

Министерство образования Республики Белорусь Государственное учреждение высшего профессионального образования
Белорусско – Российский университет
Кафедра «Электропривод и автоматизация промышленных установок»
Системы управления электроприводами
Методические указания к лабораторной работе № 5
«Исследование системы ТП-ДПТ с совместным управлением группами вентилей».
Могилев 2003
2
УДК 621.3
Составление: Селиванов В.А. Голушко А.В.
Методические указания для выполнения лабораторной работы №5 «Исследование системы ТП-ДПТ с совместным управлением группами вентилей» по курсу «Системы управления электроприводами». Могилев: Белорусско-Российский университет, 2003. – 19с.
3
Исследование системы ТПДПТ с совместным управлением группами вентилей
Цель работы: изучение статических и динамических харак-
теристик системы ТП-ДПТ с совместным управлением групп вен-
тилей, выполненного на базе тиристорного преобразователя ЭТ-6.
Сведения о лабораторной установке.
Лабораторный стенд, схема электрическая принципиальная которого приведена на рисунке 1ПА, предназначен для исследо-
вания статических и динамических характеристик системы ТП-
ДПТ при различных настройках регулятора скорости и тока.
Функциональная схема регуляторов приведена на рисунок 2ПА.
Скорость исследуемого двигателя М1 регулируется тиристорным преобразователем ЭТ-6 с совместным управлением группами вен-
тилей. Дроссели L1 и L2 служат для ограничения уравнительно-
го тока. Нагрузка на валу исследуемого двигателя создается генератором М2. Величина нагрузки плавно регулируется авто-
трансформатором TV1 и ступенчато контакторами КМ1КМ3. Для включения лабораторного стенда необходимо:
1.Отключить SA2.
2.Резистор RP1 повернуть влево.
3.Включить автоматический выключатель QF1.
4.Замкнуть SA2 и резистором RP1 установить требуемую скорость исследуемого двигателя.
Краткое описание электропривода постоянного тока типа
ЭТ-6.
Электропривод постоянного тока серии ЭТ-6 (в дальнейшем именуемый электропривод) предназначен для регулирования и стабилизации частоты вращения электродвигателя постоянного тока в диапазоне 1:10000.
Электроприводы |
4 |
предназначены для работы в |
закрытых отапливаемых помещениях при следующих условиях:
•Высота над уровнем моря не более 1000 м;
•Температура окружающего воздуха (внутри шкафа) от +5
до +45 °С;
• Относительная влажность окружающего воздуха 80% при
температуре 30 °С.
Окружающая среда невзрывоопасная, не содержащая токо-
проводящей пыли, агрессивных газов и паров в концентраци-
ях, разрушающих металлы и изоляцию. Содержание масел, пыли
– в пределах санитарных норм.
Основные технические данные и характеристики.
Основные технические параметры электропривода приведены
в таблице 1.
Таблица 1 – Основные технические параметры электроприво-
да. |
|
|
|
Наименование параметра |
Требования технических |
||
условий |
|||
|
+10 |
|
|
Напряжение сети, В |
380 |
|
% |
−15 |
|||
Частота сети, Гц |
50+-1 |
||
Мощность электродвигателя, кВт |
0,6 – 11,3 |
||
Максимальный диапазон регулирова- |
10000 |
||
ния частоты вращения электродви- |
|||
гателя |
|
|
|
Электропривод обеспечивает работу во всех 4-х квадрантах
механической характеристики при изменении управляющего на-
пряжения в пределах от –10 до +10 В.
Устройство и принцип работы.
