

Модель поплавкового уровнемера
Пусть из исследуемого объекта выделено звено, функцией которого является преобразование уровня жидкости в перемещение пластины емкостного преобразователя.
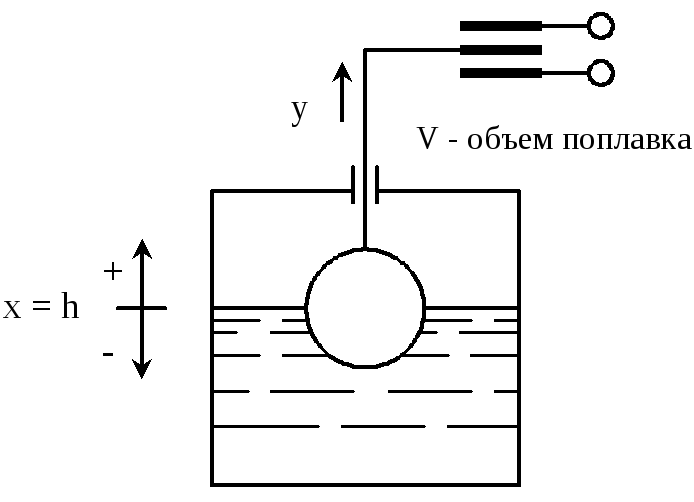
Рис. 2. Поплавковый преобразователь уровня
Как видно из рисунка, звено состоит из сферического поплавка, погруженного в исходном положении наполовину в жидкость и с помощью штока прикрепленного к левому плечу рычага. Конец правого плеча рычага является пластиной конденсатора емкостного преобразователя.
Известно, что электростатическими силами, действующими со стороны емкостного преобразователя на динамику перемещения поплавка можно пренебречь ввиду их малости. Это пример физической развязки, которая позволяет выделить поплавок с рычагом в отдельное звено.
Входным сигналом звена будем считать изменение уровня жидкости h относительно некоторого исходного, условно принятого за 0. Положительным будем считать значения h при увеличении уровня жидкости.
За выходной сигнал для удобства примем не перемещение пластины емкостного преобразователя, а перемещение, обозначенное как y, штока поплавка. При равенстве плеч рычага и при абсолютной жесткости рычага эти перемещения будут равны.
Таким образом, анализируемое звено можно представить в виде блока с одним входом и выходом
![]()
Рис. 3. Искомая модель поплавкового преобразователя
Исследуем свободное движение поплавка.
Для этого сообщим системе некоторое
начальное смещение h0= y0и
начальную скорость![]() и, убрав в некоторый момент t = 0 внешние
силы (которые нужны были для задания
начальных значений), будем наблюдать
свободное движение (в данном случае
механическое движение) системы.
и, убрав в некоторый момент t = 0 внешние
силы (которые нужны были для задания
начальных значений), будем наблюдать
свободное движение (в данном случае
механическое движение) системы.
В любой момент времени на систему действуют: выталкивающая сила Архимеда Pa(y), направленная вверх (примем это направление за положительное); сила веса, направленная вниз и равная mg (mмасса системы, gускорение свободного падения); сила трения, направленная против движения и пропорциональная (как следует из изучения физики движения тел в жидкости при малых скоростях) скорости движения, т.е. равная kdy/dt; сила инерции, которую необходимо учесть в динамике и которая по принципу Даламбера направлена против движения и равнаmd2y/dt2. Таким образом, уравнение баланса сил имеет вид:
![]() (*)
(*)
В установившемся состоянии y = 0, dy/dt = 0, d2y/dt2= 0 и из уравнения динамики получим уравнение статики
Pa(0) = mg. (**)
Рассмотрим выталкивающую силу и ее зависимость от y. По закону Архимеда можно записать, что она равна объему погруженной части поплавка Vп(y), умноженной на плотность жидкости d и на ускорение свободного падения g, т.е. равна весу вытесненной жидкости:
Pa(y) = V(y)dg.
