задану точку;
-політ на радіонавігаційну точку;
-визначення навігаційних елементів польоту;
-передпосадковий маневр та виконання заходу на посадку. АРК, що працює в діапазоні УКХ, спільно з літаковими
командними радіостанціями утворює РКС для здійснення міжлітакової навігації, а з аварійними УКХ радіостанціями – для виводу пошукового літака до району аварії.
Радіокомпасна кутомірна система має точність визначення пеленгу 2…3 і необмежену пропускну здатність. Недоліком системи є невисока завадозахищеність.
Радіопеленгаторна кутомірна система складається з наземного радіопеленгатора та літакової передавальної радіостанції. Наземний радіопеленгатор уявляє собою радіоприймальний пристрій з антеною напрямленої дії. За допомогою радіопеленгаторів визначається пеленг літака.
РПС використовується для рішення таких задач:
-визначення лінії положення літака;
-виведення літака у заданий район;
-здійснення заходу на посадку;
-політ на наземний радіопеленгатор.
Точність визначення пеленгу 1…2 . Дальність дії системи залежить від діапазона хвиль, висоти польоту літака і може досягати 2000 км для КХ пеленгаторів і 300 км для УКХ пеленгаторів. Недоліком системи також є невисока її завадозахищеність.
Радіомаячна кутомірна система складається з наземного радіомаяка (НРМ) та літакового радіоприймального пристрою. Радіомаяком називається передавальний пристрій з відомими географічними координатами, характеристика випроміненого сигналу якого залежить від напрямку випромінювання. В якості НРМ використовуються віяльні радіомаяки, а в якості приймальних пристроїв – АРК та літакові зв’язкові радіостанції. Віяльні радіомаяки працюють на фіксованих частотах СХ діапазону.
Для визначення лінії положення літака використовується спеціальна карта. Точність визначення лінії положення становить 0,25…0,5 у денний час і 1…2 вночі.
2.3.1. Принцип дії радіопеленгаторів
В якості приймальних пристроїв в кутомірних радіонавігаційних системах найчастіше використовуються амплітудні радіопеленгатори. Такі пеленгатори визначають напрямок на передавальну радіостанцію в залежності від амплітуди прийнятого сигналу. Амплітудний радіопеленгатор складається з антенної системи, приймального пристрою та індикатора.
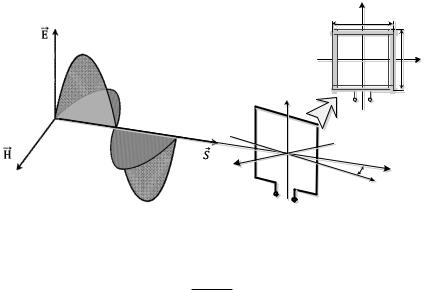
Антенна система радіопеленгатора призначена для прийому електромагнітних коливань, що випромінюються радіопередавачем. У сучасних радіопеленгаторах для визначення напрямку на джерело випромінювання найчастіше використовується метод пеленгування за мінімумом сигналу. Наявність мінімумів у ДН обумовлює застосування рамочних, рознесених, гоніометричних та комбінованих антенних систем.
Прикладом радіопеленгатора сучасного повітряного судна є автоматичний радіокомпас (АРК)
Рамкові антени застосовуються в АРК. Рамкова антена являє собою декілька вертикально розташованих витків електричного провідника, послідовно намотаних на осердя з високою магнітною проникністю. Кожен виток виконаний у вигляді прямокутника (рис. 2.9). Геометричний розмір d витка обирається значно меншим за довжину хвилі коливань, що приймаються.
Y |
|
|
d |
|
h |
О |
X |
Y
О
Z |
О |
|
|
|
θ |
|
X |
|
+ ер - |
Рис. 2.8. Виток рамкової антени АРК
При дії на рамку електромагнітного поля вертикальної поляризації в антені наводиться ЕРС, що дорівнює
ер Ет 2 Sn cos sin t ,
де Em – амплітуда напруженості електричного поля; S – площа рамки; п – кількість витків; – магнітна проникність середовища;
– довжина ЕМХ; – кут, утворений напрямком поширення

радіохвилі та площею рамки; - кругова частота електромагнітного поля.
Звідси амплітуда ЕРС, що наводиться у рамці, визначається:
Етр Ет 2 Sn cos .
Аналіз цієї формули показує, що Emp змінюється за косинусоїдальним законом у залежності від напрямку прийому ЕМХ. Діаграма направленості (ДН) такої антени у горизонтальній площині має форму вісімки (рис. 2.9).
|
Z |
|
|
Emp |
|
|
|
θ |
- |
+ |
X |
|
Рис. 2.9 Діаграма направленості рамкової антени
Недоліком рамкових антен є наявність поляризаційних помилок через наведення ЕРС у горизонтальних частинах рамки при прийомі сигналів, які мають нахил площини поляризації хвилі.
У наземних радіопеленгаторах використовуються рознесені антени, що складаються з двох всюдинапрямлених вертикальних вібраторів (рис. 2.10).
e1 |
d |
e2 |
|
ec |
|
До ПРМ Рис. 2.10. Рознесені антени наземних радіопеленгаторів
Відстань між вібраторами вибирається значно меншою за довжину хвилі сигналу, що приймається. Вібратори вмикаються у протифазі, тому вихідний сигнал такої антенної системи дорівнює:

ес е1 е2 |
d |
|
|
2Ет hsin |
|
cos sin t , |
|
|
|
|
|
де e1, e2 – ЕРС, що наводяться у вертикальних вібраторах; h – діюча висота антенної системи; d – відстань між вертикальними вібраторами.
Із даного виразу випливає, що рознесені антени мають таку ж ДН, що і рамочні. Проте на відміну від них рознесені антени вільні від поляризаційних помилок при пеленгуванні, оскільки горизонтальні з’єднувальні дроти антенної системи екрануються.
Недоліком антен цього типу є мале значення діючої висоти. Рознесені антени застосовуються у наземних пеленгаторах, що пояснюється можливістю значного збільшення геометричних розмірів антени.
В наземних та бортових радіопеленгаторах знайшли широке застосування комбіновані антенні системи. До складу такої антенної системи входить рознесена або рамочна антена та вертикальна ненапрямлена антена (рис. 2.11).
Рамочна антена Ненапрямлена
антена
ер |
еа
Контур |
ек |
|
Приймач |
|
|
|
|
|
|
|
|||
додавання |
|
|
радіопеленгатора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.11. Комбінована антенна система
Якщо Emp max – амплітуда ЕРС, що наводиться в рамці у напрямку максимального прийому, а Ema – амплітуда ЕРС ненапрямленої антени, то амплітуду сумарного сигналу комбінованої антенної системи Emк (при умові Emp max= Ema) можна записати виразом:
Етк
ДН такої антенної системи являє собою кардіоіду (рис. 2.12).

Z
Emр
|
|
|
θ |
- |
|
+ |
X |
|
|
||
|
|
а) |
|
Z |
|
|
Emк |
Ema |
|
|
|
Emp |
|
|
|
|
|
θ |
|
- |
+ |
|
X |
|
|
||
+ |
|
|
|
в) |
|
|
|
|
Z |
Ema |
|
|
θ |
|
X |
|
+ |
|
б) |
Z |
Emк |
|
|
|
θ |
|
X |
|
+ |
|
г) |
Рис. 2.12. Створення кардіоїди – ДН комбінованої антенної системи
На рис. 2.12 представлено моменти створення кардіоїди - діаграми направленості комбінованої антенної системи: а) ДН рамкової або рознесеної антени; б) ДН ненаправленої антени; в) формування комплексної ДН; г) кардіоїда – ДН комбінованої антенної системи.
При пеленгуванні за допомогою лише рамочних або лише рознесених антен виникає невизначеність на ±180 у визначенні напрямку на передавальний пристрій через наявність двох мінімумів ДН. Кардіоїда має лише одне значення мінімуму, завдяки чому забезпечується однозначність визначення напрямку на передавальну радіостанцію.
Пеленгування радіопередавача обумовлене зміною положення ДН антенної системи. Це здійснюється механічним обертанням рамочних антен або використанням гоніометричних антенних систем, які дозволяють не змінювати положення антен. До складу таких систем входять дві рамочні антени, розташовані в одній площині взаємно перпендикулярно, і гоніометр (рис. 2.13), який складається з двох нерухомих взаємно перпендикулярних
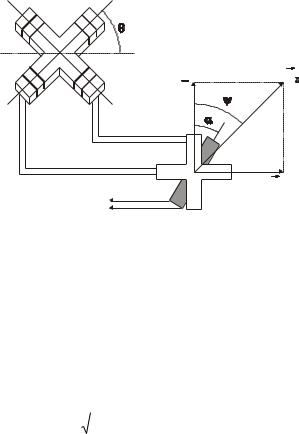
статорних котушок, з’єднаних з рамочними антенами, та пошукової котушки, яка обертається усередині статорних котушок і з’єднана зі входом приймача.
З |
Пн |
|
Гоніометр |
|
Н |
|
Н1 |
Пд |
С |
|
|
|
Н2 |
до ПРМ
Рис. 2.13. Схема гоніометричної системи
Припустимо, що передавач розташований під кутом до площини витків першої рамки (рис. 2.13). В цьому випадку ЕРС, що наводяться у першій та другій антенах, відповідно дорівнюють:
е Е |
т |
cos sin t ; |
е Е |
т |
sin sin t . |
||
1 |
|
|
2 |
|
|
||
Наявність |
ЕРС в антенах |
викликає |
протікання струмів у |
||||
статорних котушках гоніометру і створення усередині гоніометра магнітних полів:
H1 Hm cos sin t ; |
|
H2 |
Hm sin sin t . |
|||||
При цьому величина сумарного вектора напруженості |
||||||||
магнітного поля відповідає |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
H |
|
|
H 2 |
H 2 |
H |
m |
sin t , |
|
|
|
1 |
2 |
|
|
|||
а кут між векторами HΣ та H1 визначається із виразу: |
||||||||
tg |
Hm sin sin t |
|
tg . |
|||||
Hm cos sin t |
||||||||
Якщо у такому магнітному полі розташувати пошукову котушку, то в неї буде наводитись ЕРС:
ep Em sin sin t ,