Электропривод серии ЭТ-6 представляет собой электроме-
ханическое устройство, служащие для регулирования и стабили-
зации частоты вращения |
5 |
|
электродвигателя постоянного |
||
тока в диапазоне 1:10000. |
|
|
|
|
|
|
|
|
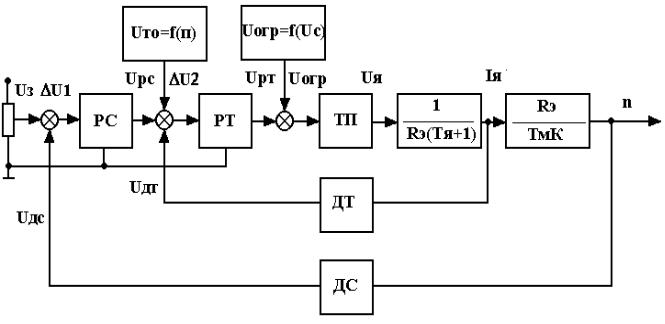
Рисунок 1 - Структурная схема привода Структурная схема привода представлена на рисунке 1,
где:
РС – регулятор скорости;
РТ – регулятор тока;
Uто=f(n) – узел зависимости токоограничения;
ТП – тиристорный преобразователь;
ДТ – датчик тока;
ДС – датчик скорости;
Rэ – эквивалентное сопротивление якорной цепи;
Тя – электромагнитная постоянная времени; Tм – электромеханическая постоянная времени;
К – конструктивный коэффициент; Uз – задающее напряжение;
Uогр=f(Uc) – узел ограничения минимального угла управле-
ния;
6
Uдс – напряжение датчика скорости;
∆U1 – разность (Uз-Uдс);
Uрс – напряжение на выходе регулятора скорости; Uто – напряжение узла токоограничения;
Uдт – напряжение на выходе датчика тока;
∆U2 – разность (Uрс-Uдс);
Uрт – напряжение на выходе регулятора тока;
Iя – ток якоря двигателя;
n – частота вращения электродвигателя.
Принцип работы электропривода.
Электропривод состоит из двух замкнутых контуров подчи-
ненного регулирования: контура тока и контура скорости.
Работа электропривода осуществляется следующим образом:
при наличии рассогласования (∆U1) на входе регулятора скоро-
сти (РС), на его выходе формируется сигнал, пропорциональный этому рассогласованию, который, сравниваясь с текущим значе-
нием тока якоря, поступает на вход регулятора тока (РТ). Ре-
гулятор тока усиливает эту разность и подает управляющее на-
пряжение на схему формирования управляющих импульсов (СИФУ),
функция которой заключается в формировании и распределении импульсов управления силовыми тиристорами. По мере уменьше-
ния рассогласования (под действием отрицательной обратной связи по частоте вращения) происходит стабилизация частоты вращения двигателя на уровне, пропорциональном напряжению задания (Uз). Коэффициент усиления системы регулирования обеспечивает необходимый диапазон регулирования и достаточ-
ную точность поддержания частоты вращения при различных воз-
мущающих воздействиях.
Ограничения тока якоря двигателя осуществляется путем ограничения напряжения выхода регулятора скорости.
Предусмотрено зависимое |
7 |
ограничение тока в функции |
|
частоты вращения. |
|
Программа работы.
1.Ознакомиться с электрооборудованием лабораторной ус-
тоновки, записать паспортные данные электродвигателей,
изучить паспорт на ЭТ-6.
2.По паспортным данным рассчитать настройки регулято-
ров тока и скорости. Регулятор тока настраивать на ТО, а
регулятор скорости на ТО и СО. Используя рисунок 2ПА при-
ложения А рассчитать требуемые величины регуляторов и кон-
денсатором.
3.Используя данные п.2 настроить регуляторы тока и скорости на лабораторном стенде.
4.Снять статическую характеристику ω=ƒ(Ι) при на-
стройке регулятора скорости на ТО и СО.
5.Снять динамические характеристики ω=ƒ(t) и I=ƒ(t)
при набросе и сбросе номинального момента и при скачкооб-
разном сигнале задания скорости. Характеристики снять для случаев настройки регулятора скорости на ТО и СО.
Отчет по лабораторной работе должен содержать:
1.Схему электрическую принципиальную лабораторной ус-
тановки;
2.Расчет регуляторов тока и скорости;
3.Расчет статических характеристик;
4.Экспериментально снятые статические и динамические характеристики;
5.Вывод о работе системы.

Общие |
8 |
о |
системах |
с |
теоретические сведения |
подчиненным регулированием координат.
В современном электроприводе преобразователь обычно ра-
ботает в замкнутой системе автоматического регулирования.
