

Higher_Mathematics_Part_1
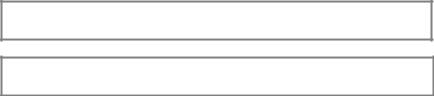
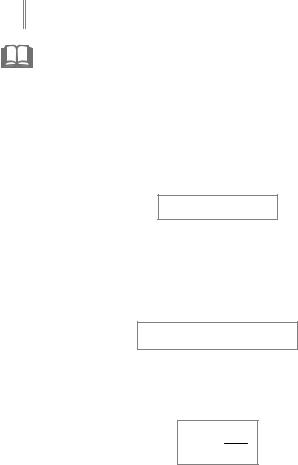
.pdfDefinition 1.30. Projection of a vector a on an axis l is called a positive number | A1B1 | , if the axis l and the vector A1 B1 are equally directed (Fig.
1.3, а), and a negative number − | A1B1 | , if the axis l and the vector A1 B1 are opposite directed (Fig. 1.3, b).
Projection of a vector a to an axis l is designated as: Prl a .
If φ is an angle between a direction of the axis l and a direction of the vector a , then
|
|
|
|
Prl a = |
|
a |
|
cos ϕ. |
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
В |
|
|
|
|
|
А |
a |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
А |
|
φ |
|
|
|
|
|
|
|
|
|
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
А1 |
|
|
В1 |
l |
А1 |
В1 |
l |
||||||
|
|
|
а |
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
Fig. 1.3 |
|
|
|
|
|
||||
Thus Pr |
l |
a > 0 , if an angle 0 ≤ ϕ < π , |
Pr a < 0 if |
π < ϕ ≤ π . |
|
||||||||
|
|
|
2 |
|
|
l |
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
4.4. Linear dependence and independence of vectors. Basis
Definition 1.31. An expression of such a kind as
x1a1 + x2 a2 + ... + xn an
is called a linear combination of vectors a1 , a2 , ... , an .
Definition 1.32. Vectors a1 , a2 , ... , an are called linearly dependent if there are exist such numbers c1 , c2 ,..., cn not all equal to zero, that their linear combination c1a1 + c2 a2 + ... + cn an = 0 , and linearly independent if this equality is carried out only if all numbers c1 , c2 , ..., cn equal to zero.
61
A set of linearly independent vectors a1 , a2 , ... , an is called a basis of space
Rn |
if for each vector b in |
Rn |
there exist such real numbers |
x , |
x , ..., |
x , |
|
|
|
|
|
|
1 |
2 |
n |
that |
b = x1a1 + x2 a2 + ... + xn an . |
|
|
|
|
||
|
This |
equality is called |
an |
expansion of the vector b |
in |
the basis |
|
a1 , a2 , |
... , an . |
|
|
|
|
|
|
|
|
|
|||||
|
Definition 1.33. Arbitrary nonzero vector on a straight line is called |
a |
|||||
basis on this straight line. |
|
|
|
|
|
||
If a vector a is a basis on a straight line then there is a unique expansion of a
vector b such that b = λa , where λ is the coordinate of the vector b in the basis a .
Definition 1.34. An arbitrary ordered pair of noncollinear vectors is called a basis on a plane.
Definition 1.35. An arbitrary ordered triple of noncomplanar vectors is called a basis in space.
If vectors a , b and c are basis in space and a vector d is d = αa + βb + γc, then α, β, γ are coordinates of the vector d in the given basis.
4.5. Cartesian coordinate system
Any coordinate system in space is given by a point O and three non-coplanar ordered vectors e1, e2 , e3 (basis).
The point O is called an origin of coordinate system and straight lines passing through the origin in a direction of basic vectors are called axes of coordinates.
They are usually labeled as x-axis, y-axis, z-axis.
We consider basis i , j, k such that: | i |= 1, | j |= 1, | k |= 1 and
i j, j k , i k . Such basis is called orthonormal basis.
Coordinate system in space with orthonormal basis is called the Cartesian coordinate system.
