

Білет№1
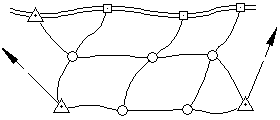
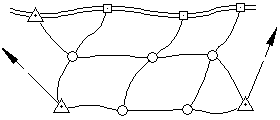
1. .Приблизні схеми побудови полігонометричних мереж згущення 4 класу, 1 та 2 розрядів
Мал. 9. Система ходів полігонометрії з кількома вузловими точками
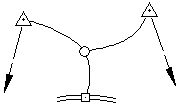
Мал. 10. Система ходів полігонометрії з однією вузловою точкою
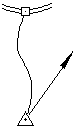
Мал. 11. Одиночний хід полігонометрії
2. Спосібвимірюванняокремого кута застосовується, якщо на пункті два
напрямки. В цьомувипадкувимірюється кут міждвоманапрямками.
Вимірюванняокремого кута в одному заходіздійснюється 2 півзаходами.
Перший півзахід:
а) наводятьпопередньовізирнувісьзорової труби при КЛ на ліву (задню
уході) марку, закріплюютьалідаду, встановлюють на лімбірозраховану
для даного заходу установку (кращевстановитивідлік на 0.1–0.2? більший
відрозрахованого);
б) виконуютьнаведеннятеодоліта на ліву марку і берутьдвічівідлік;
в) виконуютьнаведеннятеодоліта на праву марку і берутьдвічівідлік.
Другийпівзахід:
г) переводять трубу через зеніт, наводятьтеодолітнаправу марку і
двічіберутьвідлік;
д) виконуютьнаведення на ліву марку і двічіберутьвідлік.
При цьому в межах одного заходу алідадуобертаютьтільки за ходом
годинниковоїстрілкиаботількипроти ходу годинниковоїстрілки.
Здвохпівзаходівобчислюютьсереднєзначення кута в заході.
3. Що означає термін «Полігонометрія»?
Полігонометрія – це геодезичний спосіб створення планово-висотного обґрунтування. Полігонометрія базується на побудові на земній поверхні ходу у вигляді ламаної лінії, в якому вимірюються довжини всіх відрізків і кути між цими відрізками. За точністю полігонометрія ділиться на 4 класи,
4. Перевірка теодоліту Т2
Перевірка- виконання певних механічних та геометричних умов, яким повинен відповідати теодоліт.
Перевірка 1. Вісь циліндричного рівня горизонтального круга повинна бути перпендикулярною до осі обертання теодоліта
Виконання перевірки. Встановлюють теодоліт в робоче положення. Розташовують циліндричний рівень на горизонтальному крузі за напрямком двох піднімальних гвинтів і, обертаючи їх в різні сторони, приводять бульбашку рівня на середину. Після цього обертають горизонтальний круг на 180°. Якщо бульбашка рівня змістилась від нуль-пункта не більше однієї поділки, то умова виконана. В іншому випадку виконують юстирування
Юстирування. За станом циліндричного рівня за допомогою шпильки обертають виправний його гвинт так, щоб бульбашка повернулась до нуль-пункту на половину дуги відхилення. Після цього перевірку повторюють, аби переконатися, що умова виконується.
Перевірка2
Візирна вісь зорової труби повинна бути перпендикулярною до осі обертання труби
Виконання перевірки. На місцевості вибирають далеку точку, яку добре видно і наводять на неї зорову трубу при КП. Знімають відлік з горизонтального круга КП1. Після цього відкріплюють закріпні гвинти алідади горизонтального круга та зорової труби, переводять трубу через зеніт і при КЛ наводять її на ту ж саму точку, що і при КП1. З горизонтального круга знімають відлік КЛ1. Різниця не повинна перевищувати 1 минуту
Перевірка 3. Вертикальна нитка візирної сітки зорової труби повинна бути перпендикулярною до осі обертання труби.
Виконання перевірки. Приводять вертикальну вісь приладу в прямовисне положення і наводять центр візирної сітки на нитку закріпленого в 5-10 м від приладу виска. Якщо при підніманні і опусканні труби вертикальна нитка співпадає з лінією виска, то умова виконана. В іншому випадку виконують юстирування.
Юстирування. Відкручують ковпачок в окулярній частині зорової труби і відпускають чотири гвинти, за допомогою яких кріпиться окуляр до труби. Після цього повертають діафрагму так, щоб вертикальна нитка співпала з лінією виска. Далі закріплюють гвинти.
