

Построение фазового портрета в Matlab Simulink
.pdf1. Построение фазового портрета в Matlab Simulink
Фазовый портрет представляет собой совокупность фазовых траекторий. Для системы второго порядка фазовая траектория представляет собой совокупность точек, горизонтальная координата которых соответствует выходной функции, а вертикальная – производной от этой функции в каждый момент времени t. Пример:
Рис.1.1. Фазовый портрет.
Каждой фазовой траектории соответствуют свои начальные условия (значения y и y' в момент времени t=0). В приведённом выше примере это точка (1,1). В принципе, по одной фазовой траектории можно получить представление о поведении системы.
Предположим, наша система описывается уравнением
T 2 d 2 y(t) |
2 T |
dy(t) |
y(t) 0 |
dt2 |
|
dt |
|
Это уравнение можно представить в виде
d 2 y(t) |
0 |
|
2 dy(t) |
|
y(t) |
|
dt2 |
T dt |
T 2 |
||||
|
|
|
Согласно уравнению составляется схема:
Рис.1.2. Вид схемы моделирования для получения фазовой траектории
Для построения траектории используется блок XY Graph из раздела Sinks. На вход системы подаётся 0 с помощью блока Constant из раздела Sources. В его настройках указывается Constant Value “0”.
Начальные условия задаются в настройках интеграторов. Необходимое значение устанавливается в поле Initial condition. Начальное значение функции устанавливается для интегратора, на выходе которого функция y. Начальное значение производной – для того, у которого на выходе производная. Начальные условия (0,0) не годятся. В этом случае
1

решением уравнения будет функция y=0, y' тоже равно нулю. Вся фазовая траектория будет представлять собой точку (0,0), и по ней ни о чём нельзя будет судить. Обычно берутся начальные условия (1,1).
Пример:
T 2 |
d 2 y(t) |
2 T |
dy(t) |
y(t) 0 |
|
dt2 |
dt |
||||
|
|
|
T=0,4; ξ=0,4
Подставляем эти значения в уравнение:
0,16 |
d 2 y(t) |
0,32 |
dy(t) |
y(t) |
0 |
|||||
|
dt2 |
|
dt |
|||||||
|
|
|
|
|
|
|
|
|||
Преобразуем уравнение: |
|
|||||||||
|
d 2 y(t) |
0 |
2 |
dy(t) |
6,25y(t) |
|
||||
|
dt2 |
|
dt |
|
|
|||||
|
|
|
|
|
|
|
|
|||
Составляем по нему схему:
Рис.1.3. Пример моделирования для получения фазовой траектории
Начальные условия задаём для каждого интегратора 1:
Рис.1.4. Окно настроек интегратора
В настройках XY Graph указываем максимальные и минимальные значения осей так, чтобы на поле влезала вся траектория:
2

Рис.1.5. Окно настроек блока XY Graph
Для получения фазовой траектории достаточной длины необходимо выставить время симуляции, большее, чем стандартное. В данном примере 200. Выставить это можно в меню Simulation –> Simulation parameters…. В открывшемся окне указывается нужное время в поле «Stop time».
Запускаем симуляцию, получаем траекторию:
Рис.1.6. Полученная фазовая траектория
3

