

ТСА / Лабораторные работы
.pdfМіністерство освіти і науки України
Приазовський державний технічний університет
Сокол С.П.
Методичні вказівки до виконання лабораторних робіт
“Технічні засоби автоматизації”
галузь знань: 0502 - Автоматика та управління напрям підготовки: 6.050202 - Автоматизація та комп'ютерно-інтегровані
технології
Маріуполь 2012
2
Приазовський державний технічний університет
Кафедра автоматизації технологічних процесів та виробництв
Сокол С.П.
Методичні вказівки до виконання лабораторних робіт
“Технічні засоби автоматизації”
галузь знань: 0502 - Автоматика та управління напрям підготовки: 6.050202 - Автоматизація та комп'ютерно-інтегровані
технології
Маріуполь 2012
3
УДК 658.5 Методичні вказівки до виконання лабораторних робіт з дисципліни “Технічні
засоби автоматизації” для студентів за напрямом підготовки 6.050202 “Автоматизація та комп’ютерно-інтегровані технології”, форма навчання денна/заочна/прискорена. //Уклав С.П. Сокол. – Маріуполь: ПДТУ, 2012. – 76 с.
Викладено вимоги і завдання до лабораторних робіт з дисципліни «Технічні засоби автоматизації».
Рецензенти: |
ст. викладач А.Б. Ісаєв |
Укладач: |
ст. викладач С.П. Сокол |
Відповідальний за випуск: |
доц. О.І. Сімкін |
Затверджено на засіданні кафедри АТПіВ Протокол № 2 від 3 вересня 2012 р.
Зав. кафедри |
Сімкін О.І. |
Погоджено навчально-методичною комісією кафедри АТПіВ Протокол № 2 від 3 вересня 2012 р.
Голова комісїі |
Добровольська Л.О. |
4
Лабораторная работа №1
Экспериментальное исследование промышленного регулятора типа РП4-У
1.Цель работы
Вработе необходимо изучить принцип действия, конструкцию и способы формирования законов регулирования регулятора РП4-У; экспериментально определить динамические характеристики регулятора, работающего по ПИзакону, и на основании экспериментальных данных произвести градуировку органов настройки регулятора.
2.Основные теоретические положения
Регулятором называют совокупность технических средств автоматики, предназначенных для автоматического регулирования параметров. Входной величиной регулятора является сигнал ошибки x:
x xз xт ,
где xз – заданное значение регулируемой величины; xт – текущее значение регулируемой величины.
На основании сигнала ошибки регулятор формирует выходную величину (управляющее воздействие) y, которая представляет собой перемещение регулирующего органа.
Алгоритмом действия (законом регулирования) регулятора называют зависимость между выходной y и входной x величинами регулятора.
Регулятор РП4-У может действовать по П-закону (пропорциональный регулятор), если его формирующая часть охвачена жесткой обратной связью. Уравнение идеального П-регулятора имеет вид
y( ) Kp |
x( ) |
(2.1) |
|
|
При охвате усилительной части регулятора гибкой обратной связью в виде апериодического звена (жесткая обратная связь при этом должна быть отключена) регулятор формирует ПИ-закон и называется ПИ-регулятором (изодромным). Уравнение идеального ПИ-регулятора имеет вид
|
1 |
|
|
|
|
|
|||
y( ) Kp x( ) |
x( )d |
|
||
T |
(2.2) |
|||
|
u |
0 |
|
|
|
|
|
|
|
В уравнениях (2.1) и (2.2): Kp – коэффициент, передачи регулятора, численно равный перемещению регулирующего органа, вызванному единичным изменением сигнала ошибки; Ти – время изодрома (время интегрирования или время удвоения), равное времени, за которое перемещение регулирующего органа
5
удваивается по сравнению с перемещением, вызванным действием пропорциональной части регулятора.
Параметры Kp и Ти являются настроечными параметрами регулятора.
3. Структурная динамическая схема реального ПИ-регулятора Характер преобразования сигналов в регуляторе рассмотрим, используя его
структурную схему (рис. 3.1). Динамические свойства основных элементов схемы регулятора представлены их передаточными функциями.