Первірка 4. Вісь обертання зорової труби повинна бути перпендикулярною до осі обертання теодоліта
Виконання перевірки. На відстані від стіни будинку 20-30 м встановлюють теодоліт. Встановлюють його в робоче положення і наводять центр візирної сітки на точку, яка розташована в верхній частині стіни. За допомогою зорової труби теодоліта проектують точку вниз на висоту приладу і позначують на стіні її проекцію. Після цього переводять трубу через зеніт і при другому положенні круга таким же способом одержують другу проекцію. Якщо обидві точки знаходяться в межах бісектору ниток, то умова виконана. В іншому випадку виконують юстирування тільки в спеціальних майстернях
Білет №2
1.
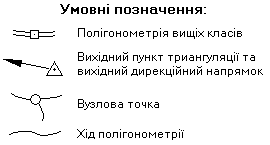
При створенні мереж полігонометрії 4
класу, 1 і 2 розрядів треба дотримуватися
вимог: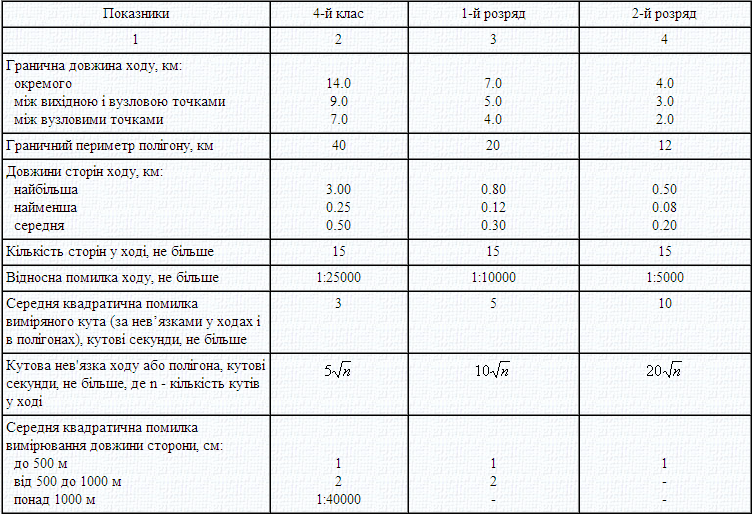
2. Спосіб кругових прийомів застосовують, коли кількість напрямків на пункті більше двох. Перед початком робіт, але не рідше одного разу на рік, прилади перевіряють і досліджують. При вимірюваннях способом окремого кута алідаду обертають тільки за ходом годинникової стрілки або тільки проти ходу годинникової стрілки. При вимірюваннях круговими прийомами в першому півприйомі алідаду обертають за ходом годинникової стрілки, а в другому - в протилежному напрямку. Кількість прийомів, у залежності від розряду полігонометрії і точності приладу, що застосовується, наведена в таблиці :

При переході від одного прийому до другого лімб переставляють на кут (180/m)+ σ, де: m - кількість прийомів, а σ = 10' або 5'.
3. Тріангуля́ція – один з головних методів створення мережі опорних геодезичних пунктів. Полягає в побудові рядів або мереж з прилеглих один до одного трикутників та визначенні розташування їх вершин у вибраній системі координат. Це основний метод створення державних планових геодезичних мереж. Вимірюють всі кути і одну базисну лінію. Кути вимірюють теодолітами, довжину базисної сторони – мірним дротом чи далекоміром.
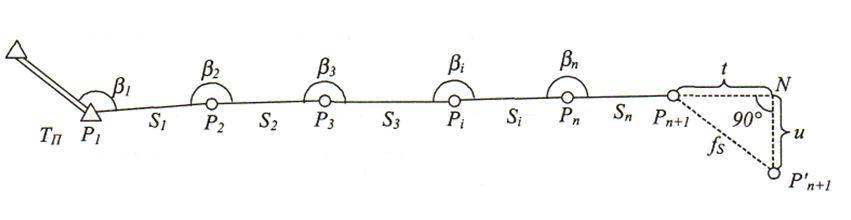
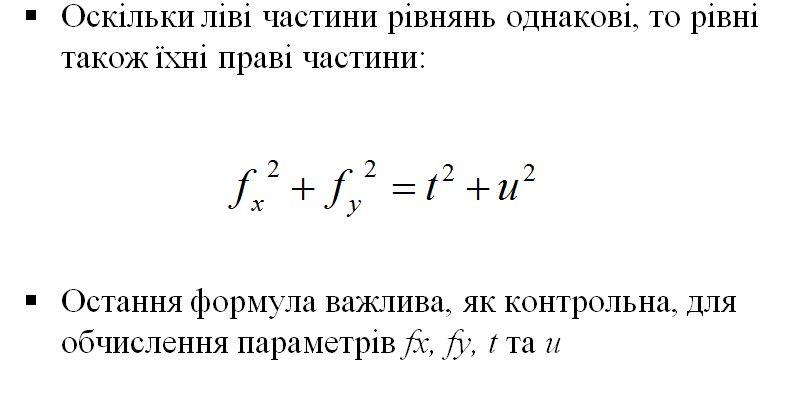
4.Повздовжні поперечні похибки витягнутого полігонометричного ходу

схема
Білет №3
1.Приблизні схеми побудови полігонометричних мереж згущення 4 класу, 1 та 2 розрядів
Мал. 9. Система ходів полігонометрії з кількома вузловими точками
Мал. 10. Система ходів полігонометрії з однією вузловою точкою

Мал. 11. Одиночний хід полігонометрії

2.

