

Эл. машины. Разделы 1, 2, 3
.pdfПараллельная работа генераторов смешанного возбуждения, схема которой показана на рис. 36, а, характеризуется такими же, как описано выше, способами распределения нагрузок.
Рис. 36. Параллельная работа компаундных ГПТ
Для обеспечения устойчивой параллельной работы генераторов смешанного возбуждения последовательные обмотки В1 и В2 с помощью уравнительной шины соединяются параллельно (рис. 36, б). Поэтому общий ток нагрузки от отрицательной шины разветвляется на токи IВ1 и IВ1, которые обратно пропорциональны величинам сопротивлений обмоток В1 и В2. Если э.д.с. какого-либо генератора неожиданно возрастет и он начнет увеличивать отдаваемый им в сеть нагрузочный ток, то часть этого тока пойдет по последовательной обмотке другого генератора. Магнитный поток этого генератора возрастет, его э.д.с. также увеличится, а следовательно, увеличится и его нагрузочный ток. Таким образом, нагрузка автоматически распределится между обоими генераторами пропорционально их мощности. Из этого видно, что параллельная работа генераторов смешанного возбуждения устойчива в случае применения уравнительного провода.
При подключении генератора к шинам он толчком возьмет на себя часть нагрузки. Это вызывается тем, что часть нагрузочного тока работающего генератора пойдет по последовательной обмотке второго генератора в момент его подключения. Следовательно, э. д. с. и нагрузочный ток подключаемого генератора мгновенно возрастут, что вызовет появление механического толчка на валу первичного двигателя.
Электромашинные усилители
ГПТ независимого возбуждения можно рассматривать как усилитель, в котором сравнительно небольшая мощность цепи возбуждения управляет гораздо большей выходной мощностью. Однако коэффициент усиления такого устройства невысок.
41

Электромашинный усилитель (ЭМУ) относится к числу машин,
позволяющих осуществлять непрерывное автоматическое управление в электрических приводах. ЭМУ широко применяются в схемах судовых электроприводов, в том числе в схемах электродвижения судов. ЭМУ могут быть с поперечным (амплидин) и продольным (рототрол) полем. Как и всякий усилитель, ЭМУ характеризуется коэффициентом усиления
k у P2 P1 ,
где Р1 – входная мощность, Вт; Р2 – выходная мощность, Вт. Быстродействие ЭМУ обуславливается постоянной времени
T L R ,
где L – индуктивность цепи, Гн; R – активное сопротивление цепи, Ом. Усиление в ЭМУ может быть одноступенчатым и многоступенчатым (в
этом случае быстродействие определяется постоянной времени выходной ступени).
ЭМУ поперечного поля имеет двухполюсную магнитную систему с нормальным якорем МПТ, но с двумя парами щеток, из которых одна замкнута накоротко. Принципиальная схема такой машины дана на рис. 37. Обмотка возбуждения машины расположена на полюсах статора симметрично продольной оси х-х. Эту обмотку называют обмоткой управления. Таких обмоток может быть до четырех.
Ток управления I1 создает магнитный поток, наводящий э.д.с. в короткозамкнутой щетками а-а обмотке. Эта э.д.с. незначительна, в то время как вызванный ею ток Iа достигает значительной величины изза небольшого сопротивления в короткозамкнутой цепи. Ток Iа создает сильный поперечный магнитный поток, замыкающийся по оси у-у. Обмотка управления и обмотка якоря со щетками а-а образуют первую ступень усиления.
Созданный током Iа поток, пронизывая обмотку вращающегося якоря, создает на
щетках b-b напряжение на выходе U2 и ток в цепи I2. Следовательно, короткозамкнутая обмотка со щетками а-а и обмотка якоря со щетками b-b образуют вторую ступень усиления.
В связи с тем, что ток I2 создает магнитный поток, под влиянием которого наводится э.д. с. продольно оси х-х, для компенсации этого магнитного потока устанавливают компенсационную обмотку К, причем степень компенсации можно регулировать сопротивлением Rк. У таких усилителей kу=10000÷100000
и Т=0,1÷0,25 с.
ЭМУ продольного поля (рис. 38) применяются в качестве возбудителей мощных генераторов постоянного и переменного токов.
