

1 Теоретическая часть
Большинство современных тяговых двигателей постоянного тока имеет последовательное (сериесное) возбуждение по следующим причинам:
- при увеличении тягового усилия до максимального значения двигатель с параллельным возбуждением потребляет значительно больший ток, чем двигатель с последовательным возбуждением. Поэтому он должен быть взят большим по тепловой мощности, т.е. большего габарита, а сеть и подстанции должны быть рассчитаны на большие потребляемые мощности;
- двигатель с последовательным возбуждением имеет так называемую «автоматическую» характеристику нагрузки, в то время, как двигатель с параллельным возбуждением требует регулирования возбуждения для изменения скорости;
- скоростные характеристики двигателей, работающих на одном экипаже, не могут быть идентичными. Допускается отклонение скорости вращения отдельных машин от номинальной до 4%. При этом расхождение в нагрузках двигателей с параллельным возбуждением оказывается недопустимо большим, в то время как при последовательном возбуждении разница в токах двигателей незначительна;
- из-за медленного возрастания магнитного поля двигателя с параллельным возбуждением при включении он хуже переносит переходные процессы;
- габаритные размеры катушек параллельного возбуждения в двигателе больше, чем последовательного.
Однако последовательное возбуждение тяговых двигателей имеет существенный недостаток – для него невозможен переход на генераторный рекуперативный режим из-за отсутствия у двигателя скорости идеального холостого хода, поэтому при любых скоростях ЭДС двигателя не может быть больше приложенного напряжения. Для осуществления рекуперации энергии при торможении на экипаже необходимо иметь специальный источник для независимого питания обмоток возбуждения в данном режиме.
В двигателе постоянного тока последовательного возбуждения ток якоря Iя является током возбуждения Iв. С изменением нагрузки на валу меняются ток якоря и магнитный поток, что вызывает изменение частоты вращения:
 ,
,
где U – напряжение питания двигателя;
Ф – магнитный поток полюса;
СЕ – конструктивная постоянная ЭДС;
Rяц = Rя + Rв – сопротивление якорной цепи;
Rя , Rв – соответственно сопротивление якоря и обмотки возбуждения.
С увеличением нагрузки возрастает ток Iя, увеличивается падение напряжения якорной цепи Rяц, но одновременно увеличивается и магнитный поток Ф. Поэтому частота вращения n будет снижаться с ростом потока Ф в большей степени по сравнению с частотой вращения двигателя независимого или параллельного возбуждения. У двигателя последовательного возбуждения механическая характеристика имеет сильно выраженную нелинейность и больший наклон, т.е. является «мягкой». По мере насыщения магнитной системы двигателя «жесткость» характеристики возрастает, и гипербола переходит в наклонную прямую.
Моментная характеристики двигателя последовательного возбуждения имеет два участка: при небольших токах якоря поток Ф полюса пропорционален току якоря Iя, а момент – квадрату этого тока, т.е. момент изменяется по параболе, что создает большой пусковой момент; с увеличением тока Iя магнитная система насыщается, поток Ф ≈ const, и парабола переходит в прямую М = СмIяФ.
Отличительной особенностью двигателя последовательного возбуждения является то, что его нельзя запускать без нагрузки, т.е. при Мс→ 0. В этом случае частота вращения якоря превышает допустимую, двигатель «идет вразнос». Поэтому нагрузка на двигатель должна составлять не менее 25% от номинальной.
Зависимость между током якоря Iя и магнитным потоком полюса Ф нелинейна, поэтому аналитически ее выразить сложно. В каталогах приводятся универсальные характеристики намагничивания для каждой серии машин в относительных единицах. В них за базовые величины приняты номинальные параметры. Такая зависимость представлена в табл.1. При нулевом токе якоря магнитный поток двигателя составляет около 2% от номинального значения, что объясняется остаточным намагничиванием стали магнитопровода.
Таблица 1 – Характеристика намагничивания двигателя
|
Iя* |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1,0 |
1,2 |
1,6 |
|
Ф* |
0,02 |
0,42 |
0,66 |
0,80 |
0,92 |
1,00 |
1,07 |
1,20 |
В работе требуется:
Построить зависимость тока якоря от вращающего момента, развиваемого двигателем М(Iя).
Рассчитать и построить естественную механическую характеристику двигателя.
Определить сопротивление регулировочного реостата в цепи якоря двигателя, обеспечивающего заданное снижение скорости двигателя при номинальном моменте. Построить искусственную механическую характеристику при реостатном регулировании скорости. Определить сопротивление реостата, при котором скорость двигателя равна нулю.
Построить искусственную механическую характеристику двигателя при шунтировании обмотки возбуждения.
Построить механические характеристики тормозного режима.
Определить диапазон и плавность регулирования скорости, оценить точность поддержания скорости двигателя.
Пример расчета представлен для двигателя, имеющего следующие паспортные данные:
Номинальная мощность двигателя Рн = 12,5 кВт;
Номинальная частота вращения n = 630 об/мин;
КПД двигателя в номинальном режиме ηн = 0,79;
Суммарное сопротивление якорной цепи, включающее сопротивления обмотки якоря и обмотки возбуждения Rяц = 0,4 Ом;
Коэффициент снижения частоты вращения к = 0,5;
Коэффициент шунтирования, характеризующий ослабление магнитного поля машины m = 2,0.
Построение зависимости тока якоря от вращающего момента
Ток якоря определяется моментом на валу:
![]() ,
(1)
,
(1)
где См – конструктивная постоянная момента;
Ф – поток полюса двигателя.
В номинальном режиме:
 . (2)
. (2)
Взяв отношение (1) к (2), получаем:
 или
или
 .
.
Переходим к относительным единицам: Iя* · Ф* = М* ,
где
 ,
,
![]() ,
,
![]() .
.
По таблице 1 строим кривую намагничивания Ф*(Iя*) (рисунок 1).