3. Трилатерація — один з методів визначення на місцевості координат пунктів геодезичних мереж, що здійснюється шляхом побудови системи трикутників та вимірів всіх їх сторін. На відміну від тріангуляції, де здійснюється вимір кутів усіх трикутників, у трилатерації застосовують саме вимір сторін.
Застосування
Для побудови геодезичних мереж згущення метод трилатерації найефективніший у разі застосування радіовіддалемірів, а також в умовах, несприятливих для кутових вимірів[1]. Для вимірів сторін також можуть застосовуватися світловіддалеміри, електронні тахеометри тощо.
Трилатерація застосовується у GPS-приймачах для визначення ними свого розташування виходячи із відстані до супутників, яка визначається за затримкою сигналу, що находить від них.
Трилатерацію може бути використано для виявлення місця розрядів блискавки. Детектори, що діють у загальній синхронізованій системі, можуть використовувати різницю в часі прибуття радіовипромінювання, що супроводжує розряд, щоб визначити відстань від детектора до розряду. Такі системи можуть бути корисні в лісовому господарстві для запобігання пожеж, для відстеження циклонів тощо.
4.Державна геодезична мережа (государственная геодезическая сеть; national geodetic network; staatliches Vermessungsnetz n) призначена для поширення єдиної системи координат на всій території держави і є основою для створення інших мереж та для наукових завдань. За точністю вимірювань, схемою та послідовністю побудови державні мережі поділяються на 3 класи. Мережа 1 класу є астрономо-геодезичною. ЇЇ створюють полігонами із рядів трикутників або ходів полігонометрії, орієнтованих приблизно вздовж паралелей та меридіанів, периметр яких приблизно 800 км. У кожній із чотирьох вершин полігона розміщують по 2 пункти Лапласа, в яких визначають астрономічні широти з точністю 0,3", довготи-0,03" та азимути-0,5", а також вимірюють сторони базисні або створюють мережі базисні. Мережі 2 класу створюють як суцільні всередині полігонів 1 класу. Мережа 3 класу є вставкою в мережі вищого класу. Мережі трилатерації 2-3 класів створюють так само, як мережі тріангуляції відповідного класу. Довжини сторін у них вимірюють з такою ж точністю, як вихідні сторони в мережі тріангуляції цього ж класу. Мережі 3 і 4 класів служать для забезпечення топографічного знімання та інженерних робіт. Державна геодезична мережа будується методами тріангуляції, полігонометрії і їх сполученням, забезпечуючи планові Х і У і поверхневі В і L координати пунктів. Висотну координату Z ( або Н ) визначають методами нівелювання: геометричним, тригонометричним, гідростатичним. Геодезичною мережею називається система точок на поверхні Землі, закріплених спеціальними центрами і знаками, координати яких визначено геодезичними методами. Метод тріангуляції запропонував у 1617 році голландський вчений Снелліус при вимірюванні дуги меридіану між містами Алькаамаром і Берген-он-Зоомом. Геодезична мережа складається з трикутників у яких вимірюються всі кути і одна або кілька сторін. Мережу редукують (відносять) на поверхню земного еліпсоїда або на площину. Маючи координати вихідної точки і азимут лінії, обчислюють координати всіх точок мережі.Метод тріангуляції застосовують у відкритій і напіввідкритій місцевості, гірській місцевості (див. статтю Проектування і рекогностування геодезичних мереж.).
В закритій місцевості застосовують метод полігонометрії у вигляді різного роду ходів і полігонів. В полігонометрії вимірюються всі кути і сторони.
