

Порядок выполнения задания
Рассмотрим первый вариант кинематической схемы, приведенный на рис. 1.
|
Рис. 2
|
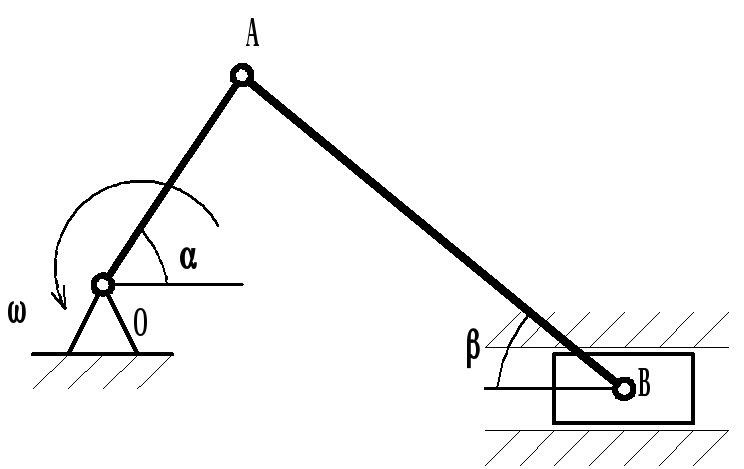
Дано: ОА=16 см, АВ=28 см, ω= 2,8 1/c, ε=0, α=400, β=280 . Определить: υA , aA, ωAB, υB ,aB . |
Решение:
1. Вычертим в масштабе (в данном случае удобно 1:4) расчетную схему механизма (рис. 3).
Анализируем движение механизма: кривошип ОА совершает вращательное движение вокруг точки О, с заданной угловой скоростью ω, шатун АВ – плоскопараллельное движение, а ползун В – возвратно-поступательное движение вдоль направляющей по прямой, параллельной оси Х.

Рис. 3
2. Определение скоростей.
2.1. Определим скорость точки А.
Определяя скорость точки А (центра шарнира А), будем рассматривать ее принадлежность к кривошипу ОА, совершающему вращательное движение.
При вращении твердого тела скорость любой его точки равна по величине произведению угловой скорости на расстояние до оси (центра) вращения.
Следовательно, вращательная скорость точки А равна по величине
![]() ;
;
![]() (см/с);
(см/с);![]() .
.
Итак,
![]() см/с.
см/с.
2.2. Определим ωAB (мгновенную угловую скорость звена АВ и υB .
Шатун совершает плоско-параллельное движение.
Напомним, что существует два способа исследования плоского движения: в первом оно представляется как совокупность поступательного движения с некоторой полюсной точкой и вращения вокруг этой точки, во втором – как вращение вокруг мгновенных центров.
Для определения мгновенной угловой скорости звена АВ и скорости точки В воспользуемся вторым способом исследования плоского движения.
Найдем положение
мгновенного центра скоростей звена АВ.
В случае, когда известны линии действия
скоростей двух точек тела, мгновенный
центр скоростей определяем как точку
пересечения перпендикуляров к этим
линиям действия. Следовательно,
восстановив в точках А и В перпендикуляры
к линиям действия
![]() и
и![]() (точка
В, связанная направляющей , может
перемещаться только по прямой, параллельной
оси Х), находим мгновенный центр скоростей
Р как точку их пересечения.
(точка
В, связанная направляющей , может
перемещаться только по прямой, параллельной
оси Х), находим мгновенный центр скоростей
Р как точку их пересечения.
В данное мгновение скорости всех точек звена АВ будут такими, как и при вращении этого тела вокруг Р с угловой скоростью ωAB . Отсюда
![]() ,
,
![]()
Найдем АР. Доля
этого определим углы и стороны треугольника
АВР.
![]() ;
;![]()
![]() .
.
По теореме синусов
![]() ;
;
![]() (см).
(см).
Найдем ВР
![]() (см).
(см).
Итак,
![]() (1/с)
(1/с)
Скорость точки В во вращательном движении звена АВ вокруг мгновенного центра скоростей равна
![]() (см/с).
(см/с).
3. Определение ускорений.
3.1. Вычисляя ускорение точки А, воспользуемся ее принадлежностью к кривошипу ОА.
Напомним, что при вращении твердого тела ускорение любой точки определяется как геометрическая сумма центростремительного и вращательного ускорений, то есть
![]() (где
(где
![]() и
и![]() ).
).
Центростремительное ускорение всегда направлено к центру (к оси) вращения, а вращательное ускорение колинеарно скорости (перпендикулярно радиусу).
Итак, найдем ускорение точки А, учитывая, что по условию задачи ω=const, ε=0.
![]() (где
(где
![]() );
);![]() ;
;![]() .
.
Следовательно ![]() (см/с2).
(см/с2).
