

ПЛАНИРОВАНИЕ
ЭКСПЕРИМЕНТА
Автор: Кузнецов Алексей Владимирович

Что такое планирование эксперимента
u1 |
|
Целью планирования эксперимента является создание |
y |
таких планов покачивания входных переменных, которые |
|
Объект |
обеспечивают более быстрое и точное построение модели |
|
um |
|
объекта. |
Выход объекта состоит из неизвестного сигнала (функции от входов) и центрированной помехи
y (u1, , um ) h
Что такое планирование эксперимента
n |
A |
B |
C |
yi |
1 |
– |
– |
– |
y1 |
2 |
+ |
– |
– |
y2 |
3 |
– |
+ |
– |
y3 |
4 |
– |
– |
+ |
y4 |
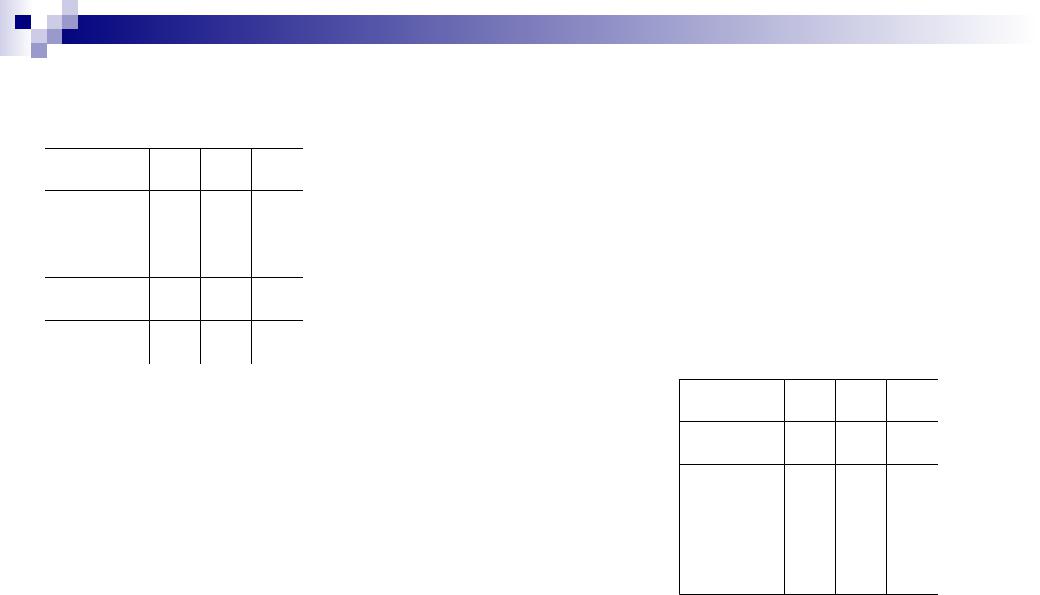
Взвешивание трех тел по традиционной схеме ("+" означает, что тело положено на весы, "–" указывает на отсутствие тела на весах).
σ2 (вес А )=σ2 ( y2− y1)=2 σ2 ( y )
Взвешивание трех тел с использованием |
|
|
|
n |
A |
B |
C |
yi |
||||||||
|
|
|
1 |
– |
– |
– |
y1 |
|||||||||
планирования эксперимента. |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
+ |
– |
– |
|
||||||
|
|
|
|
y1 y2 y3 y4 |
|
|
4 2 ( y) |
|
|
|
2 |
y2 |
||||
|
2 |
(вес А) |
2 |
|
|
2 |
( y) |
3 |
– |
+ |
– |
y3 |
||||
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
4 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
4 |
– |
– |
+ |
y4 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Видно, что при новой схеме взвешивания дисперсия веса объектов получается вдвое меньше, чем при традиционном методе взвешивания, хотя в обоих случаях выполнялось по четыре опыта.