До недавнього часу полігонометрія і тріангуляція були основними методами побудови державної геодезичної мережі. Вони були добре вивчені як у теоретичному так і в практичному плані. В останній час широке застосування находять методи побудови геодезичної мережі - трилатерація і лінійно-кутовий метод. Схема побудови геодезичної мережі в трилатерації і лінійно-кутовому методі така сама, як і в тріангуляції. У першому методі вимірюються лише сторони трикутників (кутів не виміряють), а в другому виміряють всі кути і всі сторони. В трилатерації виміряють всі довжини сторін радіовіддалемірами або світловіддалемірами, що дає більшу точність. Лінійно-кутовий метод - найточніший метод визначення геодезичних координат. Координати точок земної поверхні можна визначити астрономічними і супутниковими методами. Супутникова система GPS (Global Pozision System) забезпечує високу точність автономного визначення координат пунктів при мінімальному часі спостережень.
Державну мережу 1 і 2 класу використовують для створення єдиної системи координат, а також для вирішення наукових задач - визначення розмірів і фігури Землі, горизонтальних та вертикальних рухів земної кори і т. і. Мережі 3 і 4 класів служать для обгрунтування топографічного знімання дрібних масштабів до 1:10000. Державна геодезична мережа країни допускає похибку у взаємному положенні суміжних точок не більше як 1:25000. Геодезичні мережі згущення 1 і 2 розряду використовуються для обгрунтування топознімань в масштабах 1:5000-1:500 і для виконання інженерних робіт. Відносна похибка у взаємному положенні пунктів в цих мережах становить 1:10000. Знімальні мережі є основою для топографічних знімань всіх масштабів і створюються методами різного роду засічок, прокладанням теодолітних,мензульних ходів. Точність планових мереж 1:3000, а висотних 0,2*L½ , де L - довжина ходу в км.(L½-позначено корінь квадратний із L).
Білет №4
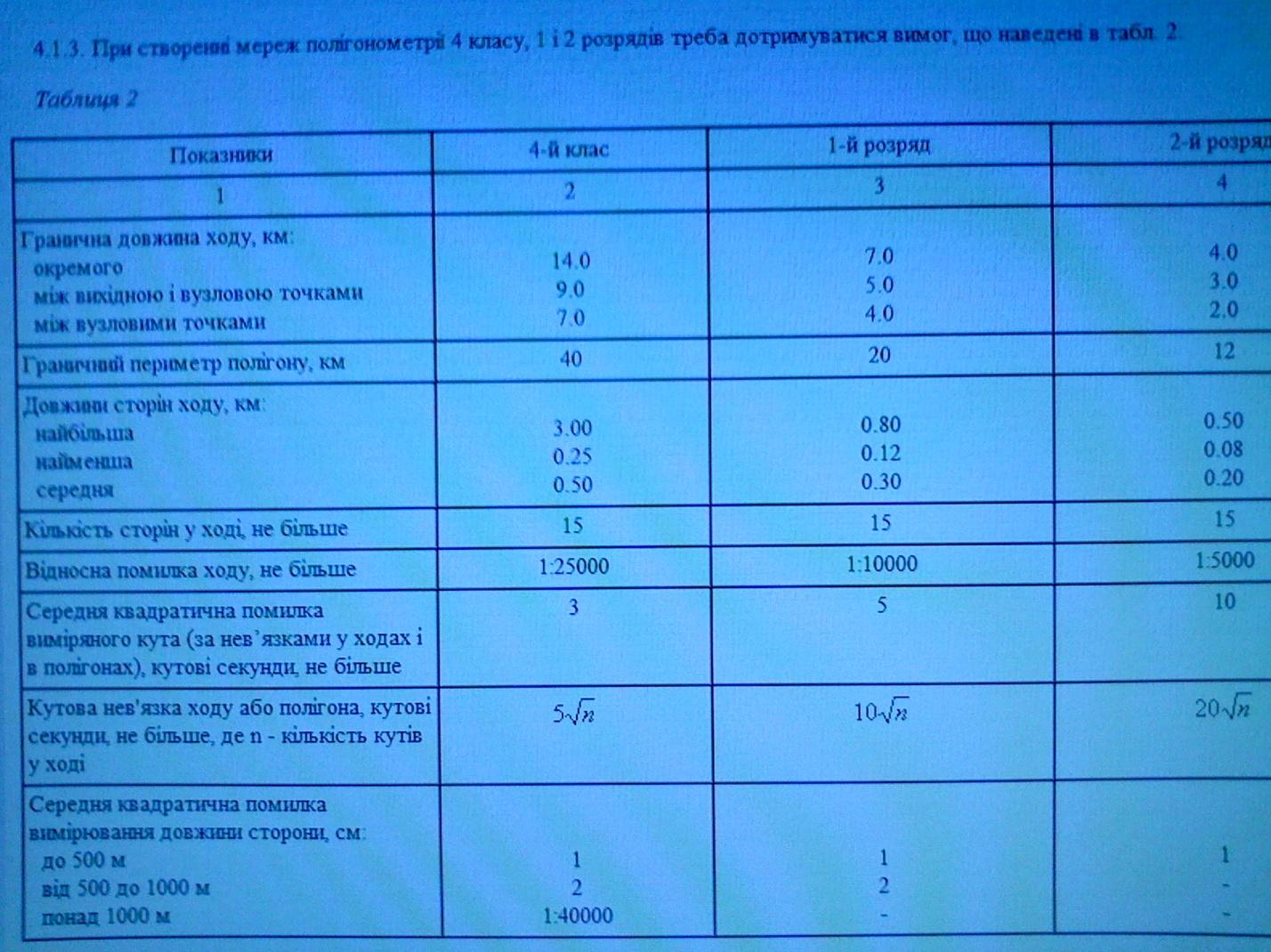
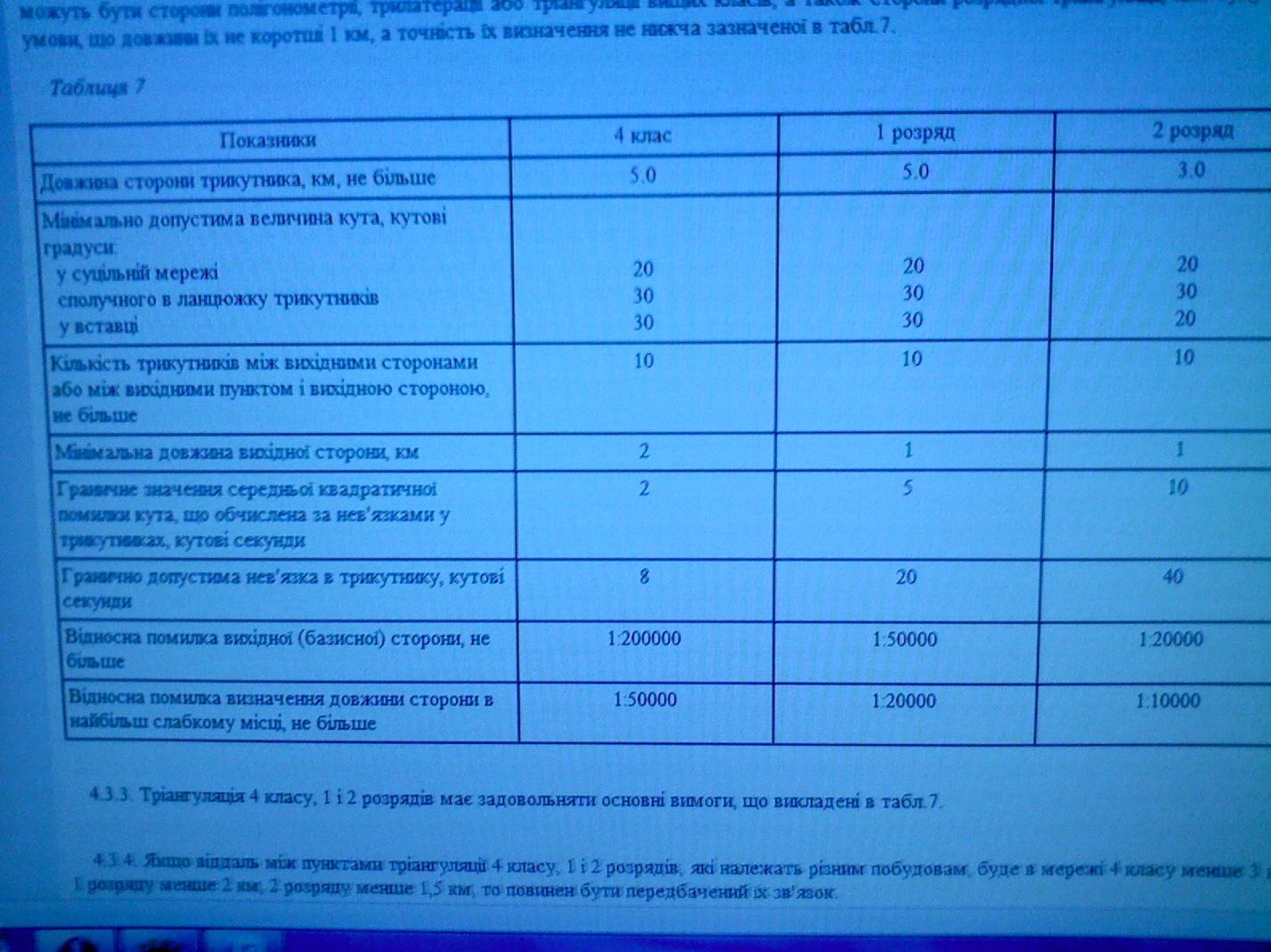
1.Трилатерація згущення: вимоги нормативних документів щодо основних технічних характеристик.