42

Такая машина представляет собой четырехполюсный генератор параллельного возбуждения, в котором исключены обмотка управления с током I1 и возбудительная обмотка с током Iа. Сопротивление шунтовой обмотки ШОВ должно быть больше критического значения во избежание самовозбуждения машины при отсутствии сигнала в управляющей обмотке (тока I1). Щетки одной полярности а-а и b-b соединены
Рис. 38. ЭМУ с продольным полем |
между собой перемычками. Обмотки К – |
|
компенсационные. |
||
|
При подаче в двухполюсную управляющую обмотку тока I1 и появлении вызванного им потока нарушается магнитная симметрия в машине, и в цепи щеток а-а появляется уравнительный ток Iа, который, обтекая возбудительные обмотки, вызывает самовозбуждение ЭМУ. Одновременно и магнитный поток обмотки ШОВ возбуждает машину.
Обмотка управления с током I1 и цепь якоря а-а образуют первую ступень усиления; та же цепь и обмотка с током Iа образуют вторую ступень. У двухступенчатого ЭМУ kу=20000÷40000, у трехступенчатого kу=100000÷300000.
XI. Двигатели постоянного тока
Одна и та же МПТ без всяких конструктивных изменений может работать как в режиме генератора, так и в режиме двигателя (это свойство называется
обратимостью электрических машин).
И в том, и в другом режимах взаимодействие тока в якорной обмотке с магнитным полем приводит к возникновению механической силы (силы электромагнитного взаимодействия), действующей на проводники якорной обмотки и создающей в итоге механический момент. В генераторном режиме работы МПТ этот момент направлен навстречу вращающему моменту первичного двигателя (является для него тормозящим, т.е. противодействующим).
В двигательном режиме работы якорь МПТ получает питание от внешнего источника (сети), а развиваемый силами электромагнитного момент будет стремиться привести якорь во вращение в направлении своего действия (т.е. момент в данном случае является вращающим). При одной и той же
43

полярности шин направление тока якоря в генераторном и двигательном режимах будет противоположным (см. рис. 39).
При вращения якоря ДПТ в магнитном поле его проводники пересекают магнитные силовые линии и в них наводится э.д.с., величина которой определяется по выражению (3): E cE nФ . Эта э.д.с. направлена навстречу току якоря и называется обратной или противодействующей (противо-э.д.с.).
Для преодоления сопротивления, оказываемого противо-э.д.с. прохождению тока по якорной обмотке, напряжение сети должно быть больше противо-э.д.с.
Приложенное к якорю напряжение сети компенсирует противо-э.д.с. и падение напряжения в цепи якоря:
U E Ia Ra , (9)
где Е - противо-э.д.с.,
Ra – сопротивление цепи якоря.
Из (9) следуют выражения для тока и скорости вращения:
I U E U cE nФ , (10) Ra Ra
n U Ia Ra . (11)
Обычно напряжение сети постоянно, и ток якоря зависит в основном от величины противо-э.д.с.
11.1. Электромагнитный момент МПТ
При протекании тока в якоре на каждый проводник обмотки якоря действует электромагнитная сила (рис. 40), среднее значение которой с учетом выражения (2) равно
Fср ВсрlI пр .
Вращающий электромагнитный момент этого проводника равен
М пр Fср D2 ,
где D – диаметр якоря.
Рис. 40. К понятию |
Рис. 41. Энергетическая |
момента ДПТ |
диаграмма ДПТ |
|
44 |

Общее число проводников якоря N создают вращающий момент ДПТ:
М М пр N ВсрlI пр D2 N .
Если выразить ток проводника через ток нагрузки и число параллельных ветвей якорной обмотки Iпр=I/2a и учесть, что D=2pτ/π, а Ф=Всрlτ, получим
M cM IФ , (12)
где cM pN – постоянная момента МПТ.
2 a
На рис. 41 приведена энергетическая диаграмма ДПТ, на которой обозначены: Р1 – мощность, потребляемая двигателем из сети; Ра – мощность, подводимая к якорю; Рв – мощность, затрачиваемая на возбуждение; PM Ia2 Ra –
мощность, покрывающая потери в якоре. Мощность Ра за вычетом потерь РМ преобразовывается в электромагнитную мощность Рэм, которая, в свою очередь, преобразовывается в механическую мощность. Полезная механическая мощность на валу ДПТ Р2=Рэм–Р0, при этом величина Р0 называется потерями холостого хода и состоит из механических потерь Рмех и потерь в стали якоря
Рс: Р0= Рмех+ Рс.
Электромагнитный момент ДПТ состоит из двух составляющих: полезного момента М2=Р2/ω (где ω=2πn/60 – угловая скорость машины) и момента холостого хода М0=Р0/ω, т.е.
М=М2+М0.
(в динамике, т.е. при разгоне или торможении ДПТ, к двум слагаемым правой части данного равенства прибавляется динамический момент, определяемый
инертностью вращающихся масс M j J ddt ).