Используя структурную схему регулятора, определим зависимость между его выходной у(Р) и входной x(P) величинами:
y(p) Wp (p) x(p), |
(3.1) |
где
W |
(p) K |
K |
|
1 |
|
|
|
K6 |
K |
|
|
1 |
(3.2) |
5 T p 1 |
|
K6K7 |
|
T p |
|||||||||
p |
3 |
|
1 |
|
8 |
|
|
||||||
|
|
|
|
ф |
|
|
|
|
s |
|
|||
|
|
|
|
|
|
|
|
||||||
Tи p 1
После преобразования выражения (3.2) получим
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
K |
K |
K |
|
|
T p 1 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
||||
|
|
|
8 |
|
|
|
|
|
|
|
|
||||||||||||||
W |
|
(p) |
|
3 |
5 |
6 |
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
(3.3) |
|||
p |
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|||||||||||
|
|
T (1 K |
K |
|
) |
|
p |
|
|
|
|
|
|
|
T p |
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
u |
p 1 |
|
|
|
||||||||||||
|
|
|
s |
|
|
6 |
|
7 |
|
|
|
|
|
|
|
ф |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1 K6K7 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Выражение (3.3) умножим и разделим на Ти и введем обозначения
Tu |
T ; |
K3K5K6K8 |
K |
p |
, |
|
|
||||
|
ПИ |
Ts (1 K6K7 ) |
|
||
1 K6K7 |
|
|
|||
тогда окончательно получим уравнение регулятора
|
1 |
|
|
1 |
|
|
|
1 |
|
|
|
(3.4) |
y(p) Kp 1 |
|
|
|
|
|
|
|
x(p) |
||||
T p |
T p 1 |
|
1 |
|||||||||
|
|
|
|
T p |
|
|
||||||
и |
ПИ |
|
ф |
|
|
|
|
|||||
Таким образом, реальный ПИ-регулятор с устройством демпфирования представляет собой совокупность последовательно соединенных: идеального ПИрегулятора и двух балластных апериодических звеньев.
Наличие балластных звеньев повышает инерционность регулятора. При работе регулятора в системе автоматического управления высокоинерционным объектом (регулирование температуры, влажности и т.п.) демпфер обычно отключают, улучшая тем самым динамические свойства регулятора.
Как следует из выражения (3.3), коэффициент передачи регулятора Кр
6
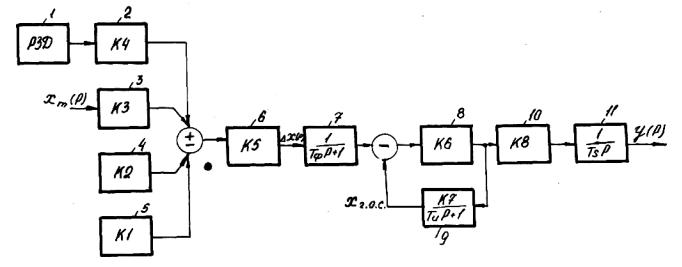
можно изменять, воздействуя на ряд параметров (К3, К5, К6, К7, К8, Ти, ТS). Обычно для регуляторов РП4-У коэффициент Кр изменяют изменением чувствительности К3 по входному сигналу (рукоятка « 1») либо коэффициентом передачи К7 в цепи гибкой обратной связи (рукоятка « n»).
Второй параметр настройки регулятора – время изодрома Ти – изменяют подбором значения сопротивления RС-цепочки модуля обратной связи (рукоятка
" и").
Рисунок 3.1 – Структурная схема ПИ-регулятора типа РП4-У 1 – внешний задатчик; 2 – внутренний задатчик; 3,4,5 – потенциометрические
делители напряжения входных сигналов (чувствительности – 1, 2 и 3); 6 – входной блок регулятора (формирователь сигнала ошибки); 7 – демпфер; 8 – усилительные каскады; 9 – модуль упругой обратной связи; 10 – пусковое устройство исполнительного механизма; 10 – исполнительный механизм.