Трилатерація — один з методів визначення на місцевості координат пунктів геодезичних мереж, що здійснюється шляхом побудови системи трикутників та вимірів всіх їх сторін. На відміну від тріангуляції, де здійснюється вимір кутів усіх трикутників, у трилатерації застосовують саме вимір сторін.
|
Показники |
4 клас |
1 розряд |
2 розряд |
|
Довжина сторони трикутника , км |
2-5 |
0,5-5 |
0,25 - 3 |
|
Мінімально допустима величина кута трикутника |
30° |
20° |
20° |
|
Гранична довжина ланцюга трикутників між вихідними сторонами , або між вихідним пунктом і вихідною стороною ( км ) |
14,0 |
7,0 |
4,0 |
|
Кількість трикутників між вихідними сторонами або між вихідним пунктом і вихідною стороною |
10 |
10 |
10 |
|
Мінімальна довжина вихідної сторони , км |
2 |
1 |
1 |
|
Відносна середня квадратична похибка вимірювання сторони мережі |
1:120000 |
1:80000 |
1:40000 |
2. Приведення спостережень до ценнтрів знаків
Якщо з якихось причин не встається встановити теодоліт на пункті, з якого потрібно поміряти кут (пункт С), наприклад в створі напряму вимірювання виросло дерево, то можна виконати позацентрові вимірювання наступним чином. Поруч з пунктом С забиваємо кілочок в т.І так, щоб з точки І було видно пункт С і пункт М. В кілочок забиваємо цвях і міряємо відстань СІ, яка дорівнює Є. Потім встановлюємо над точкою І теодоліт, центруємо, горизонтуємо та еремо відліки в напрямку точок С та М. Визначаємо кут θ.
SinX/l=Sin θ/d
Sinx=(l/d)* θ
Обчислюємо виправлений відлік
Мвипр.=М+х
Аналогічно, коли в т.М знаходиться теодоліт, а в точці С візирна марка можна поруч з візирною маркою розбити кілочок І, виміряти відстань е' та порахувати поправку х та визначити Мвипр. за наведеними вище формулами.
Елементи е та е' наз. лінійними елементами з центрування та редукції відповідно, кути θта θ' наз. кутовими елементами центрування та редукції.
Кути θта θ' вимірюються від лінійних елементів е та е' за годинниковою стрілкоюв напрямку пункту М. Ведення поправок на центрування та редукцію називаютьприведенням спостережень до центрів знаків.
3. GPS, Систе́ма глоба́льного позиціонува́ння (англ. Global Positioning System) — сукупність радіоелектронних засобів що дозволяє визначати положення та швидкість руху об'єкта на поверхні Землі або в атмосфері. Положення об'єкту обчислюється на ньому завдяки використанню GPS-приймача, який приймає та обробляє сигнали супутників космічного сегменту GPS системи глоба́льного позиціонува́ння. Для визначення точних параметрів орбіт супутників та керування, GPS система в своєму складі має наземні центри управління.
Коли мова йде про GPS, частіше за все мається на увазі система NAVSTAR, розроблена на замовлення військового відомства — Управління Оборони США, але на даний час існують або розробляються також інші системи глобального позиціонування (ГЛОНАСС, Galileo та інші).
4. 1. Польові вимірювання..
2.Попередня обробка результатів польових спостережень:
1)перевірка і обробка польових журналів;
2)обчислення ліній, приведених на площу в проекції Гаусса-Крюгера і на рівень моря;
3)складання робочої схеми полігонометричного ходу;
4)обчислення кутової нев'язки ходу та порівняння її з допустимим значенням;
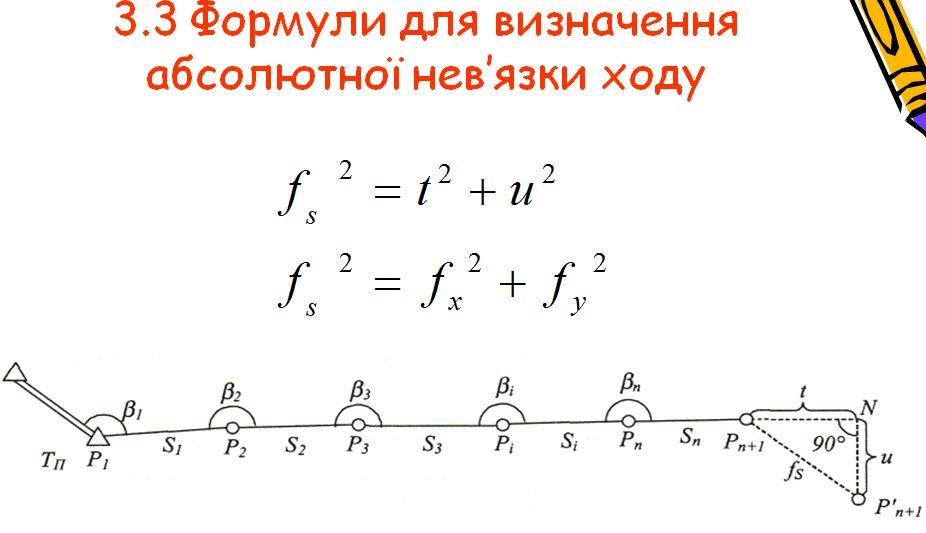
5)обчислення нев'язок координат , абсолютної та відносної похибки та порівняння їх з допустимими значеннями;
6)визначення поздовжнього і поперечного зміщень кінцевої точки ходу;
7)оцінка точності кутових вимірів;
8)оцінка точності лінійних вимірів.