Приводимый ДПТ механизм создает на валу момент сопротивления Мс, который уравновешен противоположным по знаку полезным вращающим моментом. Пренебрегая малым по величине М0, можно считать, что
М=М2, Мс=М.
В установившемся режиме работы, таким образом, развиваемый двигателем момент автоматически устанавливается равным моменту сопротивления на валу. Вращающий момент зависит от тока якоря (10), регулятором которого является противо-э.д.с., поэтому еѐ можно считать и регулятором момента ДПТ, например, предположим, что момент сопротивления на валу двигателя вырос, ↑Мс→↓n→↓E=cEnФ→↑I=(U– E)/Ra→↑M=cMФI, этот процесс продолжается до восстановления равновесия моментов Мс=М.
11.2. Пуск ДПТ в ход
В начальный момент пуска двигателя n=0 и Е=0. Поэтому пусковой ток Ia=U/Ra будет в 10÷25 раз превышать номинальный ток якоря (сопротивление Ra невелико), достигая опасных значений. Поэтому прямой пуск ДПТ путем непосредственного включения их в сеть допустим только для машин малой мощности (по Правилам Регистра РФ – до 1,3 кВт).
45

Для снижения пускового тока на время пуска последовательно с обмоткой якоря включается добавочное сопротивление – пусковой реостат. Сопротивление его рассчитывается таким образом, чтобы кратность пускового тока составляла Iп=(1,3÷2,5)Iн.
Пусковой реостат делается многоступенчатым. В начале пуска вводится всѐ сопротивление реостата, чтобы ограничить пусковой ток при отсутствии противо-э.д.с. По мере разгона двигателя противо-э.д.с. растет, ограничивая величину тока, а сопротивление реостата уменьшают, увеличивая тем самым подводимое к якорю напряжение. Количество ступеней реостата определяется условиями плавности пуска двигателя.
На рис. 42, а представлена схема включения пускового реостата для двигателя параллельного возбуждения. Реостат имеет пять контактов: четыре рабочих (1-4) и один холостой (нулевой) и три зажима Л, Ш, Я. Скользящий контакт реостата К перемещается по неподвижным контактам, причем неподвижные контакты размещаются на таком расстоянии друг от друга, чтобы не происходило разрыва цепи при пуске.
Рис. 42. Схема пуска шунтового ДПТ
При включении рубильника Р и при переводе рукоятки реостата с нулевого положения на контакт 1 двигатель возбуждается и по цепи якоря пойдет ток. Пусковой ток при этом равен
Iп |
|
U |
, |
|
|
|
|
|
|
|
|
|
|
||
Ra |
Rп |
|
|
|
|
||
|
|
|
|
|
|
||
где ∑Rп – сумма сопротивлений всех секций пускового реостата. |
|
||||||
При снижении тока якоря до величины порядка |
I |
|
(1,3 2,5)Iн |
(см. рис. |
|||
п |
|||||||
42, б) рукоятка реостата должна быть переведена в положение 2, тем самым первая секция пускового сопротивления выводится из цепи якоря. Возникает новый бросок тока и новое увеличение скорости вращения с последующим снижением якорного тока; аналогично выводятся и другие секции пускового
46
реостата.
Показанное на рис. 42, а пунктиром сопротивление R является разрядным и защищает ОВ от перенапряжений, которые могут возникнуть на ОВ при отключении питания и размыкании цепи ОВ. Величина R в 4-5 раз больше сопротивления ОВ.
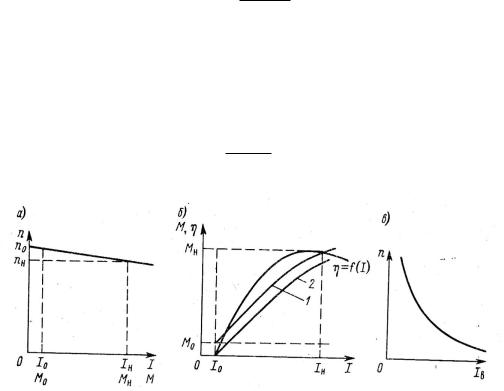
11.3. Характеристики ДПТ
Рабочие характеристики – это зависимости n, M, η=f(I) при U=Uн=const и
Iв=const.
Зависимость n=f(I) называется внешней, или скоростной характеристикой.
Зависимость M=f(I) называется характеристикой вращающего момента.
Механической характеристикой двигателя называют зависимость n=f(М).
