Момент импульса тела относительно оси вращения
Пусть
тело вращается вокруг некоторой оси
ОО с угловой скоростью .
Разобьем это тело мысленно на элементарные
участки с массами m1,
m2,...mi,...,
которые находятся от оси соответственно
на расстояниях r1,
r2,...,
r3,
...,
![]() и
вращаются по окружностям, имея линейные
скоростиv1,
v2,
..., vi,
... Известно, что величина, равная
и
вращаются по окружностям, имея линейные
скоростиv1,
v2,
..., vi,
... Известно, что величина, равная
![]() - есть импульсi-
го участка. Моментом
импульса i-
го участка (материальной точки)
относительно оси вращения называется
вектор (точнее, псевдовектор)
- есть импульсi-
го участка. Моментом
импульса i-
го участка (материальной точки)
относительно оси вращения называется
вектор (точнее, псевдовектор)
![]() ,
(2.8)
,
(2.8)
где
![]() -
радиус-вектор, определяющий положениеi-го
участка относительно оси.
-
радиус-вектор, определяющий положениеi-го
участка относительно оси.
Моментом
импульса всего тела относительно оси
вращения называют вектор:
![]()
m1 m2 mi Li
O
O Рис.
2.3











![]()
![]()


![]() ,
(2.9)
,
(2.9)
модуль
которого
![]() .
.
В
соответствии с выражениями (2.8) и (2.9)
векторы
![]() и
и![]() направлены по оси вращения (рис.2.3). Легко
показать, чтомомент
импульса тела
направлены по оси вращения (рис.2.3). Легко
показать, чтомомент
импульса тела
![]() относительно оси вращения и момент
инерции I
этого тела относительно той же оси
связаны соотношением
относительно оси вращения и момент
инерции I
этого тела относительно той же оси
связаны соотношением
![]() .
(2.10)
.
(2.10)
Основной закон динамики для вращательного движения
В случае, если момент инерции тела в процессе вращения остается постоянным, “Основной закон...” читается так: момент силы (или результирующий момент сил, если их несколько), действующий на тело относительно оси вращения, равен произведению момента инерции тела относительно этой оси на угловое ускорение, с которым вращается тело:
![]() .
(2.11)
.
(2.11)
Описание установки и метода определения момента инерции
Маятник Обербека представляет собой крестовину, состоящую из втулки 1, четырех спиц 2, укрепленных на одном из концов втулки. На спицах размещены грузы 3. Последние могут перемещаться вдоль спиц и закрепляться на них с помощью винтов. Другой конец втулки выполнен в виде шкива 4 , на который наматывается нить-шнур. К свободному концу шнура привязан груз 5. Под влиянием этого груза маятник приходит в ускоренное вращательное движение вокруг неподвижной оси. Трение между втулкой маятника и осью практически сведено к нулю установленными на ось подшипниками. Для установки груза 5 на определенной высоте предусмотрен указатель 6. Исходным уравнением для определения момента инерции I маятника является уравнение (2.11), из которого следует, что
![]() ,
(2.12)
,
(2.12)
г деM
- вращающий момент, в данном случае -
момент силы Т натяжения шнура, приложенной
в точке k (рис.2.4);
деM
- вращающий момент, в данном случае -
момент силы Т натяжения шнура, приложенной
в точке k (рис.2.4);
![]() - угловое ускорение маятника. Момент
силы берется относительно
оси вращения, а потому
- угловое ускорение маятника. Момент
силы берется относительно
оси вращения, а потому
М = T R, (2.13)
где R - радиус шкива.
Сила Tможет быть найдена из второго закона Ньютона. записанного для груза 5:
ma = mg - T,
где m - масса груза 5; а - ускорение, с которым он опускается, откуда
Т = m (g - а). (2.14)
Таким образом, подставляя (2.14) в (2.13), получим
М = m(g - a) R. (2.15)
Угловое
ускорение
связано с тангенциальным ускорением
![]() точек на ободе колеса следующим
соотношением:
точек на ободе колеса следующим
соотношением:
![]() .
.
В
свою очередь,
![]() совпадает с ускорениема,
с которым опускается груз 5. Следовательно,
совпадает с ускорениема,
с которым опускается груз 5. Следовательно,
![]() .
(2.16)
.
(2.16)
Ускорение а можно вычислить, если измерить время t опускания груза 5 на определенную высоту h. Действительно
![]() ,
,
а потому
![]() .
(2.17)
.
(2.17)
Подставляя (2.17) в (2.16) и (2.15), а затем в (2.12), получим
![]() ,
(2.18)
,
(2.18)
где d = 2 R - диаметр шкива.
Заметим, однако, что второе слагаемое в выражении (2.18) оказывается на практике значительно меньше первого, а потому момент инерции маятника можно вычислить как
![]() .
(2.19)
.
(2.19)
Формула (2.19) - рабочая формула для определения I из законов динамики. С другой стороны, как уже отмечалось, момент инерции тела - величина аддитивная. Следовательно, момент инерции маятника Обербека относительно оси вращения можно представить в виде
I = Iв + Iш + 2Iсп + 4Iгр , (2.20)
где: Iв- момент инерции втулки; Iш - момент инерции шкива; Iсп- момент инерции спицы; I гр - момент инерции одного груза 3. (Разумеется, все эти моменты инерции в данном случае берутся тоже относительно оси вращения.)
Так
как
![]() ,
,
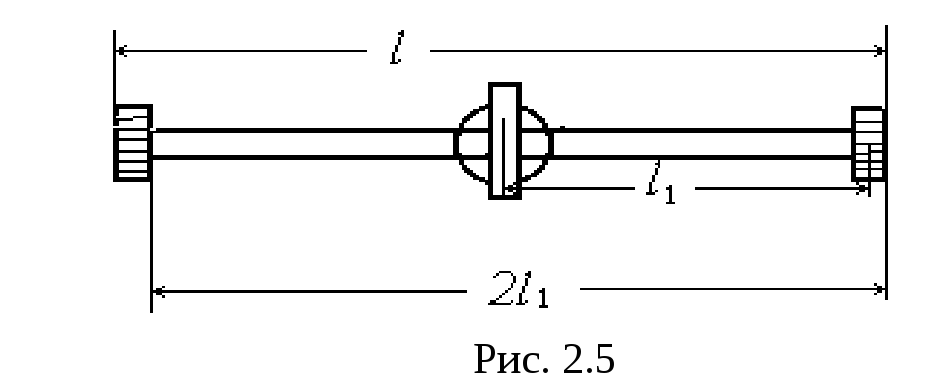
где l и mпс- общая длина (рис.2.5) и масса двух спиц, а для случая, когда грузы 3 находятся на концах спиц,
Iгр = mгрl12
(груз - материальная точка), где l1- расстояние от центра масс груза до оси, а mгр - масса груза 3, то
I = (Iв + Iш) + 1/6 mпс l2 + 4 mгр l12. (2.21)