

сборник_индив_заданий_кинематика
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.3 |
|||
№ |
x f1(t) |
|
y f2 (t) |
|
||||||||||||||||||
1 |
|
|
a |
|
|
|
|
|
|
|
cos(bt) cos(at) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
sin(at) cos(bt) |
|
|
b |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
0 |
|
|
|
|
|
|
|
|
|
a b(t 1)3 |
|
||||||||||
4 |
a cos t b |
bsin(2t) a |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
a (4 t)2 b |
|
|
|
|
|
|
|
|
at(t 4) |
|
|||||||||||
5 |
|
|
|
|
t 4 |
|||||||||||||||||
6 |
0.5ae2t 2 |
|
be 2t |
3 |
|
|||||||||||||||||
7 |
a cos t b |
|
|
|
|
|
|
|
|
at 4 |
|
|
|
|
|
|
||||||
|
|
t |
|
|
t |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
at3 bsin t |
|
||||||||
8 |
|
|
t 5 |
|
|
|
|
|
|
|
|
|||||||||||
9 |
b at2 |
|
|
|
|
|
|
|
a cos((a b)t) sin((a b)t) |
|
||||||||||||
10 |
a cos t bsin t |
|
a cos(2t) |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
11 |
|
|
at |
|
|
|
|
|
|
|
a(t5 sin(bt)) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
0 |
|
|
|
|
|
|
|
|
|
8 3 t 1 a t 1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 (b t)4 |
|
|||||||
13 |
1 a t 2 |
|
|
|||||||||||||||||||
14 |
a sin(2t) |
|
|
a |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
15 |
a(et e t ) |
|
b(et e t ) |
|
||||||||||||||||||
16 |
a cos(3t) |
bsin(t 2) a |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(at3 bt4 ) t2 |
|
||||||||
17 |
at2 bt 1 |
|
t 2 |
|
||||||||||||||||||
18 |
b a cos(at) |
a bsin(at) |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
19 |
|
ae 3t |
|
|
|
|
|
|
|
|
b a cos t |
|
||||||||||
20 |
a(ebt e bt ) |
sin(bt) sin(at) |
|
|||||||||||||||||||
21 |
a (t b)3 |
0 |
|
|
|
|
|
|
||||||||||||||
22 |
bsin(at) |
|
sin (at 2) |
|
||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||
|
(a(t 3)2 7) |
b(t 3)2 |
|
|
|
|
|
|
|
|
|
|
||||||||||
23 |
|
a t b |
|
|||||||||||||||||||
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
||||||

Окончание табл. 5.3
|
№ |
|
|
|
|
|
|
|
x f1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
y f2 (t) |
|
|
|
|
||||||||||||||||||||||||||||
|
24 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
at b |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
a |
t sin(bt) |
|
|
|
|
|
|
|
|
|
|
|
|
aet |
|
be t |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
aebt b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
26 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
at b |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
a sin(bt) bcos(at) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
27 |
|
|
|
|
|
|
|
|
|
|
a3 |
|
bt b |
at |
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
28 |
|
|
|
|
|
|
a cos2 (bt) |
|
|
|
|
|
|
|
|
|
|
|
|
bsin2 (at) |
|
|
|
|
||||||||||||||||||||||||||||||
|
29 |
|
|
|
|
|
|
at bt2 |
|
2 |
|
|
|
|
|
|
|
asin((a b)t) bcos(at) |
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
a(t 1)2 b(t 1) 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a t b3 t 2 |