Зависимость n=f(Iв) при I=const и U=const называется регулировочной характеристикой.
Шунтовой ДПТ
Схема ДПТ параллельного возбуждения дана на рис. 42.
Внешняя характеристика n=f(I) при Iв=const и U=const строится по выражению
n U IRa cEФ
и показана на рис. 43, а. С увеличением нагрузки на двигатель ↑I→↑IRa→↓n, однако некоторое уменьшение Ф под действием размагничивающей реакции якоря делает снижение n не столь значительным. Жесткость внешней характеристики оценивается величиной номинального изменения скорости вращения (см. рис. 43, а)
nн n0 nн 100% , nн
которая у рассматриваемых ДПТ обычно составляет (2÷8)%.
Рис. 43. Характеристики ДПТ параллельного возбуждения
Механическая характеристика n=f(M) имеет практически такой же вид
(рис. 43, а), что и внешняя. Так как U=const→Iв=const→Ф≈const→M~I. Такая
47
характеристка называется жесткой, т.к. скорость двигателя при изменении нагрузки от х.х. до номинальной меняется незначительно.
Характеристика вращающего момента M=f(I) при U=const и Iв=const
показана кривой 1 на рис. 43, б. Характеристика имеет небольшой изгиб под действием размагничивающей реакции якоря. Кривая полезного момента 2 на рис. 43, б располагается ниже кривой 1 на величину момента холостого хода, практически не зависящего от нагрузки. Там же показана зависимость для к.п.д. η=f(I) при U=const и Iв=const, из которой видно, что для высокой эффективности работы двигателя надо стремиться к его номинальной загрузке. Как правило, в двигателях малой мощности к.п.д. составляет (75÷85)%, а в двигателях средней и большой мощности – (85÷94)%.
Регулировочная характеристика n=f(Iв) при I=const и U=const
представлена на рис. 43, в. При ненасыщенной магнитной системе регулировочная характеристика является гиперболической. По мере насыщения стали при больших токах Iв характеристика приближается к линейной.
При малых Iв скорость вращения резко возрастает. При обрыве цепи возбуждения и отсутствии нагрузочного момента скорость вращения двигателя возрастет до недопустимых пределов («разнос двигателя»), так как магнитный поток двигателя в этом случае мал (будет равен потоку остаточного магнетизма).
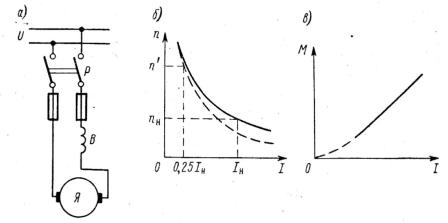
Сериесный ДПТ
Схема и характеристики ДПТ последовательного возбуждения показаны на рис. 44.
Рис. 44. Схема и характеристики ДПТ последовательного возбуждения
У сериесного ДПТ ток нагрузки является и током возбуждения, поэтому для ненасыщенной машины (Ф~Iв~I) можно записать
n |
U IRa |
|
U |
. (13) |
|
|
|
||||
|
|
|
|||
|
cE I |
|
cE I |
|
Внешняя характеристика n=f(I) при Iв=const и U=const имеет вид гиперболы, однако по мере увеличения тока и насыщения машины характеристика отклоняется от чисто гиперболической (сплошная кривая на рис. 44, б). ДПТ последовательного возбуждения нельзя пускать без нагрузки
48
на валу или с малой нагрузкой, т.к. в этом случае обороты резко увеличиваются и двигатель идет «в разнос». Номинальное изменение скорости вращения оценивается по выражению
nн n nн 100% . nн
Механическая характеристика n=f(M) при U=const может быть построена, исходя из следующих соображений. При ненасыщенной магнитной
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M . Подставив это значение в формулу |
|||||||||||
системе M cM ФI cM I |
|
, поэтому I cM |
|
|
|||||||||||||
(13), получим искомое выражение механической характеристики |
|
|
|
|
|||||||||||||
|
|
|
|
n |
|
U |
|
|
|
. (14) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
M |
|
|
|
|
|
|||||
|
|
|
|
|
cM |
|
|
|
|
|
|
|
|||||
Из сопоставления выражений (13) и (14) можно заключить, что |
|||||||||||||||||
механическая характеристика будет иметь тот же вид, что и внешняя. |
|
|
|
||||||||||||||
Характеристика |
вращающего |
|
|
момента M=f(I) |
при |
U=const при |
|||||||||||
ненасыщенной |
магнитной системе |
|
имеет параболический |
вид |
|
2 |
, |
||||||||||
|
|
||||||||||||||||
|
M cM I |
|
|||||||||||||||
спрямляясь |
по |
мере |
|
насыщения и |
|
|
приближаясь к |
уравнению |
прямой |
||||||||
M cM ФI kI |
(рис. 44, |
в). Так как у сериесного двигателя Ф~I, то пусковой |
|||||||||||||||
момент у него значительно больше, чем у шунтовых ДПТ.
