

33. Вращающееся магнитное поле ротора асинхронного двигателя
Обмотка
короткозамкнутого провода состоит из
m-частей.
Сдвиг фаз между ЭДС индуктивного
вращающего магнитным полем статора в
двух соседних стержнях, равен
![]()
р – число пар полюсов двигателя;
N – число стержней;
Можно считать, что число фаз короткозамкнутого ротора равно числу стержней m2=N. Цепь фазного ротора представляет трехфазную систему m2=3.
![]() 2
– число витков в каждой фазе.
2
– число витков в каждой фазе.
Пусть цепь ротора разомкнута, т.е. ток в ней отсутствует, на ротор не действуют электромагнитные силы и он неподвижен. При неподвижности ротора, частота ЭДС индуктированной в его обмотке, равна частоте токов в цепи обмоток статора.
f – частота сети, 50 Гц;
Если ротор вращать с частотой n2, вслед за вращающимся магнитным полем статора, то частота ЭДС индуктированной обмотки уменьшится и станет равной
Если цепь ротора замкнуть, то токи в ней образуют:
1) Многофазную систему, с числом фаз m2=N, в случае короткозамкнутого ротора.
2) Трехфазную систему, с числом фаз m2=3, в случае фазного ротора => токи в обмотке ротора аналогичны токам в обмотках статора, должны возбуждать вращающееся магнитное поле.
34. Рабочее вращающееся магнитное поле асинхронного двигателя
nотн. – частота вращения этого поля, относительно ротора.
![]()
Т.к. сам ротор вращается в том же направлении с частотой n2, то его поле вращается в пространстве с частотой, равной
![]()
Т.е. поле ротора вращается синхронно с полем статора, это является характерным условием полной передачи энергии от статора к ротору.
Складываясь, вращающееся магнитное поле статора и ротора, образуют рабочее вращающееся магнитное поле асинхронного двигателя, которое служит таким же связующим звеном, между обмотками статора и ротора, как и переменное магнитное поле в сердечнике трансформатора, передающее энергию от первичной обмотки ко вторичной обмотке. Именно это, рабочее поле, необходимо знать для анализа процессов в цепях статора и ротора.
35. Механическая характеристика асинхронного двигателя
Для устойчивой работы двигателя, важно, чтобы автоматически установилось равновесие вращающего и тормозного моментов, с увеличением нагрузки на валу двигателя, увеличится тормозной момент, соответственно должен возрастать и вращающий момент
![]()
Рмех – механическая мощность на вал двигателя;
![]() 2
– угловая скорость ротора
2
– угловая скорость ротора
![]()
Это уравновешивание моментов у работающего двигателя, осуществляется следующим образом, при увеличении нагрузки на валу, тормозной момент оказывается больше вращающего момента, в следствии чего, частота вращения ротора уменьшается , скольжение вырастает. Повышение скольжения вызывает увеличение вращающего момента. Равновесие моментов восстанавливается при возрастании скольжения.

![]()
R2 – активное сопротивление;
Xрас.2 – индуктивное рассеянное сопротивление.
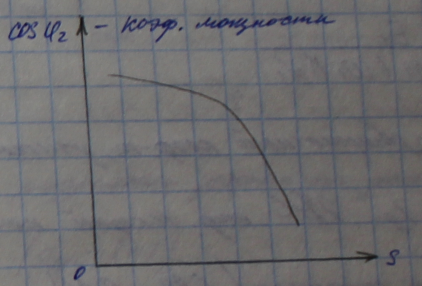
![]()
![]()
![]() –коэффициент
мощности.
–коэффициент
мощности.
36) Устройство и принцип действия, области применения электрических машин постоянного тока(мпт)
МПТ состоит из неподвижной части, в которой возбуждается главное магнитное поле, и вращающейся части, в которой индуктируется э.д.с. Токи от этой э.д.с., взаимодействуя с главным магнитным полем, создают момент (в двигательном режиме он является вращающим, в генераторном – тормозным).
Неподвижная часть состоит из станины и полюсов, которые к ней крепятся. Полюса подразделяются на главные, в которых возбуждаются основной магнитный поток, и добавочные, которые устанавливаются в целях улучшения коммутации машины.

Принцип действия
Машина постоянного тока может работать в двух режимах: двигательном и генераторном, в зависимости от того, какую энергию к ней подвести — если электрическую, то электрическая машина будет работать в режиме электродвигателя, а если механическую — то будет работать в режиме генератора. Однако электрические машины, как правило, предназначены заводом изготовителем для одного определенного режима работы — или в режиме генератора, или электродвигателя.
Область применения
Электрические Машины постоянного тока используют как в качестве генератора, так и вкачестве двигателя. Наибольшее применение получили двигатели постоянного тока:
- Они широко используются для привода подъёмных средств в качестве крановых двигателей.
- Приводом транспортных средств в качестве тяговых двигателей.
- Для привода устройств автоматики.
- Для привода прокатных станов.
- Для привода штатных подъёмников.