Аналогично можно получать фазовые траектории для систем третьего порядка
a |
d 3 y(t) |
a |
d 2 y(t) |
a |
|
dy(t) |
a |
|
y(t) 0 |
|
||||||||||||
0 dt |
|
|
dt |
|
|
|
dt |
|
|
. |
||||||||||||
|
2 |
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
||||||
Преобразуем уравнение: |
|
|
|
|
|
|
|
|
||||||||||||||
d 3 y(t) |
|
0 |
|
a d 2 y(t) |
|
a |
|
dy(t) |
|
a |
3 |
y(t) |
|
|||||||||
|
dt2 |
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
||||||||
|
|
a0 |
dt |
|
|
|
dt |
|
|
|||||||||||||
|
|
|
|
|
|
|
a0 |
|
|
|
a0 |
|
|
|||||||||
По нему составляется схема:
Рис.1.7. Вид схемы моделирования системы третьего порядка для получения фазовой траектории
Начальные условия задаются уже для всех трёх интеграторов.
2. Моделирование нелинейных систем
Также можно построить фазовые траектории и для систем с нелинейными элементами. Линейная часть такой системы представляется в также, как и описано выше, а перед ней включается нелинейный элемент.В Simulink большая часть нелинейных элементов располагается в разделе Discontinuities.
Там представлены такие нелинейные элементы как:
-Relay - реле с гистерезисом. В настройках указываются «Switch on point», «Switch off point» - входные значения при котором реле переходит с низкого уровня на высокий, и с высокого на низкий. Если значения одинаковые – гистерезиса не будет. «Output when on» и «Output when off» - выходные значения высокого и
низкого уровней.
-
Dead Zone – элемент с линейной характеристикой и с зоной нечувствительности. В настройках указываются границы зоны нечувствительности.
-Saturation – элемент с линейной характеристикой и насыщением. В настройках указвывются значения, при которых наступает насыщение.
4
Кроме того, при создании моделей нелинейных систем может понадобиться блок Sign из раздела Math Operations. При подаче на вход отрицательного значения на выходе блока будет -1, при подаче 0 – будет 0, а при подаче положительного – на выходе установится единица.
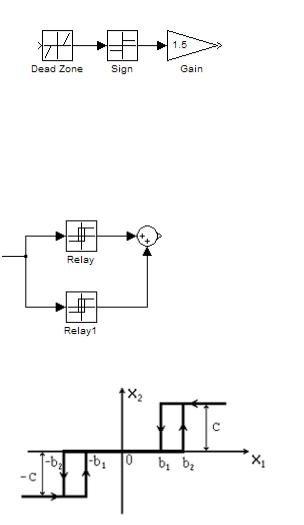
Чтобы получить реле с зоной нечувствительности, необходимо последовательно соединить блоки Dead Zone и Sign. Границы зоны нечувствительности указываются в настройках блока Dead Zone. Если выходной уровень должен быть отличен от единицы, на выход ставится усилитель.
Рис.2.1. Модель реле с зоной нечувствительности
Реле с зоной нечувствительности и гистерезиса можно получить с помощью суммы сигналов с двух реле.
Рис.2.2. Модель реле с зоной нечувствительности и гистерезисом.
Рис.2.3. Релейная характеристика с зоной нечувствительности и гистерезисом.
Для первого реле указывается момент включения («Switch on point») равный значению b2, а выключения («Switch off point») - равный значению b1 Значение высокого уровня «Output when on» - равно c, а низкого равно 0.
Для второго реле «Switch on point» устанавливается значение –b1, а «Switch off point» - значение –b2 Значение высокого уровня «Output when on» - равно 0, а низкого равно -с.
Например, b1=1, b2=2, с=0,5.
5

Рис.2.4. Настройка первого реле.
Рис.2.5. Настройка второго реле.
Умея строить фазовые траектории для линейных систем и моделировать нелинейные элементы, можно получить фазовый портрет для нелинейной системы.
6

Дана система.
Рис.2.6. Функциональная схема нелинейной системы.
Линейная часть системы описывается уравнением:
3 d 2 y2(t) dy(t) 4F( y(t)) , dt dt
Нелинейный элемент F(y(t)) – реле с гистерезисом и зоной нечувствительности.
В соответствии с указаниями, приведёнными в первом разделе, построим схему линейной части, зададим начальные условия для интеграторов.
Рис.2.7. Схема линейной части системы.
На вход системы установим нелинейный элемент и произведём его настройку:
Рис.2.8. Схема системы с нелинейным элементом.
Охватим систему обратной связью и установим в качестве источника константу «0»:
Рис.2.9. Схема модели нелинейной системы.
Указываем в настройках нужное время симуляции (меню Simulation –> Simulation parameters…–>Stop time)(примерно 200).
Запустив симуляцию, получаем фазовую траекторию.
7

Рис.2.10. Фазовая траектория нелинейной системы.
Также по этой схеме можно получить переходной процесс. Для этого блок XY Graph заменяется на Scope, а константа 0 на блок Step. Для интеграторов устанавливаются нулевые начальные значения. Или же можно представить линейную часть в виде передаточной функции.
Рис.2.11. Схема для получения переходного процесса. Линейная часть – в виде передаточной функции.
Важно иметь в виду следующее – при наличии элементов с зоной нечувствительности или гистерезисом система может никак не отреагировать на единичное ступенчатое воздействие. Это произойдёт, если входное значение для первого переключения (величина b2 в данном примере) больше единицы. Тогда для получения переходного процесса необходимо либо уменьшить это значение, либо установить большую величину для ступенчатого воздействия (изменить «Final value» в настройках элемента Step). В нашем примере необходимо задать значение, большее b2.
8

Рис.2.12. Переходной процесс нелинейной системы. «Final value» для Step равно трём.
А.А. Барашков
9