If to connect any point M in space with the origin O we can consider a vector
r = OM called a radius-vector of the point M relative to the point O. Then there are three unique numbers (x, y, z) such that
62
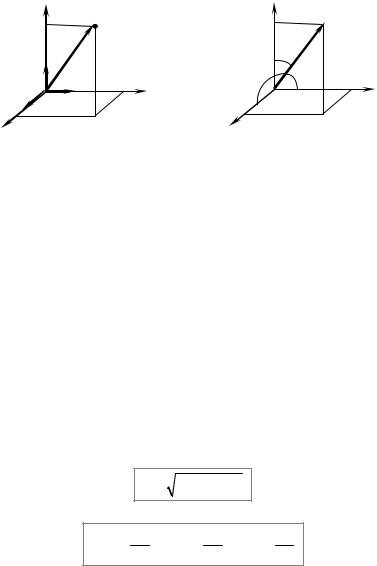
r = xi + yj + zk.
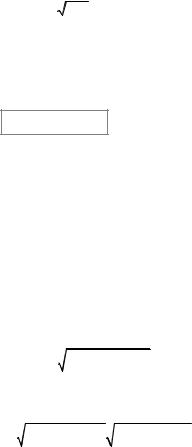
Coordinates x, y, z of a radius-vector OM are called coordinates of a point M and are designated as M (x, y, z) (Fig. 1.4).
z |
|
М(х, у, z) |
|
k |
|
у |
|
|
j |
||
i |
у |
||
|
|||
х |
|
|
|
х |
|
|
|
|
Fig. 1.4 |
|
z |
|
|
аz |
|
|
|
|
aG |
|
γ |
ау |
α |
β |
|
|
у |
|
ах |
|
|
х |
|
|
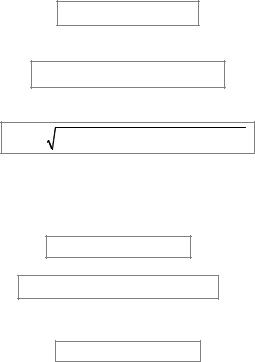
Fig. 1.5
4.6. Vectors in CCS
Let a vector |
a |
be given in CCS (Fig. 1.5). In the basis i , j, |
k |
the vector a |
||||||||||||||||||||
may be decomposed as |
a = axi + ay j + azk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
. It is denoted as |
a = {a x , |
a y , a z }. |
|
|||||||||||||||||||||
Here |
ax , ay , |
az |
are coordinates of the vector |
|
a |
in this |
basis. |
These |
||||||||||||||||
coordinates are projections of the vector a on coordinate axes, i.e. |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
ax = Prx a = |
|
|
|
|
a |
|
|
|
|
|
cosα, |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
ay = Pry a = |
|
a |
|
cosβ, |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
where α, |
β, γ |
|
|
|
az = Prz a = |
|
a |
|
cos γ, |
a |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|||||||||||||||||||||
are angles formed by the vector |
with |
coordinate axes |
||||||||||||||||||||||
Οx ,Οy ,Οz respectively.
The length (module) of the vector a can be found by the formula
| a |= ax2 + a2y + az2 .
Then
cos α = |aax | , cos β = |aay | , cos γ = |aaz | .
63
Definition 1.36. cos α , cos β , cos γ are called directing cosines of the vector a . They define the direction of the vector a and satisfy the condition
cos2 α + cos2 β + cos2 γ = 1.
If A(x1 , y1 , z1 ) and B(x2 , y2 , z2 ) , then
AB = (x2 − x1, y2 − y1, z2 − z1).
The length of the vector AB is written down as:
| AB |= (x − x )2 |
+ ( y |
2 |
− y )2 |
+ (z |
2 |
− z )2 . |
|
2 |
1 |
|
1 |
|
1 |
||
Let vectors be given by their coordinates, i.e.
a = (xa , ya , za ) , b = (xb , yb , zb ),
then
λ a = (λ x a , λ y a , λ z a )
a + b = (xa + xb , ya + yb , za + zb ).
Definition 1.37. Vectors a and b are equal if their coordinates are equal:
xa = xb , ya = yb , za = zb .
