

. Выбор электродвигателя
В ПГД МРС применяются асинхронные электродвигатели переменного тока и двигатели постоянного тока.
5.6.1. Асинхронные двигатели
Асинхронные двигатели (АД) имеют ряд достоинств: относительная дешевизна, высокие энергетические показатели, простота обслуживания – обусловивших их широкое распространение. Основной массовой серией АД является серия 4А. Серия включает основное исполнение, ряд модификаций и специализированные исполнения. АД основного исполнения предназначены для нормальных условий работы. К модификации АД серии 4А относятся в частности многоскоростные АД.
Конструктивным решением АД является станина с продольными радиальными ребрами и наружный обдув установленным на валу реверсивным центробежным вентилятором, защищенным кожухом, служащим одновременно для направления воздушного потока. Основные технические данные одно- и двухскоростных АД серии 4А приведены в приложениях 3,4. Габаритные, установочные и присоединительные размеры АД приведены в [7].
5.6.2. Двигатели постоянного тока
В настоящее время основной серией электрических машин постоянного тока является серия 2П. Эти двигатели имеют независимое электромагнитное возбуждение, частота вращения вала регулируется изменением напряжения в якоре в сторону уменьшения от номинального значения и ослаблением магнитного потока возбуждения – в сторону повышения. Они питаются от источника постоянного тока или от тиристорного преобразователя переменного тока. Имеют средний срок службы 12 лет, средний ресурс – 30 000 часов.
В обозначении ДПТ указываются: серия (2П), исполнение по способу защиты и вентиляции (Н – защищенное с самовентиляцией), высота оси вращения вала в мм (132…225), условное обозначение длины сердечника якоря (М – средняя, L - большая).
. Основные технические данные ДПТ серии 2П приведены в приложении 5. Габаритные, установочные и присоединительные размеры АД приведены в [7].
5.6.3. Расчет мощности электродвигателя
Мощность электродвигателя рассчитывается по формуле:
Nэдв = Nэфф / (1.25* η), (21)
где Nэфф – максимальное значение мощности согласно таблице 2; η – коэффициент полезного действия ПГД, определяемый согласно КС или принимаемым равным 0.7 … 0.85.
Если в проектируемом приводе предусматривается только один двигатель, следует учесть мощность, расходуемую цепях подач и вспомогательных движений. Мощность, потребная на подачу, можно принять: для токарных станков 3…4 %, сверлильных - 4…5 %, фрезерных – 15…20 % от мощности привода главного движения.
Затем по рассчитанной мощности Nэдв из приложения 3,4 и [7] выбирается марка электродвигателя и выписывается его техническая характеристика. С целью уменьшения габаритов привода целесообразно частоту вращения двигателя принимать близкой к максимальной частоте вращения шпинделя.
Для проверки правильности принятого решения следует сравнить характеристики выбранного двигателя и двигателя ПГД станка-аналога.
5.7. Построение структурной сетки
Для построения структурной сетки (СС) следует согласно п.3.3.3.1 определить характеристики групп передач, т.е. присвоить каждой группе передач статус основной (I), первой переборной (II), второй переборной (III) и т.д. В соответствии с этим при р групп передач можно получить р! вариантов СС.
СС представляет собой графическое изображение порядка включения передач привода с данной структурой. СС всегда симметрична.
На СС передачи изображаются симметричными лучами, расходящимися на число интервалов, равное характеристике данной группы в соответствии с таблицей 4.
СС строится в следующем порядке.
а) На равных расстояниях друг от друга проводят горизонтальные линии (на одну больше числа передач в приводе);
б) проводят через равные интервалы вертикальные линии в количестве, равном числу ступеней привода; расстояние между ними соответствует lgφ, так как для геометрического ряда lgnz = lg nz-1 + lgφ;
Таблица 4
Параметры структурной сетки
|
Параметр СС |
Группа передач | |||
|
Основная (I) |
Первая переборная (II) |
Вторая переборная (III) |
Третья переборная (IV) | |
|
Число лучей (передач) в группе |
ZI |
ZII |
ZIII |
ZIV |
|
Характеристика группы |
1 |
ZI |
ZI *ZII |
ZI * ZII *ZIII |
в) в центре верхней горизонтальной линии намечают исходную точку (скорость вала двигателя); при нечетном значении z ее лучше выбрать в узле (на пересечении горизонтальной и вертикальной линий), при четном значении z – в середине интервала между вертикальными линиями;
г) из исходной точки симметрично проводят вниз до второй горизонтальной линии ра лучей, расходящихся на число интервалов, равное характеристике этой группы; эти лучи изображают передачи группы ра;
д) из каждой точки на второй горизонтальной линии симметрично проводят по рв лучей, расходящихся на число интервалов, равное характеристике группы рв; эти лучи изображают передачи группы рв.
Подобное построение выполняется для последующих групп привода. Для привода со сложенной структурой вначале строят СС для тихоходной части привода (с большим числом передач), затем пристраиваются лучи, изображающие передачи быстроходной части привода.
