

Методичка по ТАУ
.pdfЛабораторная работа №1
ДИНАМИЧЕСКИЕ ЗВЕНЬЯ И ИХ ХАРАКТЕРИСТИКИ ВО ВРЕМЕННОЙ ОБЛАСТИ
1. Типовые передаточные функции
Рассмотрим систему автоматического управления (САУ), описываемую линейным дифференциальным уравнением вида:
|
d |
n |
y(t) |
|
|
d |
n 1 |
y(t) |
|
|
dy(t) |
|
||||
a |
|
a |
|
... a |
a y(t) |
|||||||||||
n |
|
|
n |
|
|
|
|
n 1 |
|
|
||||||
|
dt |
|
|
|
n 1 |
|
dt |
|
|
1 |
dt |
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
d |
m |
u(t) |
|
|
d |
m 1 |
|
|
du(t) |
|
||||
b |
|
b |
|
|
u(t) |
...b |
b u(t) |
|||||||||
|
|
|
|
m |
|
|
|
|
m 1 |
|
||||||
|
m |
|
|
dt |
|
m 1 |
dt |
1 |
dt |
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(1)
где u(t) – входной процесс; y(t) – выходной процесс; ai, bj, – постоянные коэффициенты; n, m (n ≥ m) – постоянные числа.
Если ввести обозначение p для оператора дифференцирования |
p |
d |
, |
|
dt |
||||
|
|
|
||
то можно записать (1) в операторной форме: |
|
|
|
(a p |
n |
a |
|
p |
n 1 |
... a p a |
) y(t) |
||
|
n 1 |
|
|||||||
n |
|
|
|
|
1 |
0 |
|
|
|
откуда получается: |
|
|
|
|
|
||||
|
|
|
|
|
|
|
y(t) |
|
B( p) |
|
|
|
|
|
|
|
u(t) |
A( p) |
|
|
|
|
|
|
|
|
|
||
(b |
m |
p |
|
W (
m
p
b |
m 1 |
p |
m 1 |
...b p b )u(t) |
|
|
|
||||
|
|
|
|
1 |
0 |
) ,
(2)
где A(p) и B(p) – полиномы из формулы (2).
Выражение (2) по виду совпадает с определением передаточной функции (ПФ), как отношения преобразования по Лапласу выходной переменной к преобразованию по Лапласу входной переменной при нулевых начальных условиях:
y(s) |
|
B(s) |
W (s) |
(3) |
|
u(s) |
A(s) |
||||
|
|
|
где s – комплексная переменная.
Комплексные числа, являющиеся корнями многочлена B(s),
называются нулями передаточной функции, а корни многочлена A(s) –
полюсами.
Зная нули и полюса системы, можно получить ее описание в виде
W (s) |
K (s n )(s n |
|
)...(s n |
|
) |
||
1 |
2 |
m |
|
||||
(s p )(s p |
)...(s p |
) |
|||||
|
|||||||
|
1 |
2 |
|
n |
|
|
|
(4)
где ni и pi – нули и полюса системы, К – обобщенный коэффициент передачи.
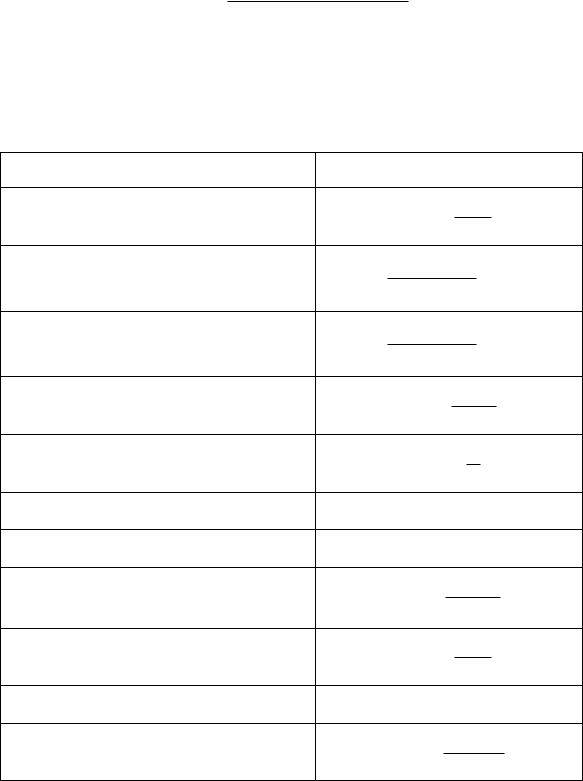
Описание типовых динамических звеньев приведено в табл. 1.