Vectors a and b are collinear if their coordinates are proportional:
|
|
xa |
|
= |
ya |
= |
za |
|
|
|
|
x |
|
|
y |
z |
|
||
|
|
b |
|
|
b |
b |
|
||
4.7. Division of line segment according to a given ratio |
|||||||||
Let a line segment АВ be |
defined |
by the points A(x1, y1, z1 ) and |
|||||||
B (x2 , y2 , z2 ) . Then coordinates of a point M(x, y, z) dividing this segment in the ratio | AM |:| MB |= λ may be found by the formulas:
x = |
x1 + λx2 |
y = |
y1 + λy2 |
z = |
z1 + λz2 |
|
|
|
|
||||
1+ λ |
1+ λ |
1+ λ |
|
|||
|
|
|
|
64
Coordinates of the point dividing a segment in half |
( |
λ = 1 , are: |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = |
|
x1 + x2 |
y = |
y1 + y2 |
z = |
z1 + z2 |
. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Micromodule 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
EXAMPLES OF PROBLEMS SOLUTION |
|
|
|
|
|
||||||||||||||||||||||||||||||||
Example 1. The points M1 (3 ; 3; −2) |
M 2 (0 ; 1; 4) |
|
are given. Find |
|
||||||||||||||||||||||||||||||||||||
а) coordinates, the length, directing cosines and ort of the vector M1M 2 ; |
||||||||||||||||||||||||||||||||||||||||
b) coordinates |
of a the point |
M dividing |
a segment |
|
M1M 2 in |
the |
ratio |
|||||||||||||||||||||||||||||||||
| M1M |:| MM2 |= 2 : 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Solution. а) M1M2 |
= (0 − 3 ; 1− 3; 4 − (−2)) = (−3; |
|
−2; |
6) ; |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
| M1M 2 |= |
9 + 4 + 36 = 7 ; |
|
cos α = |
−3 |
, |
cos β = |
|
−2 |
, |
cos γ = |
6 |
. |
|
|||||||||||||||||||||||||||
7 |
7 |
|
7 |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
An ort of the vector M1M 2 |
is the following: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
e = {cos α, cos β, |
cos γ} = {−3 / 7; −2 / 7; |
6 / 7} ; |
|
|
|
|
|
||||||||||||||||||||||||||||||
b) λ = |
2 |
, then |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 + |
2 |
0 |
|
9 |
|
|
|
|
|
3 + 2 1 |
|
11 |
|
|
|
−2 + |
2 |
4 |
|
2 |
|
|
|
|||||||||||||||||
xM = |
|
3 |
|
|
|
= |
|
, yM = |
3 |
|
= |
, zM = |
|
|
|
|
|
3 |
|
= |
. |
|
|
|||||||||||||||||
|
|
|
|
|
5 |
|
1+ 2 |
|
5 |
1 |
+ |
2 |
|
5 |
|
|
||||||||||||||||||||||||
1+ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
||||
Example 2. Find a vector |
a = {ax ; ay ; az } |
forming identical angles with |
||||||||||||||||||||||||||||||||||||||
coordinate axes provided |
|
a |
|
= 2 |
3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Solution. Taking into account the equalities |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
ax |
=| a | cos α , ay |
=| a | cos β , |
az =| a | cos γ |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
and a condition α = β = γ |
|
we write down that |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
cos2 α + cos2 α + cos2 α = 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
We get cos2 α = |
|
1 |
|
, |
cos α = ± |
1 |
, |
ax |
= ay = az |
= 2 |
|
3 |
1 |
|
= 2 |
or |
ax = |
|||||||||||||||||||||||
3 |
|
|
|
3 |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
= ay = az = −2 . The final answer is a = {2; |
2; 2} or a = {−2; |
−2; |
|
−2} . |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
65 |

Example 3. Given |
|
vectors |
a = |
{ |
|
|
|
|
|
} |
and b = |
{ |
4; 2; |
} |
|||||||||||||||||||||
|
1; |