СС может строиться и в вертикальном положении.
Как видно, для построения СС необходимо правильно определить характеристики групп передач. Рассмотрим некоторые примеры определения характеристик групп передач.
Примеры. а) ПГД со структурной формулой z = 12 = ра * рb * рc =
= 3 * 2 * 2.
Принимая структурный вариант, при котором ра = I, рb = II, рc =III, получим значения характеристик групп передач: xa = 1, xb = 3, xc = 6:
z = 3 * 2 * 2
[1] [3] [6]
Вариант СС, при котором ра > рb > рc, и xa < x < xc , называют веерообразным. Он обеспечивает наименьшие габариты привода.
Принимая различные структурные варианты, можно получить СС другого вида.
б) ПГД с двухскоростным АД со структурной формулой z = 12 = = 2 * 3 * 2.
В этом случае значения характеристик зависят от величины выбранного знаменателя ряда:
При φ = 1.12 z = 12 = 2 [6] x 3[1] x 2[3]
При φ = 1.26 z = 12 = 2 [3] x 3[1] x 2[6]
При φ = 1.41 z = 12 = 2 [2] x 3[4] x 2[1]
При φ = 2 z = 12 = 2 [1] x 3[2] x 2[6]
При других значениях φ построение ПГД с двухскоростным АД по геометрическому ряду при данной структуре невозможно.
СС для ПГД с двухскоростным АД показаны на рис 7.
в) СС для ПГД со сложенной структурой приведены на рис. 8.
СС показывает соотношения между передаточными отношениями, но не их величину. Она используется для построения графика частот вращения.
Во избежание больших габаритов передач в коробках скоростей установлены предельные значения передаточных отношений:
1/4 ≤ U ≤ 2 (22)


Рис.7. Структурные сетки для ПГД с двухскоростным АД при z = 12 при различных значениях знаменателя ряда
Это означает, что наибольший диапазон регулирования в пределах группы передач не может превышать
R пред = U max/Umin = 8 (23)
Поскольку R пред = φ X max , где x max – наибольшее число интервалов, на которое расходятся лучи в данной СС, для различных значений φ величины x max будут различными. Эти значения выбираются из таблицы 5.
Р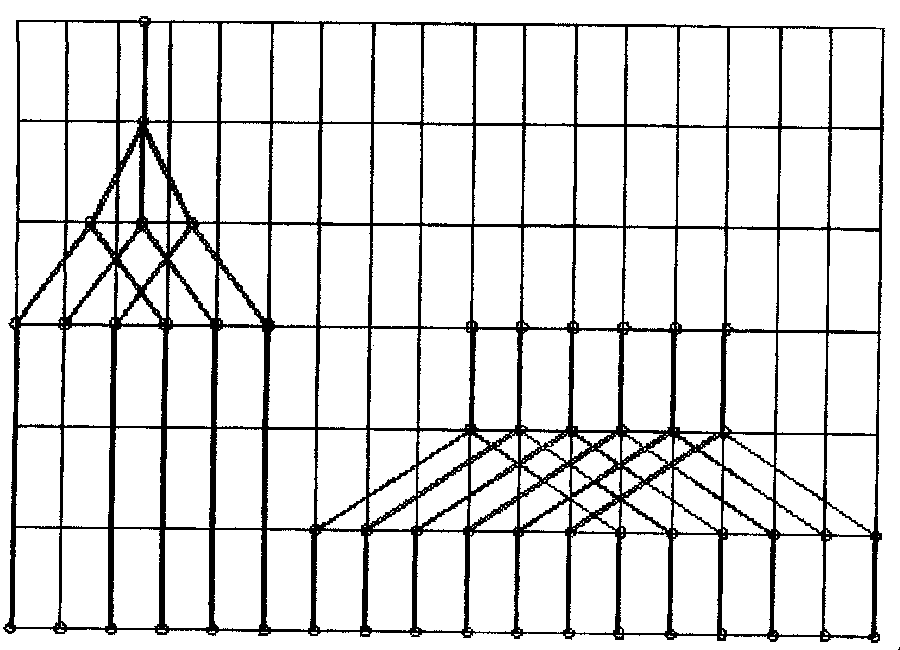 ис.
8. Структурная сетка для
ис.
8. Структурная сетка для
ПГД со сложенной структурой
Из всех СС, построенных при данных значениях z и φ, для дальнейшего рассмотрения приемлемы лишь те, в которых наибольшее число интервалов, между концами лучей в любой группе передач не превосходит значений, указанных в таблице 5.
Таблица 5
Максимальное допустимое число интервалов, перекрываемых лучами на структурной сетке x max в зависимости от знаменателя ряда φ
|
Величина φ |
1.06 |
1.12 |
1.26 |
1.41 |
1.58 |
1.78 |
2.0 |
|
Величина x max |
36 |
18 |
9 |
6 |
4 |
3 |
3 |
Если ни одна из построенных СС не отвечает этому условию, следует изменить значение φ или перейти к другому структурному варианту.