

Системы управления нпч.
Так как непосредственный преобразователь частоты фактически представляет собой реверсивный тиристорный преобразователь, то его схема управления имеет много общего с СУ РУВ. Однако, если на выходе НПЧ формируется напряжение регулируемой частоты и амплитуды, то схема управления значительно усложняется, особенно когда в качестве нагрузки используется реверсивный привод с электрической машиной переменного тока (асинхронный двигатель). Рассмотрим обобщенную структурную схему управления НЧП (рис. 14).
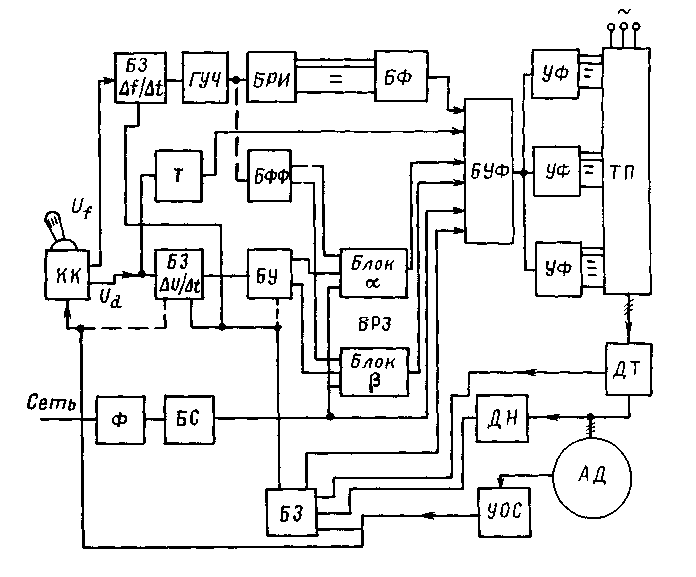
Рис. 14. СУ непосредственного преобразователя частоты
Как
указывалось ранее, при работе НЧП с
синусоидальным выходным сигналом
необходимо создать на выходе напряжение
заданной частоты, т. е. в СУ следует
предусмотреть блок, отвечающий за этот
параметр. Выходное напряжение меняется
в пределах формируемого интервала
по величине (среднему значению), т. е.
необходим блок формирования угла
![]() .
Для исключения одновременной работы
(при раздельном управлении) двух
тиристорных групп любая из них должна
включаться после прекращения прохождения
тока через вторую, для чего требуется
датчик состояния тиристоров, или датчик
тока.
.
Для исключения одновременной работы
(при раздельном управлении) двух
тиристорных групп любая из них должна
включаться после прекращения прохождения
тока через вторую, для чего требуется
датчик состояния тиристоров, или датчик
тока.
В СУ НЧП необходимо включить устройства управления фазой выходного напряжения (для реверса асинхронного двигателя АД, используемого в качестве нагрузки), устройства защиты,, блокировки и т. п.
Обычно
управление такими НЧП осуществляется
от какого-либо внешнего управляющего
органа, например командо-контроллера
КК.
В него при необходимости заводится и
сигнал обратной связи. На выходе КК
формируются два сигнала: Uf
задающий
выходную частоту, и Ud,
задающий
выходное напряжение. Эти сигналы могут
быть связаны программной зависимостью,
например
![]() ,
а могут быть и независимыми, тогдаКК
имеет две ручки управления.
,
а могут быть и независимыми, тогдаКК
имеет две ручки управления.
Рассмотрим
первую схему управления - по частоте.
Сигнал Uf
поступает
в блок задания интенсивности изменения
выходной частоты БЗ
![]() ,
служащий для плавного изменения выходной
частоты. Этот блок легко реализуется
на базе ОУ, выполняющего функции
апериодического звена 1-го порядка.
Далее сигнал проходит в генератор
управляемой частотыГУЧ
или преобразователь U/f,
который
определяет выходную частоту ТП. Если
входной сигнал Uf
отсутствует,
на выходе устанавливается (в зависимости
от задания) или нулевая частота, или
какая-то минимальная (например, 3 Гц).
,
служащий для плавного изменения выходной
частоты. Этот блок легко реализуется
на базе ОУ, выполняющего функции
апериодического звена 1-го порядка.
Далее сигнал проходит в генератор
управляемой частотыГУЧ
или преобразователь U/f,
который
определяет выходную частоту ТП. Если
входной сигнал Uf
отсутствует,
на выходе устанавливается (в зависимости
от задания) или нулевая частота, или
какая-то минимальная (например, 3 Гц).
После ГУЧ сигнал поступает в блок распределителя импульсов БРИ, который представляет собой кольцевой счетчик на шесть выходов, если НПЧ имеет в каждом плече трехфазную мостовую схему. В связи с этим частота ГУЧ выбирается в 6 раз больше fТП. После БРИ сигнал поступает в блок формирователей БФ, где осуществляется формирование управляющих импульсов.
Второй
канал управления включает: блок задания
интенсивности изменения выходного
напряжения БЗ
![]() (если необходимо изменять его
постепенно); блок усилителейБУ,
в который могут заводиться сигнал
обратной связи и сигнал от блока защиты;
блоки регулируемой задержки БРЗ
для регулирования угла
(если необходимо изменять его
постепенно); блок усилителейБУ,
в который могут заводиться сигнал
обратной связи и сигнал от блока защиты;
блоки регулируемой задержки БРЗ
для регулирования угла
![]() в выпрямительном режиме ТП и угла
в выпрямительном режиме ТП и угла![]() в инверторном. Эти блоки представляют
собой фазосмещающие устройства,
рассмотренные выше. На эти блоки также
поступает сигнал от блока синхронизацииБС.