|
−2; 3 |
|
−1 |
. Define |
|||||||||||||||||||||||||||||
whether the vectors c1 = 2a − 5b |
and c2 |
|
= a − 2b |
are collinear. |
|
|
|||||||||||||||||||||||||||||
Solution. We get |
{ |
|
|
|
} |
|
|
|
{ |
|
|
|
|
|
} |
|
|
{ |
|
|
|
|
|
} |
|
||||||||||
|
|
1 |
= 2a − 5b = |
2; |
−4; |
|
|
|
|
20; 10; |
|
= |
−18; |
|
−14; |
, |
|||||||||||||||||||
|
|
|
c |
|
6 − |
|
|
−5 |
{ |
|
11 |
||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
{ |
|
|
} |
− |
{ |
8; 4; |
} |
= |
−7; |
|
} |
|
|
||||||||||||
|
|
|
|
|
c |
|
= a − 2b = 1; −2; 3 |
|
|
−2 |
|
|
−6; 5 . |
|
|||||||||||||||||||||
As the coordinates of the vectors c1 |
|
and c2 |
are not proportional, vectors are |
||||||||||||||||||||||||||||||||
not collinear. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Micromodule 4 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
CLASS AND HOME ASSIGNMENTS |
|
|
||||||||||||||||||||||||
1. The points M1(−4; 5; |
−6), M 2 (5; |
|
−7; 2) |
are given. Find: |
|
|
|||||||||||||||||||||||||||||
a) coordinates, length, directing cosines and an ort of the vector M1M 2 ; |
|||||||||||||||||||||||||||||||||||
b) coordinates of a point M which divides a segment |
|
M1M 2 in the ratio |
|||||||||||||||||||||||||||||||||
| M1M |:| MM 2 | = 3 : 5 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2. Find the vector a = {ax ; ay ; az } |
|
if it forms with axes Ox and Oy angles |
|||||||||||||||||||||||||||||||||
α = |
π |
and β = |
π |
respectively, and |
|
a |
|
= 6 . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
4 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3. Define whether the vectors c1 = −a + 4b and c2 |
|
= 3a − 2b , constructed on |
|||||||||||||||||||||||||||||||||
vectors a = |
{ |
2; |
} |
and b = |
{ |
3; 1; |
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
−2; 3 |
|
|
|
−1 are collinear. |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Answers |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1. |
|
а) M M |
2 |
= {9; − 12; 8}; |
cos α = |
9 |
|
, cos β = − |
12 |
, cos γ = |
8 |
; |
b) M (−5 / 8; |
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
17 |
|
|
|
17 |
|
|
|
|
17 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
0,5; |
|
−3). 2. |
|
a = {3 2; 3; ± 3} . 3. No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Micromodule 4
SELF–TEST ASSIGNMENTS
4.1. Two points M1 and M2 are given. Find:
а) coordinates, the length, directing cosines, an ort of a vector M1M 2 ;
b)coordinates of the point M, if M1M : MM 2 = m : n ;
c)coordinates of the point M2 , if M1M3 = λM1M2 .
66
4.1.1. |
M1 (1; 2; − 1) , M 2 (3; 4; − 2) , m : n = 2 : 5 , λ = 3 . |
||||
4.1.2. |
M1 (−2; 0; − 4), |
M 2 (−4; 1; − 2) , m : n = 3 :1, |
λ = 2 . |
||
4.1.3. |
M1 |
(−5;1; 4), M2 (1; 3; 1) , m : n = 3 : 2 , λ = 4 . |
|||
4.1.4. |
M1 (5; − 1; − 4), |
M 2 (11; 1; − 1) , |
m : n = 2 :1, |
λ = −2 . |
|
4.1.5. |
M1 |
(−3; − 1; 8), |
M2 (−7; − 5; 6) , |
m : n = 1: 4, |
λ = −3 . |
4.1.6. |
M1 |
(15; − 2; − 14), M2 (11; 0; 10) , m : n = 2 : 3, λ = 4 . |
|||
4.1.7.M1 (−8; − 12; 3), M2 (0; − 3; 15) , m : n=1:5, λ = –2.
4.1.8.M1 (10; − 5; − 4), M2 (1; 7; 5) , m : n=3:5, λ = –3.
4.1.9.М1(5; 2; –6), М2(25; –10; 3), m : n = 4:5, λ = 3.
4.1.10.М1(–3; –2; 16), М2(9; 18; 7), m : n = 2:3, λ = –2.
4.1.11.М1(–1; 8; 26), М2(23; 0; 20), m : n = 3:2, λ = –4.