Одной из разновидностей замкнутых систем автоматического регулирования является система с подчиненным регулированием параметров. Основным принципом системы подчиненного регули-
рования является компенсация больших постоянных времени. При реализации принципа починенного регулирования объект регули-
рования разбивают на n частей, каждая из которых имеет свой контур регулирования с регулятором. Число контуров и регуля-
торов равно числу регулируемых параметров n. В такой системе главным является тот параметр регулирования, который опреде-
ляет цель автоматического регулирования. Остальные параметры
– вспомогательные, они подчинены основному параметру, кроме того вспомогательные параметры находятся в подчинении один с другим. Любой к – ый контур является подчиненным к+1 – ому контуру.
Стандартные настройки простейших контуров
Настройка на «оптимум по модулю»
В ряде практических случаев реальные контуры регулирова-
ния могут быть сведены к простейшим контурам второго или третьего порядка, настройка которых осуществляется путем вы-
бора по определенным правилам параметров регулятора. Сущест-
вует способ настройки, называемый настройкой на "оптимум по модулю" (МО).
Рассмотрим для начала элементарный контур, показанный на рисунке 2. В данном контуре объект управления содержит инер-
ционное звено с постоянной времени Tµ и интегрирующее звено
kок
p
9
|
|
kтп |
kок |
|
|
|
|
|
|
||||
Wор(p)= |
Tµp+1 |
p . |
|
|
|
|
|
|
|||||
G(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Yoc(p) |
|
Wрег(p) |
|
|
|
kтп |
|
kок |
|
kос |
|||||
|
|
|
|
|
|
|
p |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Tµp+1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Рисунок 2 – Разомкнутый контур регулирования Здесь объект компенсации представляет собой интегрирую-
щее звено с коэффициентом усиления kок: Woк(p)=kpок.
Осуществим коррекцию контура за счет применения пропор-
ционального регулятора Wpег(p)=kpег.
В этом случае передаточная функция разомкнутого контура
будет:
W(p)=W (p) W (p)=k k kтп kок.
рег ор рег осTµp+1 p
Выбирая передаточный коэффициент регулятора по формуле
1
kрег=2Tµkокkтпkос,
получим передаточную функцию разомкнутого контура при настройке на «оптимум по модулю»:
1 W(p)мо=2Tµp(Tµp+1).
Передаточная функция замкнутого контура получается в ви-
де:
Φ(p)мо= 1/kос . 2Tµ2p2+2Tµp+1
Таким образом, выбор kрег в соответствии с формулой
1
kрег=2Tµkокkтпkос приводит к тому, что рассматриваемый контур описывается передаточной функцией колебательного звена с ко-
10
2
эффициентом демпфирования ξ= 2 =0,707.
Логарифмические частотные характеристики (ЛЧХ), соответ-
1
ствующие передаточной функции W(p)мо=2Tµp(Tµp+1), изображены
сплошными линиями на рисунке 3. Цифрой «—1» обозначен наклон
—20 дБ/дек, цифрой «—2» — наклон —40 дБ/дек.
Рисунок 3 – ЛЧХ контура, настроенного на модульный опти-
мум.
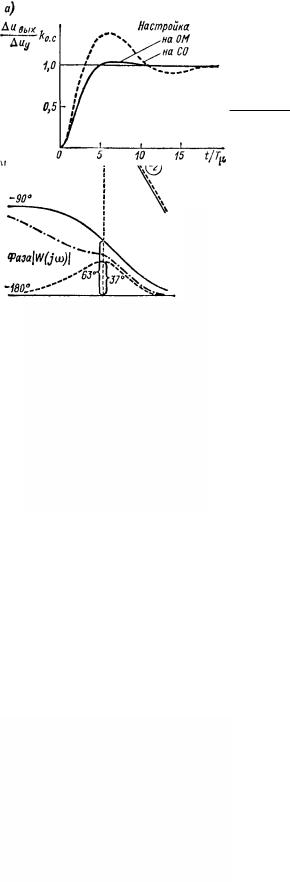
При ступенчатом управляющем воздействии выходная величи-
на в первый раз достигает установившегося значения через время 4,7Tµ, перерегулирование составляет σ%=4,3% (рисунок
4).
Рисунок 4– Переходные характеристики контура при различ-
ной настройке Важной особенностью такой настройки является то, что