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.4 |
||||||||||
№ |
|
vx |
|
t 0 |
|
x |
|
t 0 |
|
vy |
|
t 0 |
|
y |
|
t 0 |
|
|
№ |
|
|
vx |
|
t 0 |
|
|
x |
|
t 0 |
|
|
vy |
|
t 0 |
|
y |
|
t 0 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
1 |
|
0 |
3 |
|
|
|
–5 |
|
0 |
|
16 |
|
|
5 |
|
|
|
|
|
1 |
|
|
9 |
|
|
2 |
|
||||||||||||||||||||||||||||
2 |
|
|
–1 |
1 |
|
|
|
–3 |
|
–2 |
|
17 |
|
|
3 |
|
|
|
|
|
5 |
|
|
7 |
|
|
5 |
|
|||||||||||||||||||||||||||
3 |
|
4 |
4 |
|
|
|
1 |
|
1 |
|
18 |
|
|
6 |
|
|
|
|
|
1 |
|
|
1 |
|
|
6 |
|
||||||||||||||||||||||||||||
4 |
|
3 |
0 |
|
|
|
0 |
|
1 |
|
19 |
|
|
2 |
|
|
|
|
|
4 |
|
|
0 |
|
|
0 |
|
||||||||||||||||||||||||||||
5 |
|
|
–5 |
2 |
|
|
|
4 |
|
0 |
|
20 |
|
|
|
–7 |
|
|
|
|
3 |
|
|
1 |
|
|
8 |
|
|||||||||||||||||||||||||||
6 |
|
3 |
6 |
|
|
|
8 |
|
1 |
|
21 |
|
|
4 |
|
|
|
|
|
0 |
|
|
5 |
|
|
1 |
|
||||||||||||||||||||||||||||
7 |
|
4 |
2 |
|
|
|
1 |
|
7 |
|
22 |
|
|
7 |
|
|
|
|
|
9 |
|
|
1 |
|
|
5 |
|
||||||||||||||||||||||||||||
8 |
|
|
–1 |
0 |
|
|
|
3 |
|
0 |
|
23 |
|
|
5 |
|
|
|
|
|
8 |
|
|
2 |
|
|
4 |
|
|||||||||||||||||||||||||||
9 |
|
6 |
7 |
|
|
|
3 |
|
2 |
|
24 |
|
|
7 |
|
|
|
|
|
3 |
|
|
0 |
|
|
4 |
|
||||||||||||||||||||||||||||
10 |
|
1 |
6 |
|
|
|
9 |
|
7 |
|
25 |
|
|
8 |
|
|
|
|
|
15 |
|
|
0 |
|
|
–10 |
|||||||||||||||||||||||||||||
11 |
|
0 |
5 |
|
|
|
1 |
|
4 |
|
26 |
|
|
9 |
|
|
|
|
|
9 |
|
|
45 |
|
|
0 |
|
||||||||||||||||||||||||||||
12 |
|
1 |
0 |
|
|
|
5 |
|
2 |
|
27 |
|
|
0 |
|
|
|
|
|
14 |
|
|
0 |
|
|
16 |
|||||||||||||||||||||||||||||
13 |
|
1 |
7 |
|
|
|
8 |
|
1 |
|
28 |
|
|
34 |
|
|
|
|
|
0 |
|
|
89 |
|
|
0 |
|
||||||||||||||||||||||||||||
14 |
|
7 |
4 |
|
|
|
9 |
|
1 |
|
29 |
|
|
9 |
|
|
|
|
|
0 |
|
|
7 |
|
|
0 |
|
||||||||||||||||||||||||||||
15 |
|
3 |
8 |
|
|
|
3 |
|
5 |
|
30 |
|
|
1 |
|
|
|
|
|
0 |
|
|
0 |
|
|
–1 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.5 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
№ |
|
1 |
|
|
2 |
|
3 |
|
4 |
5 |
|
6 |
|
7 |
|
8 |
|
9 |
|
|
10 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
a |
3 |
–4 |
|
1 |
2 |
6 |
3 |
5 |
7 |
8 |
2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
b |
|
7 |
|
|
5 |
|
3 |
|
4 |
1 |
|
4 |
|
2 |
|
1 |
|
|
|
|
3 |
|
|
4 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

Пример 1 (прямая задача кинематики точки). Требуется решить задачу 1, если закон движения точки M задан в виде
r(t) 2t 2i (4t 4 3)j . |
(5.1) |
|
Решение. Согласно (5.1) точка движется в плоскости Oxy , и |
||
уравнения ее движения в координатной форме имеют вид |
|
|
x 2t 2 м, |
y 4t 4 3 м. |
(5.2) |
Исключая параметр t |
из уравнений (5.2), видим, что траекто- |
|
рия движения точки M лежит на параболе |
|
|
y x2 3 . |
(5.3) |
|
При этом траектория занимает не всю параболу (рис. 5.1), а |
||
только часть ее, соответствующую значениям x 0 |
(так как |
|
x 2t 2 0 ). Сначала точка M из бесконечности приходит в точку (0,3) в момент времени t 0 с, затем по тому же пути вновь удаляется на бесконечность.