4.1.12.М1(–7; 7; 15), М2(–1; –1; –9), m : n = 2:7, λ =2.
4.1.13.М1(–4; 5; 22), М2(4; –1; –2), m : n = 6:5, λ = 4.
4.1.14.М1(1; –8; 12), М2(25; –2; 4), m : n = 1:2, λ = –2.
4.1.15.М1(4; 9; 14), М2(–2; –15; 22), m : n = 1:3, λ = –3.
4.1.16.М1(–5; 17; 21), М2(4; 5; 1), m : n = 4:3, λ = –5.
4.1.17.М1(2; 11; 33), М2(22; –1; 24), m : n = 4:1, λ = 4.
4.1.18.М1(–7; 4; 13), М2(1; –5; 1), m : n=5:3, λ = –6.
4.1.19.М1(3; –8; 14), М2(–9; 1; 6), m : n = 5:2, λ = 5.
4.1.20.М1(–9; 3; 5), М2(0; 15; 13), m : n = 4:7, λ = –1.
4.1.21.М1(–1; 4; 12), М2(3; 0; 10), m : n = 6:7, λ = –2.
4.1.22.М1(2; 6; 4), М2(6; 4; 8), m : n = 2:1, λ = –3.
4.1.23.М1(–11; 16; 1), М2(–5; 10; 4), m : n = 3:4, λ = 2.
4.1.24.М1(–14; –3; 2), М2(–8; 3; –1), m : n = 4:5, λ = –3.
4.1.25.М1(2; 4; 7), М2(4; 7; 1), m : n = 2:3, λ = 4.
4.1.26.М1(–11; 18; 36), М2(1; 14; 30), m : n = 4:5, λ = –2.
4.1.27.М1(–4; –3; 0), М2(2; 1; 12), m : n = 1:6, λ = –4.
4.1.28.М1(9; 4; 16), М2(49; 28; –2), m : n = 4:3, λ = 2.
4.1.29.М1(0; 5; 21), М2(18; 11; 12), m : n = 6:5, λ = 3.
4.1.30.М1(–3; 5; 20), М2(3; 14; 2), m : n = 1:4, λ = –5.
67
4.2. Define whether the vectors c1 and c2 , constructed on vectors a and b are collinear.
4.2.1. |
a = |
{ |
1; |
−2; |
|
|
} |
, b |
= |
{ |
3; |
|
0; |
|
|
} |
, |
|
1 |
|
= 2a + 4b , |
|
|
2 |
|
|
= 3b − a . |
|||||||||||||||
{ |
|
3 |
|
|
|
−1 |
|
|
c |
|
|
c |
|
|
||||||||||||||||||||||||||||
4.2.2. |
a = |
1; 0; |
|
} |
, b = |
{ |
−2; |
|
|
3; |
} |
, |
1 |
|
|
|
|
2 |
= 3a − b . |
|||||||||||||||||||||||
{ |
1 |
|
|
|
|
|
5 |
|
c |
|
= a + 2b , c |
|||||||||||||||||||||||||||||||
4.2.3. |
a = |
−2; |
4; |
|
} |
, b |
= |
{ |
1; |
|
−2; |
|
} |
, |
|
|
1 |
|
= 5a + 3b , |
|
|
2 |
|
|
= 2a − b . |
|||||||||||||||||
{ |
|
1 |
|
{ |
|
7 |
|
|
c |
|
c |
|
|
|||||||||||||||||||||||||||||
4.2.4. |
a = |
1; |
2; |
|
|
} |
, b |
= |
2; |
|
−1; |
|
|
|
} |
|
, |
|
|
1 |
|
= 4a + 3b |
, |
|
c |
2 |
= 8a − b . |
|||||||||||||||
{ |
−3 |
|
|
|
|
−1 |
|
c |
|
|
|
|
||||||||||||||||||||||||||||||
4.2.5. |
a = |
3; |
5; |
|
} |
, b = |
{ |
5; |
|
|
9; |
|
} |
|
, |
|
1 |
|
|
|
|
|
2 |
|
= 3a − 2b . |
|||||||||||||||||
{ |
4 |
|
|
|
|
|
7 |
|
c |
|
= −2a + b , c |
|
|
|||||||||||||||||||||||||||||
4.2.6. |
a = |
1; |
4; |
|
|
} |
, b |
= |
{ |
1; |
|
1; |
|
|
|
} |
|
|
|
1 |
|
|
|
2 |
= 4a + 2b . |
|||||||||||||||||
{ |
−2 |
|
{ |
|
−1 |
, c |
|
= a + b , c |