Регулировочная характеристика n=f(Iв) при I=const и U=const имеет такой же вид, как и внешняя (т.к. Iв=I, то и n=f(Iв)=f(I)).
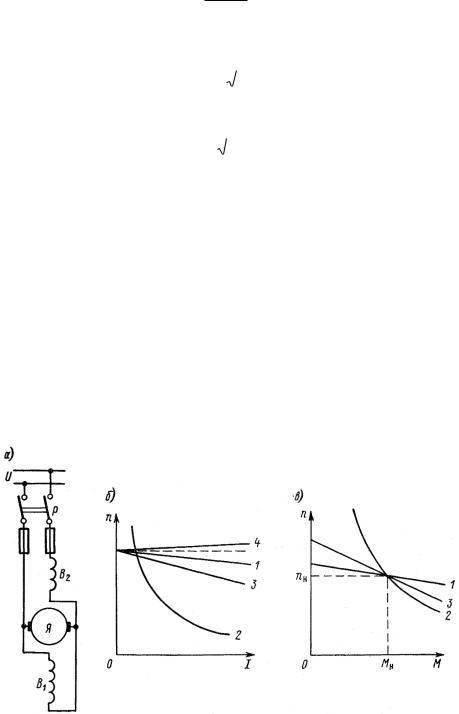
Компаундный ДПТ
Схема и характеристики ДПТ смешанного возбуждения показаны на рис.
45.
Рис. 45. Схема и характеристики ДПТ смешанного возбуждения
Выражение для скорости вращения компаундного ДПТ имеет вид:
n |
|
U IRa |
, (15) |
c |
(Ф Ф ) |
||
|
E |
ш с |
|
где Фш, Фс – потоки шунтовой В1 и сериесной В2 обмоток возбуждения.
В формуле (15) знак «+» соответствует согласному, а знак «–» –
49

встречному включению обмоток возбуждения.
Согласное включение слабой последовательной обмотки часто применяются для компенсации размагничивающего действия реакции якоря. Такая обмотка придает внешней характеристике падающий вид и называется
стабилизирующей обмоткой.
При встречном включении обмоток результирующий поток уменьшается с увеличением нагрузки, что вызывает увеличение скорости вращения двигателя (кривая 4 на рис. 45, б); двигатели с таким включением обмоток почти не применяются.
Внешние характеристики n=f(I) при U=const показаны на рис. 45, б (кривая 1 – для шунтового ДПТ, кривая 2 – для сериесного ДПТ, кривая 3 – для компаундного ДПТ при согласном включении ОВ, кривая 4 – для компаундного ДПТ при встречном включении ОВ).
Механические характеристики n=f(M) при U=const (кривая 3 на рис. 45, в) компаундных ДПТ располагаются в зоне между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 2) возбуждения. Приближение к той или иной характеристике зависит от соотношения величин магнитных потоков Фш и Фс. Наличие шунтовой ОВ устраняет опасность «разноса» двигателя.
11.4. Регулирование скорости вращения ДПТ
Из формулы (11) следуют, что регулировать скорость вращения ДПТ можно:
1)Изменением сопротивления цепи якоря;
2)Изменением магнитного потока;
3)Изменением питающего напряжения.
Далее будем считать, что процесс регулирования производится при неизменном моменте сопротивления Мс на валу, что обуславливает одинаковость вращающего момента М до и после окончания процесса регулирования: М=сМФI=const.
Изменение сопротивления цепи якоря
При введении в якорную цепь сопротивлений R1+R2 (см. рис. 46, а)
формула (11) примет вид:
n U I Ra (R1 R2 ) . cEФ
Т.к. U=const→Iв=U/Rв=const→Ф=const, поэтому из условия М=Мс=const
следует, что ток якоря также неизменен (при Ф=const М пропорционален I). Механические характеристики шунтового ДПТ при различных
сопротивлениях в цепи якоря показаны на рис. 46, б. При R1+R2=0 характеристика называется естественной, при введении сопротивлений получаются искусственные характеристики.
Такой способ – это регулирование скорости вниз от номинальной, сопровождаемое значительными потерями энергии I2(R1+R2) в регулировочном
50