Найдем проекции скорости и ускорения точки M на координатные оси Ox и Oy:
vx (t) x(t) 4t , vy (t) y(t) 16t3 , ax (t) x(t) 4 , ay (t) y(t) 48t 2 .
Для модулей скорости и ускорения точки M получим выражения v(t) 
 x2 y2
x2 y2 
 16t 2 (16t3 )2 ,
16t 2 (16t3 )2 ,
a(t) 
 x2 y2
x2 y2 
 16 48t2 2 .
16 48t2 2 .
Найдем теперь тангенциальное и нормальное ускорения точки M . Направим единичный вектор τ вдоль траектории в сторону увеличения координаты x (см. рис. 5.1), а единичный вектор нормали n – в сторону вогнутости параболической траектории. Тогда тангенциальное ускорение будет равно
a (t) a τ |
a v |
|
|
16t 768t5 |
||||
|
|
|
|
|
|
. |
||
|
|
|
|
|
|
|||
|
|
v |
|
|
16t 2 (16t3 )2 |
|||
|
|
|
|
|||||
Мы здесь учли, что вектор τ v / v , причем знак “+” следу-
ет выбирать для t 0 и знак “–” для t 0 . Нормальное ускорение вычислим по формуле
32

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
128t3 |
||||
|
|
a |
|
(t) a2 a2 |
|
|
|
|
|||||||||||||
|
|
n |
|
|
|
|
|
|
|
. |
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
16t 2 (16t3 )2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Найдем, наконец, радиус кривизны траектории в точке M |
|||||||||||||||||||||
|
|
(t) |
v2 (t) |
|
|
(16t 2 |
(16t3 )2 )3 2 |
. |
|||||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
a |
n |
(t) |
|
|
|
|
|
|
128t3 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Искомые величины при t 1 с будут равны |
|||||||||||||||||||||
xM (1) 2 |
м, yM (1) 7 м, xM (1) 4 м/с, yM (1) 4d 16 м/с, |
||||||||||||||||||||
x |
(1) 4 |
м/с2, |
y (1) 48 |
м/с2, a |
|
(1) 48.2 м/с2, |
|||||||||||||||
M |
|
|
|
M |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
a |
(1) 47.5 м/с2, a |
(1) 7.76 |
м/с2, |
M |
(1) 17.52 м. |
||||||||||||||||
M |
|
|
|
Mn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На рис. 5.1 схематично показана траектория движения точки, |
|||||||||||||||||||||
положение M1 |
точки при t 1 с на траектории, направление век- |
||||||||||||||||||||
тора скорости и векторов тангенциального и нормального ускорений точки в этот же момент времени.
M
Mn
M
M
1
Рис. 5.1
Пример 2 (обратная задача кинематики точки). Точка M движется в плоскости Oxy так, что проекции ее ускорения на оси Ox
33
и Oy равны соответственно a |
x |
2 sin( t / 2) |
, a |
y |
t м/с2. |
||||
|
|
|
|
|
|
|
|
||
Найти уравнения движения точки M, если ее начальная скорость |
|||||||||
при t 0 задана проекциями v0 x |
2 , v0 y 2 м/с, а начальное |
||||||||
положение определяется координатами x |
0 |
0 , |
y |
0 |
4 2 м (в мо- |
||||
|
|
|
|
|
|
|
|
||
мент времени t 0 ).