4. Основные сведения о регуляторе РП4-У Регуляторы типа РП4 входят в агрегатированный комплекс АКЭСР системы
ГСП и выпускаются следующих модификации: РП4-У – для работы в системах управления с унифицированными сигналами в виде постоянного тока или напряжения постоянного тока; РП4-Т – с сигналами от температурных преобразователей: термометров сопротивления и термоэлектрических термометров; РП4-П – с сигналами от пропорциональных преобразователей: дифференциально-трансформаторных, потенциометрических и др. Совместно с электрическими исполнительными механизмами постоянной скорости регуляторы могут работать по П- или ПИ-законам, а при использовании электронных дифференциаторов – также по ПДили ПИД-законам.
Регуляторы модификации РП4-У имеют три независимых входа, что позволяет их использовать как для регулирования одного параметра, так и для регулирования соотношения между двумя параметрами, а также вводить через один из входов сигнал жесткой обратной связи либо сигнал от дифференциатора.
7
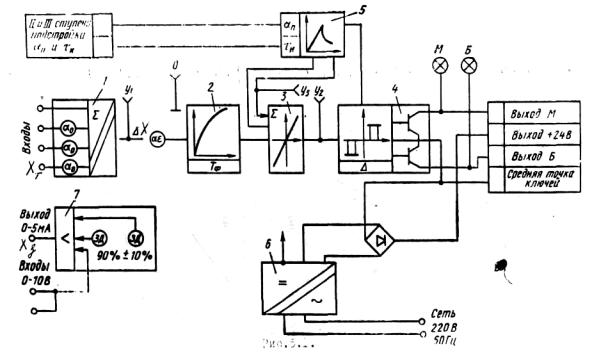
5. Принцип действия и конструкция регулятора На рис. 5.1. приведена функциональная схема регулятора, которая содержит:
входную часть 1 (устройство формирования сигнала ошибки), демпфер 2, операционный усилитель-сумматор 3, трехпозиционный нуль-орган 4, модуль упругой обратной связи 5, источник питания 6 и внутренний задатчик 7. К регулятору можно подключить внешний задатчик (на рис. 5.1. не показан).
Рисунок 5.1 – Функциональная схема регулятора РП4-У
Сигналы регулируемого параметра и задания поступают на масштабирующие устройства 0 входной части, в которой происходит их алгебраическое суммирование и формируется сигнал ошибки x. Последний через масштабируюшee устройство поступает на демпфер 2, представляющий собой апериодическое звено с регулируемой постоянной времени демпфирования Тф. После демпфирования сигнал подается на усилитель 3, и после усиления – на вход нуль-органа 4, имеющего регулируемую зону нечувствительности . При сигнале ошибки, превышающем порог срабатывания нуль-органа, последний открывается и скачком подает сигнал на выход "М" ("меньше") или "Б" ("больше") в зависимости от знака сигнала ошибки.
Лампочки "М" или "Б", подключенные к выходным ключам нуль-органа, сигнализируют о прохождении сигнала в цепь внешней нагрузки. С выхода нульоргана сигнал поступает и в цепь отрицательной упругой обратной связи, представляющей собой инерционное RC-звено. Сигнал обратной связи на выходе модуля 5 начинает плавно увеличиваться и компенсировать сигнал ошибки, что, в итоге, приведет к уменьшению сигнала на входе нуль-органа: нуль-орган отключается, как только сигнал на его входе достигнет порога отпускания. При этом сигналы на выходе регулятора и на входе модуля обратной связи скачком уменьшается до нуля; с этого момента сигнал обратной связи на выходе модуля 5
8
начинает плавно понижаться, а сигнал на входе нуль-органа снова возрастает до порога его срабатывания (следует помнить, что повторное и последующие срабатывания нуль-органа будут происходить при наличии сигнала ошибки на выходе входной части 1). Срабатывание нуль-органа снова приведет к появлению сигнала на выходе регулятора и на входе модуля 5.