Для улучшения работы схемы перед БС
обычно устанавливается фильтр Ф.
в инверторном. Эти блоки представляют
собой фазосмещающие устройства,
рассмотренные выше. На эти блоки также
поступает сигнал от блока синхронизацииБС.
Для улучшения работы схемы перед БС
обычно устанавливается фильтр Ф.
Следующим очень важным устройством схемы управления НПЧ является блок управления фазы БУФ. Назначение этого блока двоякое. Во-первых, по команде от логического элемента Т он изменяет направление вращения двигателя переключением последовательности подачи сигналов управления на тиристоры, формирующие выходную частоту ТП (например, А-В-С или А-С-В). Элемент Т представляет собой триггер, устанавливающийся в состояние 1, если командо-контроллером задано вращение двигателя в одну сторону, и в состояние 0 при обратном направлении. Второе назначение БУФ - сбор всех сигналов от систем защиты, блокировки и т. п., при поступлении которых запрещается работа СУ.
Блок управления фазой представляет собой логический автомат, как правило, с жесткой программой, собираемый на стандартных логических элементах. От БУФ сигналы поступают на блоки выходных каскадов, где они усиливаются, формируются и где осуществляется гальваническая развязка СУ от силовой части ТП. Затем эти сигналы подаются на управляющие электроды тиристоров.
Блок
защиты БЗ
получает информацию от датчиков тока
ДТ,
напряжения ДН,
от устройства обратной связи УОС
(если есть необходимость) и обеспечивает
отключение СУ при перегрузках (![]() ),
сверхтоках, сигнализирует о снижении
напряжения на нагрузке до минимального
значения (если это предусмотрено). При
перегрузке ТП обычно отключаются сигналы
управления на тиристоры, работающие в
режиме выпрямления, а те, которые работают
в режиме инвертирования, остаются
функционировать.
),
сверхтоках, сигнализирует о снижении
напряжения на нагрузке до минимального
значения (если это предусмотрено). При
перегрузке ТП обычно отключаются сигналы
управления на тиристоры, работающие в
режиме выпрямления, а те, которые работают
в режиме инвертирования, остаются
функционировать.
В
данной структурной схеме предусмотрено
регулирование углов
![]() и
и![]() только по сигналу отКК,
т. е. можно изменять напряжение на
нагрузке командным путем. В течение
периода формирования положительной
или отрицательной полуволны выходного
напряжения углы
только по сигналу отКК,
т. е. можно изменять напряжение на
нагрузке командным путем. В течение
периода формирования положительной
или отрицательной полуволны выходного
напряжения углы
![]() и
и![]() не меняются, т. е. не осуществляется
формирование синусоидальной формы
выходного напряжения. Чтобы выполнить
требование синусоидальной формы сигнала,
в СУ должен быть включен блок формирования
формыБФФ,
который осуществляет изменение угла
не меняются, т. е. не осуществляется
формирование синусоидальной формы
выходного напряжения. Чтобы выполнить
требование синусоидальной формы сигнала,
в СУ должен быть включен блок формирования
формыБФФ,
который осуществляет изменение угла
![]() (
(![]() )
по линейному или более сложному закону
в течение периода выходной частоты.
Однако с учетом изменения и самой этой
частоты (
)
по линейному или более сложному закону
в течение периода выходной частоты.
Однако с учетом изменения и самой этой
частоты (![]() )
схема блока сильно усложняется, и этот
метод применяете крайне редко.
)
схема блока сильно усложняется, и этот
метод применяете крайне редко.
Следует отметить, что, хотя схемы управления НЧП состоят из хорошо известных элементов (интеграторы, счетчики, усилители, логические элементы, компараторы и т. д.), но из-за большого числа силовых элементов (18...36) объем СУ резко возрастает и требуетеся точное согласование работы элементов во времени.
Рассмотренная выше схема является обобщенной, реальные СУ могут включать и ряд дополнительных узлов.
Рассмотрим еще одну простую и не очень стабильную, но получившую распространение схему тиристорного регулятора мощности, применяемую, например, в устройствах управления освещенностью. В схеме (рис. 15, а) использован не импульсно-фазовый, а амплитудно-фазовый метод управления. Она состоит из трансформатора Tр, фазорегулятора RC, тиристора VD1 и его нагрузки Rн. Как известно, изменяя величину сопротивления R, можно изменить фазу напряжения на выходе RC-цепи теоретически в пределах 0...180°, практически несколько меньше (20...160°). Как видно из диаграммы (рис. 15, б) при подаче на тиристор положительной полуволны напряжения питания а требуемое для включения тиристора напряжение управления меняется по кривой b, следовательно включение произойдет в момент пересечения кривой b с кривой а напряжения фазорегулятора. Изменяя фазу кривой а, можно менять момент включения тиристора почти от 0...180°, т. е. среднее значение напряжения на нагрузке меняется от 0 до 1/2 максимального значения (второй полупериод тиристор не работает). Если зашунтировать тиристор диодом VD2, то напряжение на нагрузке можно менять от 1/2 номинального до номинального. Силовая часть схемы может питаться от сети, тогда габариты трансформатора будут минимальны. Недостатки схемы - ограниченный диапазон регулирования и нестабильность работы из-за нестабильности характеристики b. Тем не менее в неответственных устройствах ее применение оправдано.

Рис. 15. СУ простейшего тиристорного регулятора