Решение. Сначала найдем проекции скорости точки M |
|||||
t |
t |
|
2 |
|
|
v x (t) v0 x ax ( )d 2 |
|
sin |
d |
||
0 |
0 |
|
|
2 |
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
2 |
|
|
|
|
|
|
|
cos |
|
|
|
|
|
2 cos |
|
t м/с, |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
0 |
|
|
|
2 |
|
|
|
|
|
||||||
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
v y (t) v0 y ay ( )d 2 d 2 2 |
|
2 t2 |
м/с. |
|||||||||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
2 |
0 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Положение |
|
|
|
|
|
|
точки |
|
M |
|
|
по |
найденным |
значениям |
||||||||||||||||||||
vx (t), vy (t) проекций ее скорости определится выражениями |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
||
x(t) x0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
v x ( )d 0 2 cos |
|
d |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
2 |
|
|
|
|
|
|
|
||
|
2 |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
2 |
|
sin |
|
|
|
|
|
|
4sin |
t , |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
0 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
0 |
|
|
|
t |
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
2 |
|
|
|
|
|||
y(t) y |
|
|
v |
( )d 4 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
2 |
|
2 |
d |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|||
4 2 (2 ) |
|
t |
|
|
|
3 |
|
t |
|
|
|
|
|
|
t3 |
м. |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
4 2 2 t |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, уравнения движения точки M имеют вид |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
y(t) 4 |
2 |
2 t |
t3 |
. |
|
||||||||||
|
|
|
|
|
x(t) 4sin |
|
, |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
||
34
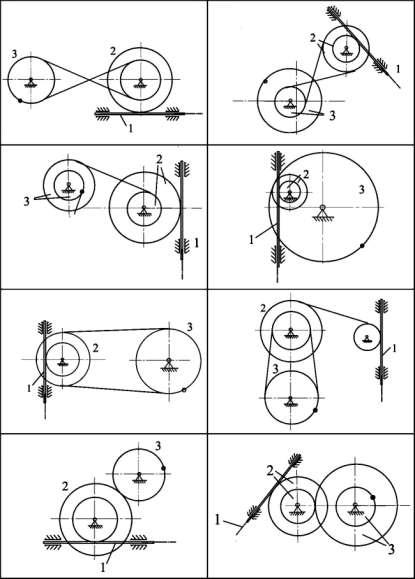
6. Задание 2. Поступательное и вращательное движения твердого тела
Определить скорость и ускорение точки М одного из колес механизма в момент времени t = t1. Схемы механизмов показаны на рис. 6.1–6.4. Колеса, обозначенные на рисунках одной цифрой, жестко соединены друг с другом. Нити, соединяющие колеса между собой, считать нерастяжимыми, проскальзыванием в точках касания колес между собой и со стержнем пренебречь. Стержень 1 движется вдоль оси x с постоянным ускорением. Проекция ускорения стержня на ось x равна a x см/с2, проекция на эту ось его ско-
рости в начальный момент времени равна v0 x см/с. Необходимые
данные приведены в табл. 6.1.
Пример. Определить в момент времени t1 = 1 с скорость и ускорение точки М колеса 3 механизма, изображенного на рис. 6.5.