Рисунок 1 – Кривая намагничивания двигателя
Задаваясь значениями Iя* по кривой намагничивания находим значения Ф* и рассчитываем произведения этих величин Iя*·Ф*, которое равно относительному значению момента двигателя М*.
Например, Iя* = 0,2 Ф* = 0,42, М* = 0,2·0,42 = 0,08.
Результаты вычислений заносим в таблицу 2, значения первой и второй строк которой повторяют значения кривой намагничивания.
Таблица 2 – Моментная характеристика двигателя
|
1 |
Iя* |
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1,0 |
1,2 |
1,4 |
|
2 |
Ф* |
0,02 |
0,42 |
0,66 |
0,80 |
0,92 |
1,00 |
1,07 |
1,18 |
|
3 |
М* |
0 |
0,08 |
|
|
|
|
|
|
По данным таблицы 2 строим моментную характеристику двигателя Iя*(М*) в относительных единицах (рисунок 2).
Номинальный момент двигателя:
 ,
,
где Рн – номинальная мощность двигателя, кВт.
Ток якоря в номинальном режиме:

Для рассматриваемого двигателя:
![]() = 189 Н·м,
= 189 Н·м,
![]() =
72 А.
=
72 А.
Переход от относительных единиц к текущим абсолютным единицам осуществляют с помощью выражений: Iя = Iя*· Iя,н , М = М* · Мн .

Рисунок 2 – Моментная характеристика двигателя
Построение естественной характеристики двигателя
Естественную характеристику двигателя получают при отсутствии резисторов в якорной цепи и номинальных значениях напряжения и магнитного потока двигателя.
Скорость двигателя при номинальной нагрузке определяется из выражения электромеханической характеристики:

Частота вращения двигателя при нагрузке, отличной от номинальной:
 (3)
(3)
Считая, что Ен
= СЕ·Фн·
nн
или СЕ·Фн
=![]() ,
из выражения (3) получим:
,
из выражения (3) получим:
 или
или
 (4)
(4)
Для рассматриваемого двигателя Rяц · Iя,н = 0,4 · 72 = 28,8 В, номинальная ЭДС двигателя Ен = Uн - Rяц · Iя,н = 220 – 28,8 = 191,2 В. Тогда выражение (4) имеет вид:
 .
(5)
.
(5)
Задаваясь значениями М* от 0,25 до 1,6 , по моментной кривой Iя*(М*) определяем значения тока Iя* и по кривой намагничивания Ф*( Iя*) находим значения потока Ф*. Далее по формуле (5) рассчитываем значения скорости n*..
Например, М* = 0,25 , Iя,н = 0,39 , Ф* = 0,65 , n* = 1,70.
Результаты расчета заносим в таблицу 3, оставляя незаполненной пятую строку. По результатам расчета строим естественную механическую характеристику двигателя n*( М*) в относительных единицах (рисунок 3, кривая 1).
Таблица 3 – Результаты расчета естественной и искусственной механических характеристик
|
1 |
М* |
0,25 |
0,4 |
0,6 |
0,8 |
1,0 |
1,2 |
1,6 |
|
2 |
Iя* |
0,39 |
|
|
|
|
|
|
|
3 |
Ф* |
0,65 |
|
|
|
|
|
|
|
4 |
n* |
1,70 |
|
|
|
|
|
|
|
5 |
nI* |
1,40 |
|
|
|
|
|
|
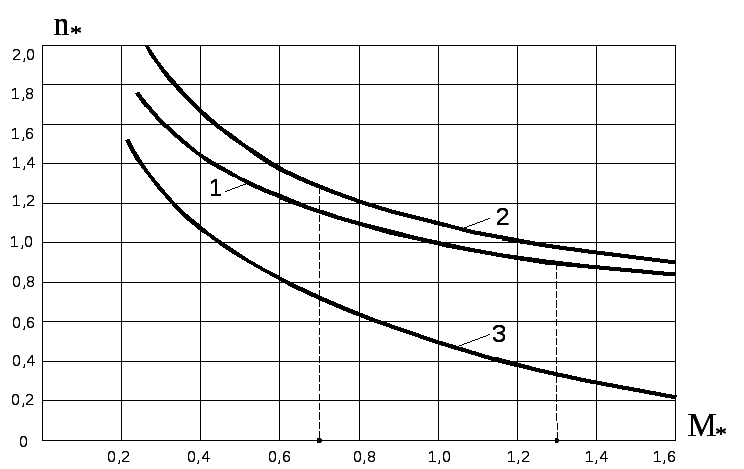
Рисунок 3 – Механические характеристики двигателя: 1 – естественная; 2 – при реостатном регулировании скорости; 3 - при полюсном регулировании скорости