 Построение линейной статической модели объекта
Построение линейной статической модели объекта
Считаем, что входами объекта являются u1,…,um, а выходом y. Уравнение линейной статической модели объекта имеет вид:
|
m |
0 |
) |
y 0 |
j (u j u j |
||
j 1
Необходимо на основе эксперимента (на основе нескольких измерений входов и выхода объекта ) вычислить коэффициенты модели.
u2 |
2 |
|
|
1 |
|
u0 |
|
|
|
u2 |
|
|
|
|
u2 |
||
2 |
|
|
|
||
|
|
u1 |
u1 |
||
|
4 |
3 |
u1 |
||
|
|
u0 |
|
|
|
|
|
1 |
|
|
|
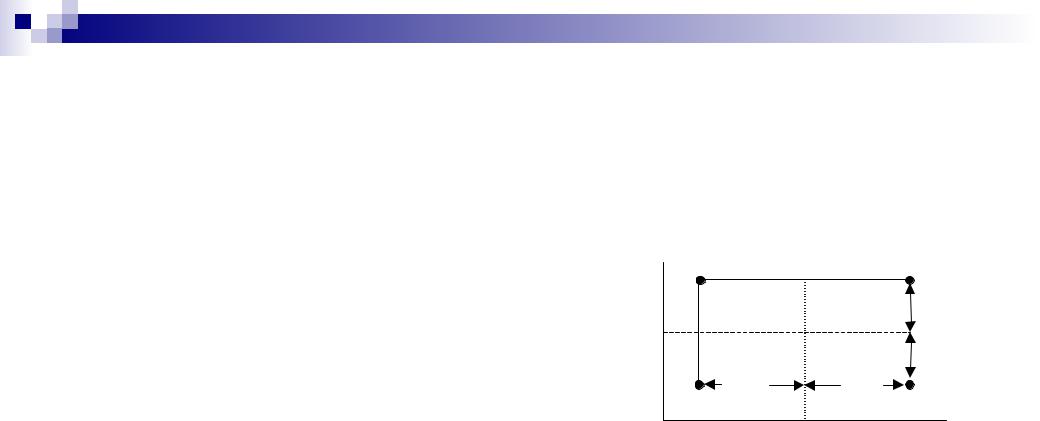
Экспериментальные точки для входных координат зададим в вершинах гиперпрямоугольника.
Интервалы покачивания относительно базовой точки задаются экспериментатором, и они определяют область изучения объекта.
 Построение линейной статической модели объекта
Построение линейной статической модели объекта
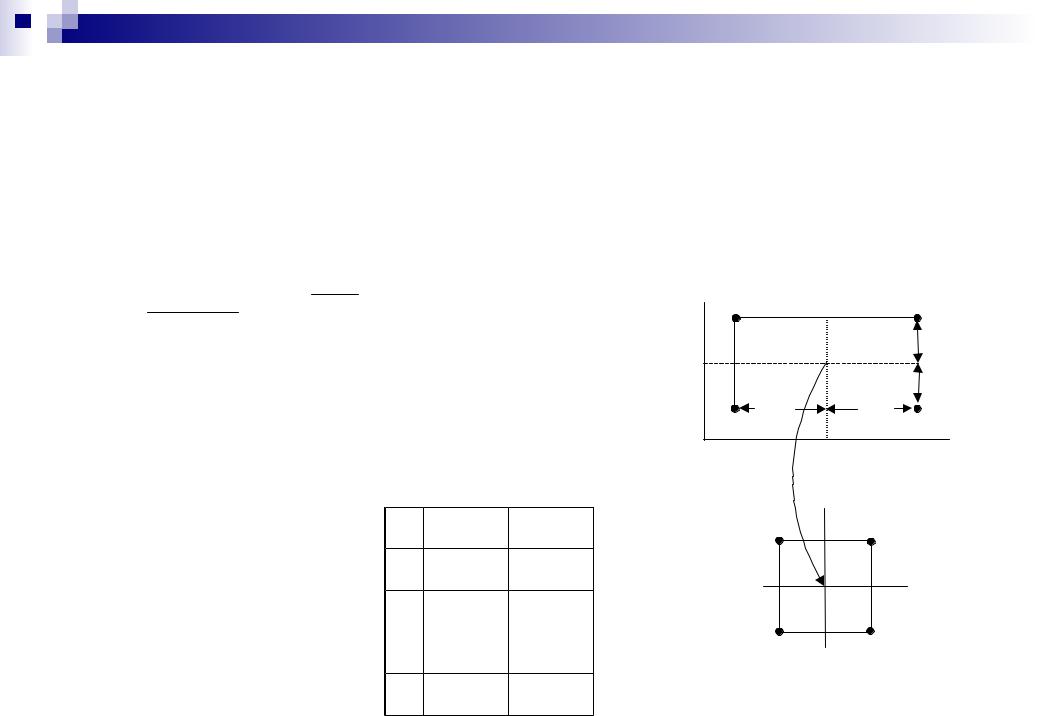
С целью унификации процедур построения планов, исследования их свойств, расчета параметров и исследования качества модели осуществляется переход от размерных входных переменных u1,…,um к безразмерным x1,…,xm.