Таблица 1 – Типовые динамические звенья
№ |
Название звена |
|
1 |
Апериодическое 1-го порядка |
|
(инерционное) |
||
|
||
2 |
Апериодическое 2-го порядка |
|
(все корни вещественные) |
||
|
||
3 |
Колебательное |
|
4 |
Консервативное |
|
5 |
Интегрирующее |
|
6 |
Дифференцирующее |
|
7 |
Усилительное (безынерционное) |
|
8 |
Интегрирующее с запаздыванием |
|
(реальное интегрирующее) |
||
|
||
9 |
Дифференцирующее с запаздыванием |
|
(реальное дифференцирующее) |
||
|
||
10 |
Форсирующее |
|
11 |
Изодромное |
|
|
|
ПФ звена
|
W (s) |
|
K |
|
|
||||
|
Ts 1 |
|
|
||||||
|
|
|
|
|
|
|
|||
W (s) |
|
|
|
K |
|
|
; |
T 2T |
|
2 |
|
2 |
|
|
|
||||
T |
s |
T s 1 |
|
1 |
2 |
||||
|
|
|
|
|
|||||
2 |
|
|
1 |
|
|
|
|
|
|
W (s) |
|
|
|
K |
|
|
; |
T 2T |
|
2 |
|
2 |
|
|
|
||||
T |
s |
T s 1 |
|
1 |
2 |
||||
|
|
|
|
|
|||||
2 |
|
|
1 |
|
|
|
|
|
|
|
W (s) |
|
K |
|
|
||||
|
Ts |
2 |
1 |
|
|
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
W (s) |
K |
|
|
|||
|
|
|
s |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
W (s) Ks |
|
|
||||
|
|
|
W (s) K |
|
|
||||
W (s) |
|
K |
|
|
|||||
|
|
1) |
|
|
|||||
|
|
|
|
s(Ts |
|
|
|||
W (s) Ks
Ts 1
W (s) K(Ts 1)
W (s) K (Ts 1)
s
Временные характеристики динамического звена представляют собой зависимость выходного сигнала системы от времени при подаче на ее вход некоторого типового воздействия. Обычно выполняется анализ выхода

системы на единичный скачок (функция Хевисайда) и импульсную функцию
(функция Дирака или -функция).
Единичный скачок 1(t) определяется условиями:
|
|
t 0 |
0, |
при |
|
|
|
|
1(t) |
|
|
|
при |
t 0 |
1, |
||
|
|
|
Реакция САУ на единичный скачок называется переходной функцией системы и обозначается h(t). При неединичном ступенчатом воздействии g(t)=N1(t), где N=const, в соответствии с принципом суперпозиции выходная реакция системы будет
y(t) Nh(t) .
Импульсная функция (t) определяется условиями:
|
|
|
|
, |
при |
||
δ(t) |
|
|
|
|
0, |
при |
|
|
|||
|
|
||
t 0 |
. |
|
|
t 0 |
|
Очевидно:
δ(t)
1' (t)
.
Реакция САУ на импульсную функцию называется импульсной переходной функцией системы (функцией веса) и обозначается w(t).
Импульсная и переходная функции системы связаны соотношением:
h(t)
t
0
w(τ)dτ
.
2. Инерционное и колебательное звено
Апериодическое (инерционное) звено 1-го порядка имеет особое значение, потому что с его помощью можно описать многие реальные производственные и технологические процессы.
Рассмотрим простое инерционное звено
W (s) K . Ts 1
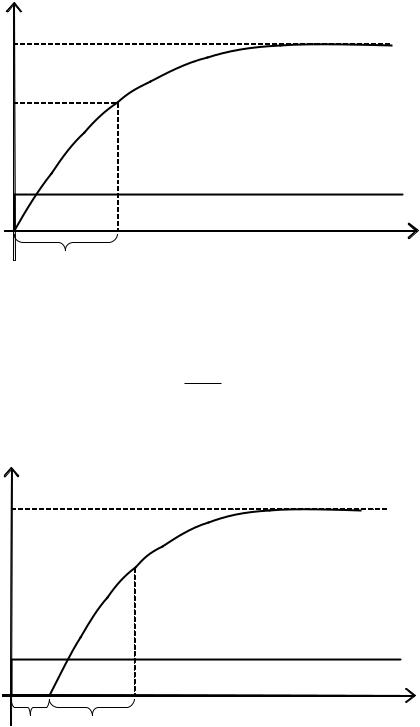
здесь K – коэффициент усиления, а T – постоянная времени звена. Эти параметры можно получить по переходной функции объекта (рис. 1).