||||||||||||||||||||||||||||||||||
4.2.7. |
a = |
1; |
−2; |
|
|
} |
, b |
= |
3; |
|
−1; |
|
|
} |
, |
|
1 |
|
= 4a − 2b , |
|
|
2 |
|
|
= b − 2a . |
|||||||||||||||||
{ |
|
5 |
|
|
|
0 |
|
|
c |
|
|
c |
|
|
||||||||||||||||||||||||||||
4.2.8. |
a = |
3; |
4; |
|
|
} |
, b |
= |
{ |
2; |
|
−1; |
|
} |
, |
|
1 |
|
= 6a − 3b , |
c |
2 |
|
= b − 2a . |
|||||||||||||||||||
{ |
−1 |
|
|
1 |
|
|
c |
|
|
|
|
|||||||||||||||||||||||||||||||
4.2.9. |
a = |
−2; |
−3; |
|
|
|
} |
, b = |
{ |
1; |
0; |
|
|
|
} |
|
|
|
1 |
= 3a − 9b |
, |
|
c |
2 |
= −3b − a . |
|||||||||||||||||
|
|
−2 |
|
|
|
5 |
|
, c |
|
|
|
|
||||||||||||||||||||||||||||||
4.2.10. a = |
|
{ |
−1; |
4; |
|
|
|
} |
, b |
|
= |
{ |
|
3; |
|
−2; |
|
|
} |
, |
|
|
1 |
|
= 2a − b , |
|
2 |
|
= 3b − 6a . |
|||||||||||||
|
{ |
|
|
2 |
|
{ |
|
|
|
6 |
|
|
c |
|
c |
|
|
|||||||||||||||||||||||||
4.2.11. a = |
|
5; |
0; |
|
|
|
|
} |
, b = |
7; |
|
2; |
|
} |
, |
|
|
1 |
|
|
|
2 |
= 3b + 6a . |
|||||||||||||||||||
|
{ |
|
|
−1 |
{ |
|
|
3 |
|
|
c |
|
= 2a − b , c |
|
|
|||||||||||||||||||||||||||
4.2.12. a = |
|
0; |
3; |
|
|
|
|
} |
, b |
|
= |
1; |
|
−2; |
|
|
} |
, |
|
1 |
= 5a − 2b |
, |
|
|
2 |
= 5b + 3a . |
||||||||||||||||
|
{ |
|
|
−2 |
|
|
|
|
|
1 |
|
c |
|
|
c |
|
||||||||||||||||||||||||||
4.2.13. a = |
|
−2; |
7; |
|
|
|
} |
, b = |
|
{ |
−3; |
5; |
|
|
|
} |
, |
|
|
1 |
|
|
|
|
|
c |
2 |
|||||||||||||||
|
{ |
|
−1 |
|
|
|
2 |
c = 2a + 3b , |
|
|
= 2b + 3a . |
|||||||||||||||||||||||||||||||
4.2.14. a = |
|
3; |
7; |
|
|
} |
, b |
= |
{ |
1; |
|
−3; |
|
|
} |
, |
|
|
1 |
|
= 4a − 2b , |
|
|
2 |
|
= b − 2a . |
||||||||||||||||
|
{ |
|
|
0 |
|
{ |
|
|
4 |
|
|
c |
|
c |
|
|
||||||||||||||||||||||||||
4.2.15. a = |
|
3; |
7; |
|
|
} |
, b |
= |
1; |
|
−3; |
|
|
} |
, |
|
|
1 |
|
= 4a − 2b , |
|
|
2 |
|
= b + 2a . |
|||||||||||||||||
|
{ |
|
|
0 |
|
|
|
|
4 |
|
|
c |
|
c |
|
|
||||||||||||||||||||||||||
4.2.16. a = |
|
3; |
−2; |
|
|
|
} |
, b |
|
= |
{ |
|
3; |
|
0; |
|
|
|
} |
, |
|
|
1 |
|
|
|
|
|
|
2 |
= 4b − a . |
|||||||||||
|
{ |
|
|
0 |
|
|
|
|
|
|
−4 |
|
|
c |
|
= 2a + 3b , c |
|
|||||||||||||||||||||||||
4.2.17. a = |
|
2; |
0; |
|
|
} |
, b |
= |
{ |
−2; |
|
3; |
|
|
} |
|
, |
|
1 |
|
= a − 2b , |
|
|
2 |
|
|
= 4b − 3a . |
|||||||||||||||
|
{ |
|
1 |
|
|
|
−5 |
|
|
c |
|
|
c |
|
|
|||||||||||||||||||||||||||
4.2.18. a = |
|
−3; |
4; |
|
|
|
} |
, b = |
|
{ |