3.Перевірка та обробка польових журналів
Білет №5
1. Тріангуляція один з методів створення мережі опорних геодезичних пунктів і сама мережа, створена цим методом; полягає в побудові рядів або мереж трикутників, що примикають один до одного, і у визначенні положення їх вершин у вибраній системі координат. У кожному трикутнику вимірюють всі три кути, а одну з його сторін визначають з обчислень шляхом послідовного вирішення попередніх трикутників, починаючи від того з них, в якому одна з його сторін отримана з вимірів. Якщо сторона трикутника отримана з безпосередніх вимірів, то вона називається базисною стороною
Основні схеми побудови

2. Углы в триангуляции 1 и 2 разрядов измеряют круговымиприемами теодолитами Т2, Т5 и другими им равноточными приборамичислом приемов и с соблюдением допусков. Если приемы не удовлетворяют установленным допускам поколебанию значений направлений, то они подлежат повторению на те же установках лимба.При отсутствии грубых ошибок в обработку принимаются основной иповторный приемы.При измерении углов в триангуляции 1 и 2 разрядов спримычных (исходных) пунктов в программу измерений должно бытьвключено 1 - 2 направления исходной сети.Направления триангуляции 1 и 2 разрядов можно объединять водной группе и измерять по программе 1 разряда.
3. GPS, Систе́ма глоба́льного позиціонува́ння (англ. Global Positioning System) — сукупність радіоелектронних засобів що дозволяє визначати положення та швидкість руху об'єкта на поверхні Землі або в атмосфері. Положення об'єкту обчислюється на ньому завдяки використанню GPS-приймача, який приймає та обробляє сигнали супутників космічного сегменту GPS системи глоба́льного позиціонува́ння. Для визначення точних параметрів орбіт супутників та керування, GPS система в своєму складі має наземні центри управління.
Коли мова йде про GPS, частіше за все мається на увазі система NAVSTAR, розроблена на замовлення військового відомства — Управління Оборони США, але на даний час існують або розробляються також інші системи глобального позиціонування (ГЛОНАСС, Galileo та інші).
4. 1. Польові вимірювання..
2.Попередня обробка результатів польових спостережень:
1)перевірка і обробка польових журналів;
2)обчислення ліній, приведених на площу в проекції Гаусса-Крюгера і на рівень моря;
3)складання робочої схеми полігонометричного ходу;
4)обчислення кутової нев'язки ходу та порівняння її з допустимим значенням;
5)обчислення нев'язок координат , абсолютної та відносної похибки та порівняння їх з допустимими значеннями;
6)визначення поздовжнього і поперечного зміщень кінцевої точки ходу;
7)оцінка точності кутових вимірів;
8)оцінка точності лінійних вимірів.
3.Перевірка та обробка польових журналів
Білет №6
2. Повірки та дослідження кутомірних приладів
1. Перевірка працездатності та взаємодії рухомих вузлівт еодоліта. Перевіркастійкості штатива і підставки.
2. Перевірка та юстуваннянаставнихрівнів.
3. Перевіркаправильностівстановлення ниток зорової труби.
4. Перевіркаперпендикулярностівізирноїосі до осіобертаннязорової труби (колімаційнапомилка). Величина подвійноїколімаційноїпомилки не повинна перевищувати 20''.
5. Перевіркаперпендикулярностігоризонтальної та вертикальної осей. Величина перпендикулярності осей (кут і) не повинен бути більше 5''.
6. Перевірка суміщенняв ізирної осі оптичного центриру з віссю обертання алідади.
7. Перевірка роботи компенсатора.
8. Перевірк амісця нуля (зеніту) вертикального круга.