Радиусы колес |
механизма: R2 = 15 см, |
r2 = 5 см, R3 = 20 см, |
r3 = 10 см. Стержень 1 движется вдоль оси |
x с постоянным уско- |
|
рением, причем a x |
= –3 см/с2 , v0 x = 8 см/с. |
|
Решение. Для нахождения скорости и ускорения точки М необходимо связать между собой кинематические характеристики стержня и двух колес. Поскольку стержень движется поступательно, все его точки имеют одинаковые скорости и ускорения. Проекция на ось x скорости точки A стержня равна
|
vA x (t) a x dt ( 3) dt 3t c1 8 3t . |
(6.1) |
|
Константа |
c1 |
определена из начального |
условия |
vA x (0) v0 x = 8. Отсутствие проскальзывания в точке A позволяет
записать уравнение, связывающее модули скорости точки A vA и угловой скорости 2 колеса 2: |vA (t) | | 2 (t) | r2 . Из рис. 6.5 вид-
но, что при движении стержня в положительном направлении оси x колесо 2 будет вращаться по часовой стрелке (напомним, что положительным считается направление вращения против часовой стрелки), поэтому
2 (t) vAx (t) / r2 0.6t 1.66 (1/с). |
(6.2) |
35 |
|
|
|
|
|
|
|
Таблица 6.1 |
||
|
|
Радиусы, см |
|
Ско- |
Уско- |
|
||
|
|
|
|
|
рость |
рение |
|
|
№ |
R2 |
r2 |
R3 |
r3 |
стерж- |
стерж- |
t1, с |
|
ня 1 |
ня 1 |
|||||||
|
||||||||
|
|
|
|
|
v0 x |
a x |
|
|
1 |
60 |
– |
36 |
24 |
2 |
–1 |
1 |
|
2 |
80 |
60 |
20 |
– |
3 |
–2 |
2 |
|
3 |
100 |
60 |
75 |
– |
–4 |
2 |
2 |
|
4 |
50 |
– |
60 |
45 |
–4 |
–3 |
1 |
|
5 |
80 |
30 |
45 |
– |
3 |
–1 |
3 |
|
6 |
100 |
20 |
30 |
– |
–7 |
1 |
2 |
|
7 |
45 |
35 |
105 |
– |
8 |
–5 |
1 |
|
8 |
35 |
10 |
10 |
– |
–6 |
2 |
2 |
|
9 |
40 |
30 |
15 |
– |
0 |
7 |
2 |
|
10 |
35 |
15 |
40 |
– |
–5 |
–3 |
1 |
|
11 |
40 |
25 |
20 |
– |
–9 |
8 |
2 |
|
12 |
20 |
15 |
10 |
– |
5 |
–1 |
1 |
|
13 |
30 |
20 |
40 |
20 |
–1 |
4 |
2 |
|
14 |
15 |
– |
50 |
40 |
–2 |
–1 |
1 |
|
15 |
15 |
10 |
15 |
– |
5 |
2 |
3 |
|
16 |
20 |
10 |
25 |
15 |
4 |
–1 |
2 |
|
17 |
15 |
10 |
20 |
– |
8 |
–4 |
3 |
|
18 |
20 |
15 |
30 |
18 |
–3 |
2 |
2 |
|
19 |
15 |
10 |
20 |
12 |
5 |
1 |
1 |
|
20 |
25 |
15 |
50 |
– |
0 |
8 |
3 |
|
21 |
20 |
10 |
30 |
– |
6 |
–5 |
2 |
|
22 |
40 |
20 |
35 |
– |
7 |
–2 |
2 |
|
23 |
40 |
30 |
30 |
– |
–10 |
9 |
1 |
|
24 |
30 |
15 |
40 |
20 |
9 |
8 |
1 |
|
25 |
50 |
20 |
60 |
– |
–8 |
–4 |
3 |
|
26 |
32 |
24 |
48 |
16 |
–4 |
4 |
2 |
|
27 |
40 |
18 |
40 |
– |
5 |
–1 |
2 |
|
28 |
40 |
20 |
40 |
– |
8 |
5 |
3 |
|
29 |
25 |
20 |
30 |
– |
4 |
–1 |
2 |
|
30 |
30 |
– |
20 |
15 |
–1 |
3 |
2 |
|
|
|
|
|
36 |
|
|
|
|

1 |
2 |
М
|
х |
М |
х |
3 |
4 |
М |
|
х |
М |
х |
|
5 |
6 |
М |
М |
х
х
7 |
8 |
|
М |
х |
М |
|
|
||
х |
|
|
|
|
|
|
Рис. 6.1
37

9
х
11
М
13
х
10
М
х
М
12
х
х |
М |
14
М
М
х
15 |
16 |
М
х
х
М
Рис. 6.2
38
17
М
19
М
21
х
23
18
М
х
х
20
М
х |
х |
22
М
х
М
24
М
М
х
х
Рис. 6.3
39