Таким образом, регулятор нормирует на своем выходе импульсы, чередующимися паузами: длительность первого импульса пропорциональна сигналу ошибки и зависит от коэффициента передачи инерционного звена модуля 5; длительность последующих импульсов формируется интегральной частью регулятора, которая характеризуется величиной постоянной времени интегрирования модуля 5. Коэффициент передачи n и время интегрирования и (время удвоения) можно изменять переменными резисторами (изменение значения резисторов приводит к изменению постоянных времени заряда и разряда емкости RC-звена модуля 5). Для контроля работы регулятора служат контрольные гнезда
(O, Y1, Y2 и Y3).
Питание всех блоков и модулей регулятора осуществляется от источника питания 6.
Регуляторы модификаций РП4-Т и РП4-П отличаются от РП4-У схемной реализацией входной части 1 и устройства задания 7.
Принцип работы ПИ-регулятора наглядно можно проиллюстрировать графиками прохождения сигналов в основных цепях регулятора. Характер изменения этих сигналов показан на рис. 5.2. (a – сигнал ошибки; б – сигнал на выходе регулятора; в – кривая разгона регулятора, перемещение регулирующего органа; г – сигнал на входе модуля упругой обратной связи; д – сигнал на входе формирующей части регулятора, с учетом сигнала упругой обратной связи).
При ступенчатом изменении сигнала ошибки на входе формирующей части регулятора появится пропорциональное ему напряжение, которое вызовет срабатывание нуль-органа регулятора, и на его выходе появится ступенчатый сигнал xвых, под действием которого исполнительный механизм начнет перемещаться с постоянной скоростью, отрабатывая пропорциональную составлявшую управляющего воздействия y (см. интервал времени 0 1); к моменту 1, регулирующий орган займет положение y1. Одновременно сигнал с выхода регулятора будет поступать на вход модуля обратной связи и конденсатор RС-звена модуля начнет заряжаться (рис. 5.2., г), а разностный сигнал (рис. 5.2., д) на входе регулятора начнет уменьшаться. В момент времени 1 этот сигнал достигнет значения xотп (напряжения, при котором происходит отключение нульоргана) и сигнал на выходе регулятора скачком (рис.5.2., б) упадет до нуля.
С момента 1 конденсатор RС-звена модуля обратной связи начнет разряжаться (xос уменьшается, рис. 5.2., г), следовательно, сигнал х - xос начнет возрастать, т.к. к моменту = 2 сигнал ошибки (см. рис.5.2., а) не стал равным нулю. Как только х - xос достигнет порога срабатывания нуль-органа (значения xср при = 2) последний включится, и на выходе регулятора появится импульс, длительность которого 3- 2 определяется временем разряда RC-звена модуля обратной связи (временем изодрома). За время этого импульса регулирующий
9
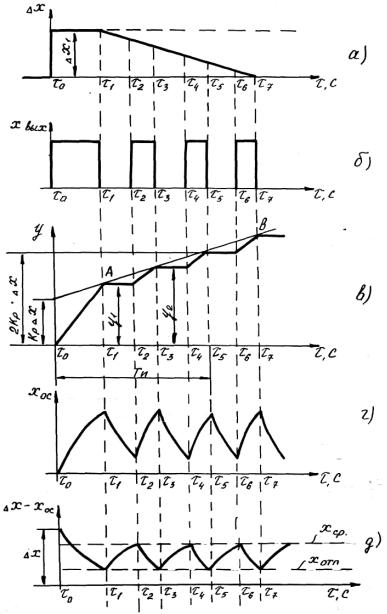
орган переместится в новое положение у2: регулятор начнет отрабатывать интегральную составляющую управляющего воздействия. С момента времени 2 появления импульса конденсатор RC-звена снова начнет заряжаться, а сигналх - xос – уменьшаться. Циклическое включение интегральной части регулятора будет продолжаться до тех пор, пока сигнал ошибки не стане равным нулю (до момента времени 7 рис. 5.2., а).
Рисунок 5.2 – Графики прохождения сигналов
По кривой разгона регулятора можно определить его настройки: Кр и Ти
(рис. 5.2.,б).
Принципиальные электрические схемы входной и формирующей частей регулятора РП4-У приведены на рис. 5.3 и 5.4 соответственно, а внутреннего задатчика – на рис. 5.5.
10