matlab / отчет5
.doc
Завдання
Складіть структурну схему АД для дослідження усталених режимів роботи, та промоделюйте асинхронний двигун із короткозамкненим ротором. Параметри короткозамкнених АД оберіть із табл.1.1.
Отримайте графіки перехідних процесів при прямому пуску АД, накиді та скиді номінального навантаження – залежності діючих значень струму статора, ротора та електромагнітного моменту та швидкості АД в функції часу – з урахуванням та без урахування електромагнітної інерції АД.
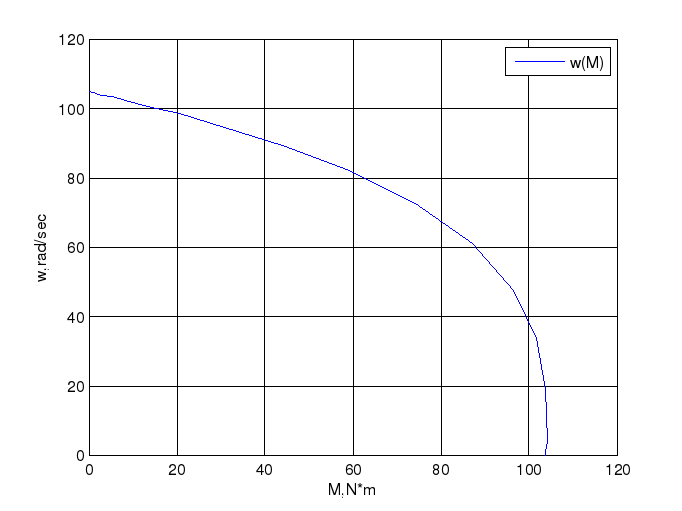
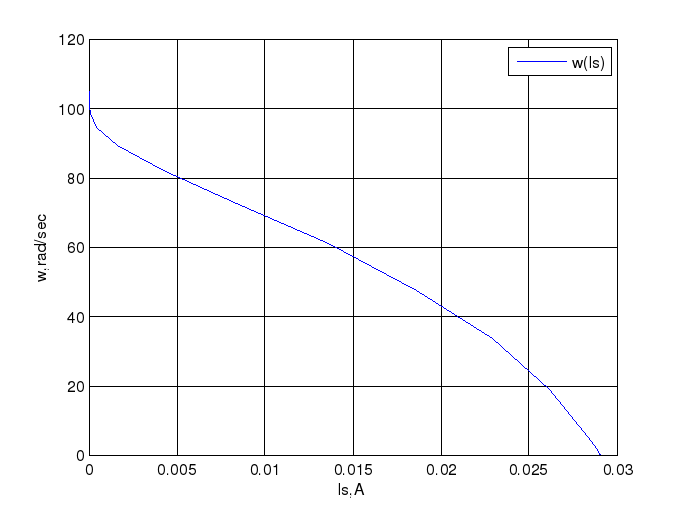
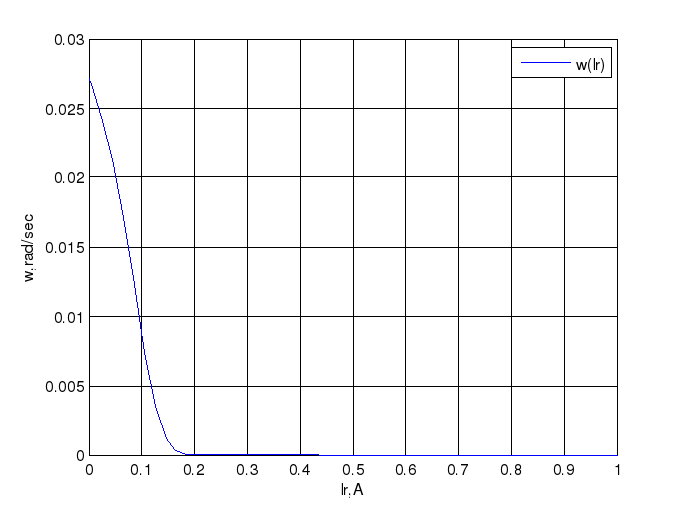
Отримайте статичні характеристики двигуна – залежності струмів статора і ротора, електромагнітного моменту в функції швидкості (або ковзання) АД.
Побудуйте графіки перехідних процесів, отримані за допомогою розробленої моделі, і відповідні графіки, отримані за допомогою моделі АД в ортогональній системі координат, в одній системі координат. Аналогічним чином в одній системі координат побудуйте статичні і динамічні характеристики АД. Оцініть похибку, яку вносить обчислення сигналу електромагнітного моменту за допомогою формул Клосса.
Встановіть, як впливає на перехідні процеси, отримані за допомогою статичної моделі, зміна визначеного параметру (табл.5.1). Побудуйте в одній системі координат статичні характеристики АД при різних значеннях визначеного параметру.