K = y |
|
уст |
|
0.63y |
y(t) |
|
|
уст |
|
|
1(t) |
T |
t |
|
Рис. 1. Переходная функция апериодического звена
Инерционное звено с запаздыванием описывается формулой
W |
Ks |
e |
s |
. |
|
||||
Ts 1 |
|
|||
|
|
|
|
где – время запаздывания.
K = yуст
y(t)
0.63yуст 
1(t)
t
T
Рис. 2. Переходная функция апериодического звена с запаздыванием
Таким образом, для построения модели динамического объекта в виде инерционного звена надо подать на его вход единичный скачок, а затем снять переходную характеристику, вид которой должен соответствовать рис. 1
или 2.
Колебательное звено также может служить моделью для многих реальных процессов. Запишем ПФ колебательного звена в виде
W (s) |
|
|
|
K |
; |
T T |
, |
|
T |
|
|
|
|
1 |
|||||
|
|
|
|
|
|
|
|
|
|
T |
2 |
s |
2 |
2 Ts 1 |
|
2 |
|
|
2T |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2 |
.
или
W (s) |
|
|
|
K |
|
|
; |
T |
1 |
. |
|
|
|
2 |
|
|
0 |
||||
|
s |
|
s |
|
|
|
||||
2 |
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
n |
|
|
|
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
|
|
W ( p) K |
|
n |
|
; |
|
2 |
2 s |
2 |
|||
s |
|
||||
|
|
|
|||
|
|
n |
n |
|
(5)
где - коэффициент демпфирования, ωn – натуральная частота (частота при отсутствии затухания).
Пример. Дана ПФ колебательного звена:
1425
W (s) s2 20s 1500 .
Требуется записать ПФ в форме (5).
Решение.
|
2 |
1500 |
|
|
|
|
|
|
n |
|
|
|
n |
|
38.73
.
2 |
20 |
|
n |
|
|
Таким образом,
0.258
.
1425 |
|
|
n2 |
|
|
|
W (s) |
|
0.95 |
|
|
. |
|
s 2 20s 1500 |
s 2 |
2 s 2 |
||||
|
|
|
|
n |
n |
|
Полюса системы
p1,2 n n 
 2 1.
2 1.

В зависимости от значения коэффициента демпфирования меняется вид переходного процесса в системе.
На рис. 3 показан общий вид переходного процесса для колебательного звена при подаче на вход единичного ступенчатого воздействия.
Рис. 3. Переходный процесс колебательного звена
Кхарактеристикам переходного процесса относятся (рис. 3):
время пика tп, т.е. время, за которое переменная y(t) возрастает до максимального значения yмах(t),
время регулирования tпп (время от начала переходного процесса до момента, когда y(t) не покидает интервал yуст(t) ± :
y y |
уст |
, |
|
|
где = 1 – 5%.
перерегулирование:
 ymax yуст
ymax yуст  100%.
100%.
yуст
Величина перерегулирования колебательного звена зависит только от величины коэффициента демпфирования и может быть рассчитана по формуле
|
|
|
|
|
|
|
|
|
exp |
|
|
|
|
|
100%. |
||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||

Время пика зависит как от величины коэффициента демпфирования,
так и от собственной частоты и может быть найдена по формуле
t |
|
|
|
|
. |
пп |
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
n |
|
|
Можно сказать, что коэффициент демпфирования влияет на форму отклика, а собственная частота – на скорость отклика.
3.Использование пакета MatLab
Впакете MatLab имеется два основных варианта для исследования передаточных функций и моделирования САУ
Использование команд пакета расширения Control System Toolbox;
Использование пакета Simulink.
Control System Toolbox предназначен для работы с LTI-моделями
(Linear Time Invariant Models – линейные модели с постоянными параметрами) систем управления.
Команда, создающая LTI-систему c одним входом и одним выходом в виде передаточной функции, имеет следующий синтаксис:
TF([bm, …, b1 , b0 ], [an , …, a1 , a0 ]),
где bm, …, b1 , b0 и an , …, a1 , a0 значения коэффициентов полиномов В и A в
(3).