x j u j u0j , j 1, m |
|
|
|
|
u2 2 |
|
|
|
1 |
|
u j |
|
|
|
|
u0 |
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
u2 |
||
Точки плана в вершинах прямоугольника в новых |
2 |
|
|
|
||||||
|
u1 |
|
u1 |
|||||||
координатах оказываются в вершинах квадрата с |
4 |
|
3 |
u1 |
||||||
единичными координатами. Центр плана переходит в |
|
|
u10 |
|
|
|||||
начало координат. |
|
|
|
|
|
|
|
|
|
|
n xo |
x1 |
x2 |
yi |
|
2 |
1 x2 1 |
|
|
||
1 |
+ |
+ |
+ |
y1 |
|
1 |
|
|
x |
|
В итоге получается план: |
|
|
|
|
|
|
1 |
|
||
2 |
+ |
– |
+ |
yi |
|
|
|
1 |
|
|
|
4 |
|
3 |
|
|
|||||
3 |
+ |
+ |
– |
y3 |
|
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
4 |
+ |
– |
– |
y4 |
|
|
|
|
|
|

 Построение линейной статической модели объекта
Построение линейной статической модели объекта
В новых безразмерных координатах x1,…,xm линейная |
|
|
|
|
m |
|||||||||
модель также сохраняет линейный вид: |
|
|
|
|
|
|
y |
0 j x j |
||||||
|
|
|
|
|
|
|
|
|
|
|
j |
j 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 0 , j j u j , j 1, m |
|
|
|
, |
|
|
|
|
, j 1, m |
|||||
|
|
|
u j |
|||||||||||
|
|
|
|
0 |
0 |
|
|
j |
|
|
|
|
|
|
Параметры βi модели рассчитаем по критерию наименьших квадратов :
2 |
n |
( yi 0 |
m |
2 |
min |
I y |
|
j x ji ) |
|
||
|
i 1 |
|
j 1 |
|
|
Предполагая, что измерения выхода некоррелированные и равноточные получаем систему линейных алгебраических уравнений:
2 |
m |
|
|
|
2 |
(xk , y), k 0, 1, , m |
|
y |
(xk |
, x j ) j y |
|
||||
|
j 0 |
|
|
|
|
|
|
|
(xj , y) |
|
|
(xj , y) |
|
n |
n |
|
|
|
(xk , x j ) xki x ji , |
(xk , y) xki yi |
|||
j |
(xj , xj ) |
|
n |
i 1 |
i 1 |
||
|
|
||||||

Крутое восхождение по поверхности |
||||
|
отклика |
|
||
В планировании эксперимента поверхностью отклика называют уравнение связи |
||||
выхода объекта с его входами. |
|
|
|
|
В 1951 году Бокс и Уилсон предложили использовать последовательный "шаговый" |
||||
метод движения к экстремуму выхода объекта. |
|
|||
u2 |
Коэффициенты αi линейной модели являются |
|||
оценками составляющих градиента: |
||||
|
|
|
0 |
) ; i 1, m |
|
|
a (u |
||
|
|
i |
Ui |
|
|
|
|
|
|
|
Далее движение осуществляется по поверхности |
|||
|
отклика в направлении оценки градиента |
|||
u1 |
1 |
0 |
|
|
u |
u |
k , где k - величина шага. |
||

Полный факторный эксперимент
Полным факторным экспериментом называется эксперимент, в котором реализуются все возможные сочетания уровней факторов. Если число факторов равно m, а число уровней каждого фактора равно p. то имеем полный факторный эксперимент типа pm.
При построении линейной модели объекта используется полный факторный эксперимент типа 2m. Условия эксперимента записываются в таблицы, в которых строки соответствуют различным опытам, а столбцы – значениям факторов. Такие таблицы называются матрицами планирования эксперимента.