3.2. Перейдем к определению ускорения точки В шатуна АВ, совершающего плоскопараллельное движение. Выше было сказано о двух способах исследования плоскопараллельного движения твердого тела. Для определения ускорения точки В воспользуемся первым способом, где плоское движение представляем как совокупность поступательного движения с некоторой полюсной точкой и вращения относительно этой точки.
Принимая за полюс точку А (ускорение которой мы уже определили), получим следующее векторное уравнение
![]() (1)
(1)
Ускорение
![]() см/с2
и направлено вдоль звена ОА к центру О.
Относительное центростремительное
ускорение
см/с2
и направлено вдоль звена ОА к центру О.
Относительное центростремительное
ускорение
![]() направлено вдоль звена ВА к центру
вращения А и равно по величине
направлено вдоль звена ВА к центру
вращения А и равно по величине
![]() (
см/с2).
(
см/с2).
Здесь
![]() - угловая скорость во вращении точки В
относительно точки А, но угловая скорость
вращательного движения не зависит от
выбора полюса, следовательно используем
- угловая скорость во вращении точки В
относительно точки А, но угловая скорость
вращательного движения не зависит от
выбора полюса, следовательно используем![]() ,
которая являлась угловой скоростью во
вращении относительно мгновенного
центра скоростей – точки Р.
,
которая являлась угловой скоростью во
вращении относительно мгновенного
центра скоростей – точки Р.
Модуль относительного
вращательного ускорения (![]() )
неизвестен, так как неизвестно мгновенное
угловое ускорение звена АВ, однако
направление известно: вектор относительного
вращательного ускорения перпендикулярен
вектору относительного центростремительного
ускорения.
)
неизвестен, так как неизвестно мгновенное
угловое ускорение звена АВ, однако
направление известно: вектор относительного
вращательного ускорения перпендикулярен
вектору относительного центростремительного
ускорения.
Продолжим решение графическим способом.
Чтобы определить
![]() по имеющимся данным, изобразим графически
векторное равенство (1). Для этого от
точки В в принятом масштабе ускорений
(удобно 1:10) отложим вектор
по имеющимся данным, изобразим графически
векторное равенство (1). Для этого от
точки В в принятом масштабе ускорений
(удобно 1:10) отложим вектор![]() параллельный звену ОА; а затем из его
конца также в масштабе, построим вектор
параллельный звену ОА; а затем из его
конца также в масштабе, построим вектор![]() ,
параллельный АВ. Для двух оставшихся
неизображенными членов равенства (1):
,
параллельный АВ. Для двух оставшихся
неизображенными членов равенства (1):![]() и
и![]() известны только их направления. Линией
действия
известны только их направления. Линией
действия![]() является прямая, вдоль которой движется
ползун В, а линия действия
является прямая, вдоль которой движется
ползун В, а линия действия![]() перпендикулярна АВ. Имея ввиду сказанное,
проводим из точки В линию действия
перпендикулярна АВ. Имея ввиду сказанное,
проводим из точки В линию действия![]() ,
а из конца изображения вектора
,
а из конца изображения вектора![]() (точкаD)
луч, параллельный
(точкаD)
луч, параллельный
![]() (перпендикулярно АВ). Находим точку
пересечения построенных лучей (точка
С ) и расставляем стрелки в соответствии
с векторным уравнением (1), достраивая
многоугольник ускорений (или план
ускорений) механизма. Графически задача
решена. Измерив линейкой отрезок ВС,
можно определить величину ускорения
точки В:
(перпендикулярно АВ). Находим точку
пересечения построенных лучей (точка
С ) и расставляем стрелки в соответствии
с векторным уравнением (1), достраивая
многоугольник ускорений (или план
ускорений) механизма. Графически задача
решена. Измерив линейкой отрезок ВС,
можно определить величину ускорения
точки В:
![]() , где
, где
![]() - выбранный масштаб построения плана
ускорений.
- выбранный масштаб построения плана
ускорений.
Легко убедиться
в том, что сделанное построение
соответствует векторному равенству
(1). Действительно на чертеже показано,
что геометрическая сумма направленных
отрезков BE,
ED и DC
(![]() равна отрезку ВС (
равна отрезку ВС (![]() ).
).
3.3. Определим
![]() аналитически.
аналитически.
Проведем оси X и Y. Перепишем уравнение (1) в проекциях на ось X.
![]() ,
,
![]() (см/с2).
(см/с2).
В заключении
рекомендуется проконтролировать
аналитически полученные результаты:
расстояния от точек А и В до мгновенного
центра скоростей и величину ускорения
![]() по графическим построениям, сравнить
геометрически и аналитически полученные
результаты и сделать выводы по работе.
по графическим построениям, сравнить
геометрически и аналитически полученные
результаты и сделать выводы по работе.
Заключительная часть
Подвести итог занятия. Оценить работу курсантов. Установить срок защиты расчетно-графической работы курсантами.