|
|
−2; |
|
|
} |
, |
|
|
1 |
|
|
|
|
|
2 |
||||||||||||||||
|
{ |
|
−1 |
|
1; |
|
6 |
|
|
c |
= 4a + 3b , |
|
c |
= 3a − b . |
||||||||||||||||||||||||||||
4.2.19. a = |
|
|
4; |
|
|
|
|
} |
, b = |
{ |
2; |
|
1; |
|
|
|
} |
, |
|
1 |
= 4a + 3b |
, |
|
|
2 |
= 6a − b . |
||||||||||||||||
|
1; |
|
−3 |
|
|
|
|
−1 |
|
c |
|
|
c |
|
||||||||||||||||||||||||||||
4.2.20. a = |
|
{ |
3; |
5; |
|
|
} |
, b |
= |
{ |
5; |
|
0; |
|
} |
, |
|
|
1 |
= −2a + 3b , |
|
2 |
|
= 3a − 2b . |
||||||||||||||||||
|
{ |
|
2 |
|
|
|
7 |
|
c |
c |
|
|
||||||||||||||||||||||||||||||
4.2.21. a = |
|
0; |
4; |
|
|
|
|
} |
, b |
|
= |
{ |
4; |
|
1; |
|
|
} |
|
, |
|
1 |
|
|
2 |
= 5a + 2b . |
||||||||||||||||
|
{ |
|
|
−3 |
|
|
|
|
|
−1 |
|
c |
|
|
= a + b , c |
|
||||||||||||||||||||||||||
4.2.22. a = |
|
1; |
−2; |
|
|
|
} |
, b = |
{ |
3; |
|
−1; |
|
|
} |
, |
|
1 |
= 4a − b , |
2 |
= b − 3a . |
|||||||||||||||||||||
|
{ |
|
3 |
|
|
|
1 |
c |
|
c |
|
|
||||||||||||||||||||||||||||||
4.2.23. a = |
|
4; |
4; |
|
|
|
|
} |
, b |
|
= |
{ |
|
2; |
|
−1; |
|
|
} |
|
, |
|
|
1 |
|
= 5a − 3a |
, |
|
|
2 |
= b − 4a . |
|||||||||||
|
{ |
|
|
−1 |
|
{ |
|
|
|
3 |
|
c |
|
|
c |
|
|
|||||||||||||||||||||||||
4.2.24. a = |
|
2; |
3; |
|
|
|
|
} |
, b |
|
= |
1; |
|
0; |
|
} |
|
|
1 |
= 3a − 7b , |
c |
2 |
= −2b − a . |
|||||||||||||||||||
|
{ |
|
|
−2 |
|
{ |
|
3 |
|
, c |
|
|
|
|||||||||||||||||||||||||||||
4.2.25. a = |
|
−1; |
4; |
|
|
|
} |
, b = |
3; |
|
−2; |
|
|
} |
, |
|
1 |
= 2a − b , |
c |
2 |
|
= 3b − 4a . |
||||||||||||||||||||
|
{ |
|
|
3 |
{ |
|
|
1 |
|
c |
|
|
|
|||||||||||||||||||||||||||||
4.2.26. a = |
|
3; |
0; |
|
|
|
|
} |
, b = |
7; |
|
2; |
|
} |
, |
|
|
1 |
|
|
|
2 |
= 3b + 2a . |
|||||||||||||||||||
|
|
|
−1 |
|
|
|
|
3 |
|
|
c |
|
= 2a − b , c |
|
|
|||||||||||||||||||||||||||
68
4.2.27. |
a = |
{ |
1; |
3; |
} |
, b = |
{ |
|
−2; |
} |
, |
1 |
= 5a − 2b |
, |
c |
2 |
= 4b + 3a . |
||||
{ |
−2 |
|
1; |
2 |
|
c |
|
|
|||||||||||||
4.2.28. |
a = |
|
|
|
|
} |
|
|
{ |
−3; |
1; |
|
} |
, |
|
1 |
|
, |
|
2 |
|
{ |
−2; 4; −1 , b = |
|
2 |
c = 2a + 3b |
c = 2b + a . |
||||||||||||||||
4.2.29. |
a = |
3; |
3; |
} |
, b = |
{ |
|
−3; |
} |
, |
1 |
= 4a − 2b , |
c |
2 |
= b − 2a . |
||||||
{ |
0 |
{ |
1; |
|
1 |
c |
|
|
|||||||||||||
4.2.30. |
a = |
3; |
2; |
} |
, b = |
1; |
|
−3; |
} |
, |
1 |
= 4a − 2b , |
|
2 |
= 2b + a . |
||||||
|
1 |