9. Дослідження систематични хпомилок оптичного мікрометра, які не повинні перевищувати 1'' для теодолітів типу Т-1 і 1''.5 - для теодолітів типу Т-2.
10. Визначення помилок суміщення штрихів по горизонтальному і вертикальному кругах. Середня квадратична помилка одного суміщення в теодоліті типу Т-1 не повинна перевищувати 0.3'' для мікрометра горизонтального круга і 0.6'' для мікрометра вертикального круга; у теодолітах типу Т-2 відповідн івеличини повинні бути 0.5'' і 0.6'';
11. Визначення мертвого ходу оптичного мікрометра. Окремі різниці "право мінусліво" повинні лежати в границяхвід -1'' до +1'' у теодолітів типу Т-1.
12. Дослідження ексцентриситету горизонтального круга. Ексцентриситет лімба не повинен перевищувати 20'' для теодолітів типу Т-1 і 40'' для теодолітів типу Т-2.
13. Визначення ексцентриситет уалідади горизонтального круга. Ексцентриситет алідади горизонтального круга не повинен перевищувати 20'' для теодолітів типу Т-l і 40'' для теодолітів типу Т2.
14. Визначення ренуоптичного мікрометра.
Величини , не повинні перевищувати 0.5'' у теодолітах типу Т-1 і 1'' - у теодолітах типу Т-2.
3.Організація полігонометричних робіт
Назвемо, перш за все, основні види робіт, що виконують під час створення полігонометричних
мереж в послідовності їх виконання:
1. Складання проекту,
2. Рекогностування, вибір місця закладання та типів знаків.
3. Закладання знаків.
4. Дослідження та перевірки приладів.
5. Прив'язування пунктів майбутньої (запроектованої) мережі до пунктів державної мережі.
6. Лінійні вимірювання.
7. Кутові вимірювання. Лінійні і кутові вимірювання можуть виконуватися окремо або одно-
часно.
8. Попередні обчислення. Обчислення робочих координат.
9. Виконання зрівноваження.
10. Оцінка точності виміряних та зрівноважених величин.
11. Складання каталогу координат.
12. Складання технічного звіту
4. Що означає термін «замикаюча полігонометричного ходу»
Замикаюча ходу — це пряма, яка з'єднує початкову і кінцеву точки окремого ходу. Використовується для того, щоб вияснити, який хід вважається видовженим, а який зігнутим
Білет №7
1. Розвиток геодезичних мереж можна виконувати також за
допомогою GPS спостережень . Для визначення координат геодезичних
пунктів застосовують такі методи GPS - знімання :
- статичний ( статичне знімання ) ;
- кінематичний ( кінематичне знімання );
- псевдокінематичний ( статичний переривчатий ).
Вибір методу знімання залежить від вимог до точності визначення
пунктів .
Державною висотною геодезичною мережою являються нівелірні
мережі І , II , III і IV класів точності . Нівелірна мережа І і II класів є
головною висотною основою за допомогою якої встановлюється єдина
система висот на всій території України . Нівелірна мережа III і IV
15
класів служить для забезпечення висотами топографічних знімань і
рішення інженерних задач .
2. Вплив і облік горизонтальної рефракції при вимірюванні кутів у міській полігонометріїВнаслідок дії сонячної радіації на забудованих територіях можуть утворюватися малі, але вельми сталі і потужні рефракційних поля. Локальні поля рефракції постійного напряму можуть також виникати біля стін промислових споруд, нагрівають або охолоджують протягом технологічних процесів.Горизонтальні градієнти показника заломлення таких полів поблизу випромінювальних тепло стін можуть приймати значення, що перевищують на 2-3 порядки відповідні градієнти рефракційного поля над містом. Тому вплив горизонтальної рефракції на кутові вимірювання в мережах міський полігонометрії, ходи якої прокладають вздовж вулиць, а виміру ведуть зі штативів, може бути досить значним і мати систематичний характер.
Горизонтальну рефракцію можна враховувати на стадії проектування мережі, при реалізації програми вимірювань, а також при математичній обробці результатів вимірювань, вводячи поправки на підставі виміряних метеоелементів. Останній шлях найбільш трудомісткий.
Дослідженням горизонтальної рефракції в міській полігонометрії присвячені роботи [22, 36] та ін У них показано, що рефракція біля стін будівель буває досить значною, проте діючі в геодезичному виробництві нормативні документи ще не дають чітких вказівок по її обліку.Про вплив горизонтальної рефракції в міській полігонометрії можна судити за характером температурного поля вулиці чи денним ходу горизонтальних кутів.Розглянемо результати [36] багатоденних синхронних кутових і метеорологічних вимірювань, виконаних в 1979-1981 рр..