

Отыскание пф системы с var-параметрами
ПФ системы с переменными параметрами можно определить либо по функциям веса:
W(s, t) = -t w(t-, ) e-(t-)s d = o+ w(, t-) e-s d ,
либо по переходной функции h(t
W(s, t) = s -t h(t e-(t-)s d = s o+ h) e-s d ,
но этот подход нерационален, т.к. требует знания типовых реакций системы h и w.
Более удобно находить ПФ W(s, t) из исходного ДУ с var-параметрами:
A(s, t) W(s, t) + N{W(s, t)} = B(s, t) ,
где:
A(s, t) = a0(t)sn+...+an(t) ; B(s, t) = b0(t)sm+...+bm(t) ;
N{W(s, t)} =[ dA/ds dW/dt + ... + 1/n! dnA/dsn dnW/dtn ] .
Решение ДУ, т.е. ПФ W(s, t) будем искать в виде ряда:
W(s, t) = W0(s, t) + W1(s, t) + ...
где: W0(s, t) = B(s, t) / A(s, t); Wk(s, t) = N{Wk-1(s, t)} / A(s, t) .
Устойчивость и качество регулирования систем с var-параметрами
Поскольку в квазистационарных САР параметры меняются много медленней свободного движения системы, параметрическую САР считают устойчивой, если при всех "замороженных" комбинациях параметров она остается устойчивой.
Т.е. в параметрической ПФ W(s, t) фиксируют время t в диапазоне 0 < t < T и многократно исследуют на устойчивость, используя любой из критериев. Максимальное внимание надо уделить временным интервалам, где параметры меняются быстро или происходит смена знака. Особенно эффективно использование корневого годографа, зависимого от var-параметра, для оценки тенденций в системе.
При оценке качества регулирования следует учитывать, что коэффициенты ошибок получаются зависимыми от времени: Ck = [dkx(s, t) / dsk], при s=0.
Изменение параметров можно рассматривать как возмущающее воздействие на систему. Соответственно составляющие ошибки от var-параметра не будут сводиться к нулю, за исключением случая, когда содержащее var-параметр звено установлено в цепи ОС или в прямом канале до интегрирующих элементов. Поскольку динамика изменения var-параметров в сравнении с динамикой задающего воздействия g(t) не значительна в случае квазистационарных систем, то соответствующие составляющие ошибок: по скорости, ускорению, ... - как правило, меньше.
Синтез параметрических сар
При синтезе САР на ЭВМ так же используют "замораживание" коэффициентов, и, если во всем рабочем интервале времени качество САР оказывается приемлемым, ее считают работоспособной.
Во многих случаях удается выделить одно звено первого или второго порядков с var-параметром. Тогда возможно осуществить синтез САР расчетным путем.
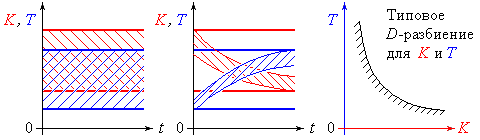
При синтезе следует стремиться максимально точно определить законы изменения параметров и не ограничиваться диапазонами. Так для случая 2 изменений var-параметров, согласно "D"-разбиению вероятность сохранения устойчивости существенно больше.
Системы с запаздыванием Система линейная с запаздыванием
Линейной системой с запаздыванием называется такая, которая содержит в своей структуре хотябы одно звено, в котором есть неизменное запаздывание во времени изменения выходной координаты после начала изменения входной.

Рассмотрим апериодическое звено первого порядка, которое описывается уравнением:
T dy/dt + y = K x(t) . (1)
Уравнение соответствующего звена с запаздыванием будет иметь вид:
T dy/dt + y = K x(t-) . (2)
Оно называется дифференциально-разностным.
Обозначим x*(t) = x(t-), тогда уравнение (2) запишется в обыкновенном виде:
T dy/dt + y = K x*(t) . (3)
Следовательно его переходная характеристика соответствует апериодическому звену (рис. 1в), но задержана на с, что определено задержкой воздействия x*(t) (рис. 1б).
Резюме:
Временная характеристика любого звена с запаздыванием будет такая же, как у соответствующего обыкновенного звена, но только сдвинута по оси времени вправо на величину .
Величину запаздывания в звене можно определить экспериментально, путем снятия временной характеристики.