1)Например, если требуется описать ПФ вида
W
|
|
s 1 |
|
2s |
2 |
8s |
5 |
|
,
и узнать значения ее нулей и полюсов, то нужно ввести в окне команд
MatLab следующие команды (здесь и далее знак >> обозначает командную строку системы MatLab):
>>w=tf([1 1],[2 8 5])
>>zero(w)
>>pole(w)
Transfer function:
s + 1
---------------
2 s^2 + 8 s + 5 ans =
-1 ans =
-3.2247 -0.7753
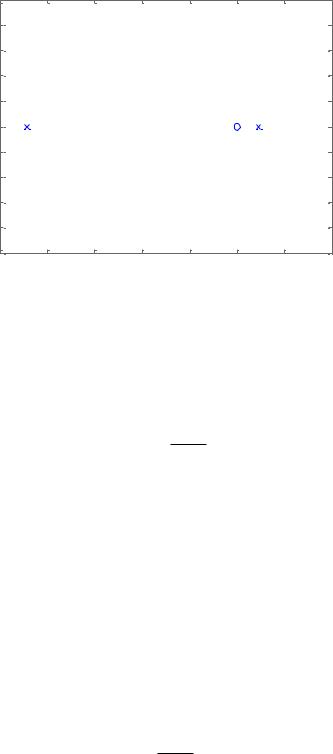
2) Графическое расположение нулей и полюсов можно получить с
помощью команды pzmap:
>> pzmap(w)
Результат приведен на рис. 4.
3) С помощью команды zpk можно получить альтернативное
описание ПФ по ее нулям и полюсам. Например
>> w=zpk([2 -1],[2 -4 1],3)
Zero/pole/gain: 3 (s-2) (s+1)
-----------------
(s-2) (s-1) (s+4)
4)Можно преобразовать ранее описанную ПФ в zpk-форму,
например
>>w=tf([1 1],[2 1 1])
>>w1=zpk(w)
Transfer function: s + 1
-------------
2 s^2 + s + 1
Zero/pole/gain: 0.5 (s+1)
------------------
(s^2 + 0.5s + 0.5)
Imaginary Axis
|
|
|
Pole-Zero Map |
|
|
|
|
1 |
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
-0.2 |
|
|
|
|
|
|
|
-0.4 |
|
|
|
|
|
|
|
-0.6 |
|
|
|
|
|
|
|
-0.8 |
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
-3.5 |
-3 |
-2.5 |
-2 |
-1.5 |
-1 |
-0.5 |
0 |
|
|
|
|
Real Axis |
|
|
|
Рис. 4. Нули и полюса на комплексной плоскости
5)Коэффициенты ПФ можно описывать как переменные MatLab,
например
W |
Ks |
. |
|
Ts 1 |
|||
|
|
>>K = 2; T = 4;
>>num = [K 0];
>>den = [T 1];
>>w = tf(num, den)
Transfer function: 2 s
-------
4 s + 1
6)Передаточная функция может содержать запаздывание
W |
Ks |
e |
T s |
. |
|
0 |
|||
|
|
|
|
|
|
Ts 1 |
|
|
|
>>T0 = 5;
>>wd = tf(num, den, 'InputDelay', T0)
Transfer function: 2 s
exp(-5*s) * -------
4 s + 1
7) Получить инерционное звено со случайными параметрами
можно, например, с помощью команд
>>k=5*rand(1,1);
>>T=10*rand(1,1);
>>w=tf(k,[T 1]) Transfer function:
2.109
-----------
9.157 s + 1
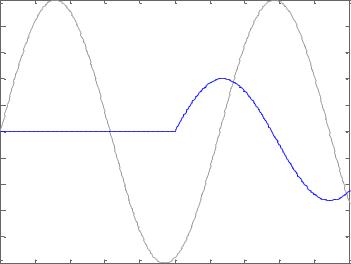
8)C помощью команды lsim можно промоделировать реакцию ПФ при подаче на вход заданного сигнала, например
>>t = 0 : 0.01 : 10;
>>x = sin(t);
>>lsim(wd,x,t)
Amplitude
Linear Simulation Results
1 |
|
|
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
-0.2 |
|
|
|
|
|
|
|
|
|
|
-0.4 |
|
|
|
|
|
|
|
|
|
|
-0.6 |
|
|
|
|
|
|
|
|
|
|
-0.8 |
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
Time (sec) |
|
|
|
|
|
Рис. 5. Моделирование реакции динамического звена
9) |
Исследовать реакцию LTI-модели на типовые входные |
воздействия можно с помощью команд:
>>step(w)
>>impulse(w)