|
|
2 |
c |
|
c |
||||||||||||||
Micromodule 5
BASIC THEORETICAL INFORMATION.
DOT PRODUCT OF TWO VECTORS
Definition of dot product of two vectors, its properties and the coordinate form. Condition of perpendicularity of two vectors.
Literature: [1, chapter 4], [4, section 3, item 3.2], [6, chapter 2, § 4], [7, chapter 1, § 3], [10, chapter 1, § 2], [11, chapter 1, § 2].
5.1. Dot product of two vectors
Definition 1.38. Dot (scalar) product of two vectors a and b is the number
a b (or (a, b) ) equal to the product of lengths of these two vectors and a cosine of the angle between them:
a b =| a | | b | cos ϕ.
If one of vectors a or b is zero, then according to the definition
a b = 0.
If equalities | a | cos ϕ = Prb a , | b | cos ϕ = Pra b are true then a b =| b | Prb a =| a | Pra b.
The geometrical significance of the scalar product is next. The scalar product of two vectors is equal to the product of the length of one vector by a projection on it of the other vector.
Then
Prb a = a| bb| .
69
5.2. Properties of dot product
Algebraic properties of a dot product are
1) |
a b = b a ; |
2) (λa) b = λ(a b) ; |
3) |
a(b + c) = a b + a c . |
|
Geometrical properties of a dot product are next. |
||
1) |
If a ≠ 0 and b ≠ 0, then |
a b > 0 if the angle ϕ < 900, and a b < 0 if |
the angle ϕ ≥ 900.
2) A dot product of two nonzero vectors is equal to zero if and only if these vectors are perpendicular.
3) The scalar square of a vector is equal to a square of its length, i.e. a a = a2 =| a |2 .
Thus, |
| a |= a a . |
Condition of perpendicularity of two vectors
Two nonzero vectors a and b are perpendicular if and only if their scalar product is equal to zero:
a b a b = 0.
5.3. Representation of a dot product in coordinate form. An angle between two vectors
Let vectors a and b be a set determined by coordinates a = (ax , ay , az ) , b = (bx , by , bz ) .
Then |
a b = ax bx + ay by |
+ az bz . |
|
|
|
|||
Conclusions from this formula are the following: |
|
|
|
|||||
1) condition of perpendicularity of two vectors a and b : |
||||||||
|
ax bx + ay by + az bz = 0 ; |
|
|
|
||||
2) the length of the vector a is | a |= ax |
2 +ay |
2 +az |
2 |
; |
|
|||
3) a cosine of the angle between the vectors a and b is |
||||||||
cos ϕ = |
a b |
= |
axb x +ayby + azbz |
|
. |
|||
|
|
|
|
|
|
|||
|
| a || b | |
ax2 + ay2 + az2 bx2 + by2 + bz2 |
||||||
70