Обозначим полный объем поплавка радиуса R через V = 4R3/3 и будем считать, что в установившемся состоянии поплавок погружен наполовину и при смещении от этого положения изменения погруженной части происходят за счет малых (при малых y) изменений объема средней части поплавка. Будем считать, что в средней части поплавок имеет приближенно цилиндрическую форму с площадью основанияR2. Тогда
Vп(y) = V/2R2y; Pa(y) = (V/2R2y)dg
Т.к. (V/2)dg = Pa(0), то Pa(y) = Pa(0)R2dgy.
Подставляя в (*), получаем:
![]()
Разделив обе части уравнения на коэффициент при y, получим математическую модель в хорошо известной форме:
![]()
где
![]() постоянная времени
звена;
постоянная времени
звена;![]() степень затухания.
степень затухания.
Преобразовав последнее уравнение по Лапласу, можно представить искомую модель звена в виде:
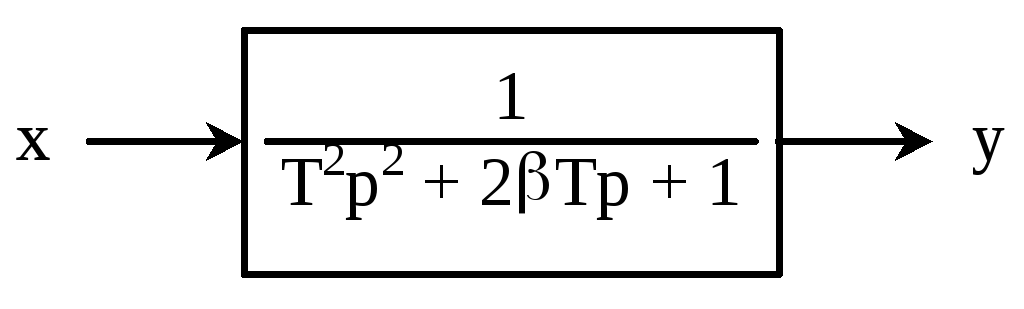
Рис. 4. Модель поплавкового преобразователя
Рассмотрим параметры звена T и .
Учитывая, что
![]() ,
получаем:
,
получаем:
![]()
Подставив это выражение для массы в выражение для T, получим:
![]()
Последнее выражение позволяет вычислить постоянную времени (как важнейшую характеристику динамики), если известен конструктивный параметр R (например, при R = 1 м и g = 10 м/с T = 0.26 с), или вычислить конструктивный параметр R, задавшись значением T.
Что касается второго параметра степени успокоения, то он зависит от коэффициента трения k, численное значение которого теоретически получить не удается. Для определения этого параметра необходимо прибегнуть к специально поставленному эксперименту. Необходимо практически изготовить опытный поплавок из материала, который будет использоваться при изготовлении реального устройства, и записать свободные затухающие колебания поплавка в той же жидкости, которая будет в реальном объекте. Используя затем методы идентификации (изучаемые ниже), по полученной экспериментальной записи можно получить численные значенияили k.
Этот процесс аналитического вывода модели и экспериментального подхода для определения параметров является характерным для большинства случаев т.н. аналитического подхода для получения математического описания объекта.
В связи с этим часто утверждают, что нет чисто аналитического подхода, а есть аналитическо-экспериментальный подход.
Отметим (на данном характерном примере), что аналитический вывод позволяет получить пригодные результаты при условии введения определенного числа упрощений и допущений. Например, в данном случае не учтены такие эффекты как:
трение о воздух и связанные с этим потери энергии,
влияние температуры на линейное расширение материалов,
влияние соотношения объемов поплавка и емкости с жидкостью,
не идеальность поверхности жидкости и ряд других.
При учете всех факторов модель может получиться слишком сложной и в то же время малопригодной для дальнейшего решения задачи управления.