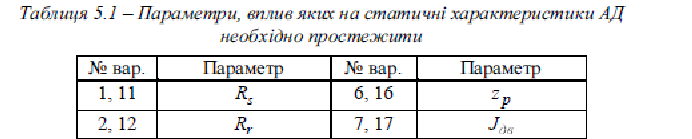

Рисунок 5.2 - структурну схему АД для дослідження усталених режимів роботи
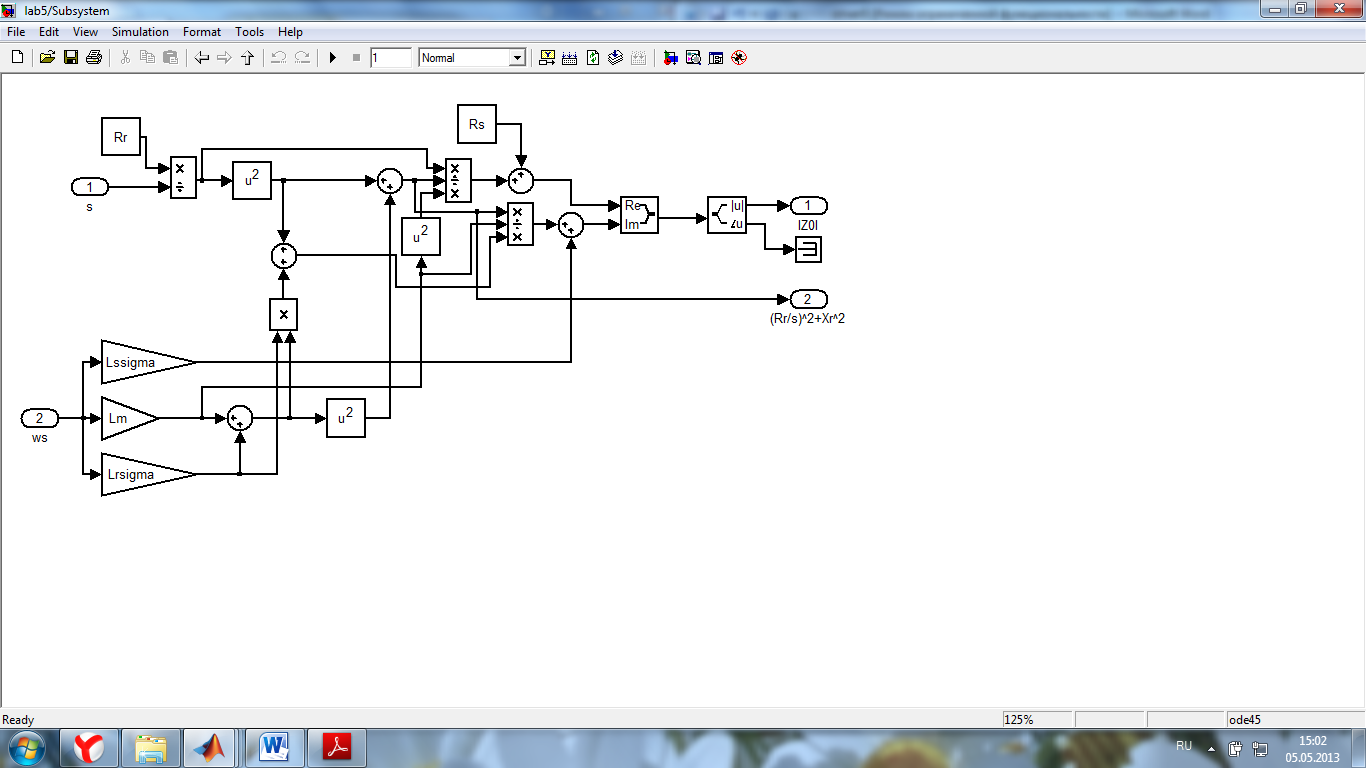
Рисунок 5.3 – Структурна схема блоку обчислення комплексного опору АД
|
Программа 1:
clc, close all, clear all
Pn=2.2*1000; nn=875; Ixx=4.6; J=0.028*5; Isn=7.2; Irn=4.5; Rr=5.7; Rs=3.6; Xrsigma=2.63; Xssigma=2.58; Uslen=380; Zp=3; f=50;
n0=3000/Zp; sn=(n0-nn)/n0; w0=2*pi*n0/60; wn=w0*(1-sn); wsn=2*pi*f; Usfen=Uslen/sqrt(3); Usfm=Usfen*sqrt(2); Mn=Pn/wn;
Xm=(Usfen-Ixx*sqrt(Rs^2+Xssigma^2))/Ixx; Xk=Xssigma+Xrsigma; sigmas=Xssigma/Xm; sigmar=Xrsigma/Xm; sigma=1-1/((1+sigmas)*(1+sigmar)); Lm=Xm/wsn; Lssigma=Lm*sigmas; Lrsigma=Lm*sigmar; Lr=Lm+Lrsigma; Ls=Lm+Lssigma; Ks=Lm/Ls; Kr=Lm/Lr; Tor=sigmas*Lr/Rr; Tos=sigmar*Ls/Rs; Mk=3*Uslen^2/(4*w0*(sqrt(Rs^2+Xk^2)+Rs)); sk=Rr/sqrt(Rs^2+Xk^2); ksi=(Rs/Rr)*sk;
|
Программа 2:
figure(1) plot(M(:,2),w(:,2)),grid on,hold on legend('w(M)') xlabel('M,N*m') ylabel('w,rad/sec')
figure(2) plot(Is(:,2),w(:,2)),hold on,grid on legend('w(Is)') xlabel('Is,A') ylabel('w,rad/sec')
figure(3) plot(t,Ir(:,2)),hold on,grid on legend('w(Ir)') xlabel('Ir,A') ylabel('w,rad/sec')
|