|
|
|
|
n |
x1 |
x2 |
x3 |
x4 |
yi |
|||
|
|
21 |
|
1 |
|
|
|
|
|
|
|
y1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
y2 |
|
|
|
|
3 |
|
|
|
|
|
|
|
y3 |
|
|
22 |
|
4 |
|
|
|
|
|
|
|
y4 |
|
|
|
|
5 |
|
|
|
|
|
|
y5 |
|
|
|
|
|
6 |
|
|
|
|
|
|
y6 |
|
|
|
|
|
7 |
|
|
|
|
|
|
y7 |
|
|
23 |
|
|
8 |
|
|
|
|
|
|
|
y8 |
|
|
|
|
9 |
|
|
|
|
|
y9 |
||
|
|
|
|
10 |
|
|
|
|
|
y10 |
||
|
|
|
|
11 |
|
|
|
|
|
y11 |
||
24 |
|
|
12 |
|
|
|
|
y12 |
||||
|
|
13 |
|
|
|
y13 |
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
14 |
|
|
|
|
|
y14 |
||
|
|
|
|
15 |
|
|
|
|
|
y15 |
||
|
|
|
|
16 |
|
|
|
|
|
|
|
y16 |

Полный факторный эксперимент
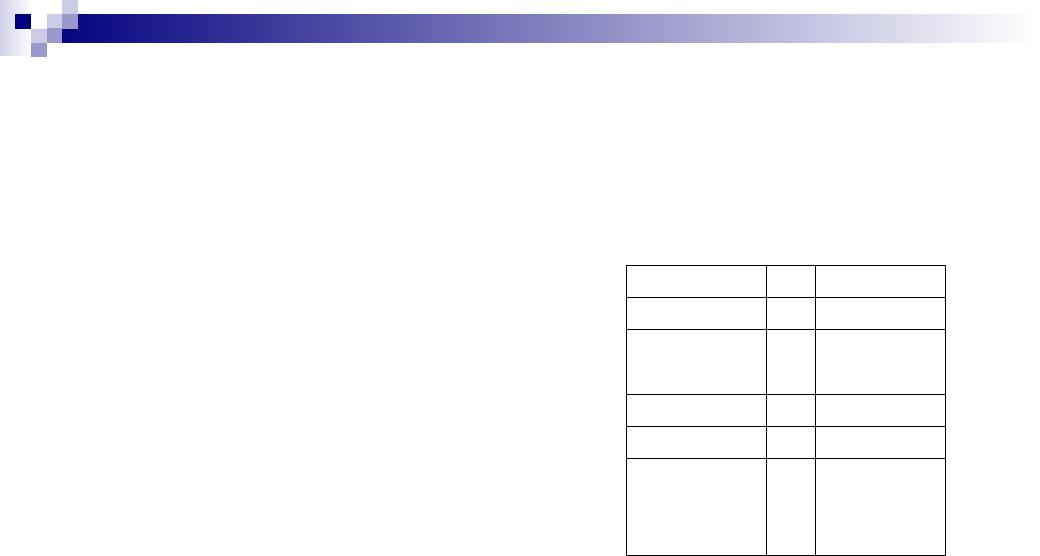
С использованием ортогонального плана первого порядка можно определять не только коэффициенты βi, но и коэффициенты βij перед факторами взаимодействия xixj (i≠j)
Например, при m=2 можно рассчитать и коэффициенты модели:
y 0 1x1 2 x2 12 x1x2 |
n |
x0 |
x1 |
x2 |
x1x2 |
yi |
1 |
+ |
+ + |
+ |
y1 |
||
|
2 |
+ |
– |
+ |
– |
y2 |
|
3 |
+ |
+ |
– |
– |
y3 |
|
4 |
+ |
– |
– |
+ |
y4 |
Дробные реплики
При большом числе входов объекта полный факторный эксперимент 2m содержит большое число экспериментов. Можно этот план разбивать на блоки (дробные реплики) с сохранением ортогональности плана. При этом по меньшему числу точек определяются (также независимо друг от друга) все
коэффициенты линейной модели. |
n |
x1 |
x2 |
x3 |
X4=x1x2 |
|
|
||||||
Чтобы получить дробную реплику, необходимо |
1 |
+ |
+ |
+ |
+ |
|
2 |
– |
+ |
+ |
– |
||
за основу взять полный факторный эксперимент |
||||||
3 |
+ |
– |
+ |
– |
||
(например 23) и в качестве новой переменной |
||||||
взять один из столбцов (например x4), |
4 |
– |
– |
+ |
+ |
|
соответствующий фактору взаимодействия |
5 |
+ |
+ |
– |
– |
|
(например x4=x1x2). Для данного примера |
6 |
– |
+ |
– |
+ |
|
дробная реплика обозначается как 24-1. |
7 |
+ |
– |
– |
+ |
|
|
8 |
– |
– |
– |
– |
Определяющий контраст (или определяющие контрасты, когда их несколько) позволяет установить разрешающую способность дробной реплики. Разрешающая способность будет максимальной, если линейные эффекты будут смешаны с эффектами взаимодействия наибольшего возможного порядка.