

Моделирование сар на эвм.
Возмущающее воздействие в замкнутой системе регулирования, приводящее к отклонению регулирующего параметра, может воздействовать на объект по различным каналам.
На характер изменения регулируемого параметра влияют как величина и форма возмущающего воздействия, так и динамические свойства регулируемого объекта по каналу от источника возмущения до места установки измерительного устройства.
Ниже приводятся два варианта построения графиков переходного процесса в одноконтурной САР (см. рис. 1.3):
при единичном скачкообразном изменении возмущающего воздействия хв, действующего по каналу регулирования (1);
при единичном скачкообразном изменении заданного значения уз (2).
Пусть уравнение объекта регулирования имеет вид:
![]()
В качестве регулятора выбран ПИ-регулятор:
![]()
При моделировании САР на ЭВМ уравнение объекта и регулятора записываются в разностной форме.
Расчётная часть. Расчет и моделирование одноконтурной сар.
Задание.
Дана передаточная функция объекта
![]()
К=0.15; Т=6; =2;
=0,75 (m=0,221).
Решение. Перейдем от передаточной функции объекта к расширенной амплитудо-фазовой характеристике:
![]()
Инверсная расширенная АФХ объекта в алгебраической форме записи будет иметь вид:

Подставив расширенные инверсные вещественную Ro*(m,) и мнимую Jo*(m,) частотные характеристики объекта в (1.20) получим:
![]()
![]()
Произведем расчеты настроек П1 и П2 для различных значений частоты при:
=0,75 (m=0,221). В плоскости настроечных параметров регулятора строим линии равной степени затухания.
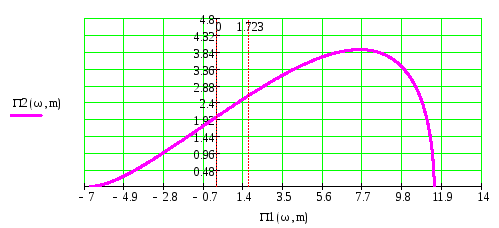
В соответствии с эмпирическим методом определения параметров настройки регулятора, оптимальных в смысле минимума квадратичной интегральной оценки, выбираем точку на линии равного затухания несколько правее точки экстремума. Этой точке соответствуют координаты:
ПИ-регулятор (8,8; 3,8)
 И-Регулятор
(0; 1,93)
И-Регулятор
(0; 1,93)
П-регулятор (11,5; 0)
По возмущающему воздействию
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
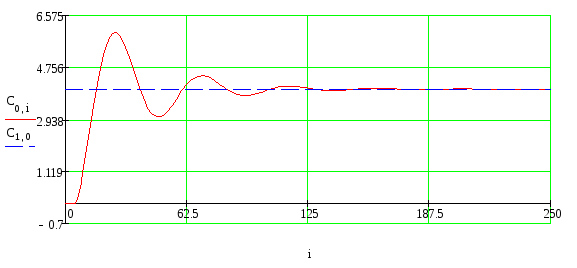
Ниже приведены графики для различных настроечных параметров П, И, ПИ – регуляторов, при возмущающем воздействии:
П - регулятор:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

И - регулятор:
![]()
![]()
![]()
![]()
![]()
![]()
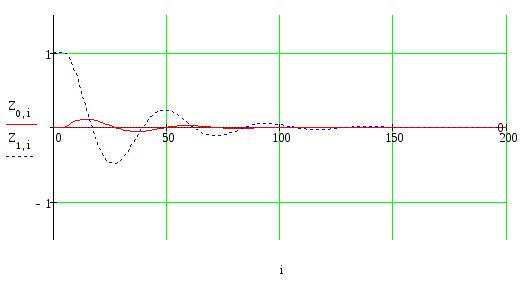
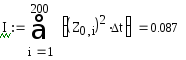
ПИ - регулятор:
![]()
![]()
![]()
![]()
![]()

Без регулятора:
![]()
![]()
![]()
![]()
Вне границы устойчивости:
![]()
![]()
![]()
![]()

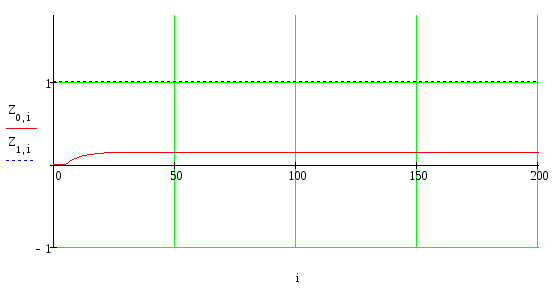
По задающему воздействию
При моделировании задающего воздействия алгоритм, выполненный в программе MathCad, будет выглядеть следующим образом:

И - регулятор:
![]()
![]()
![]()
![]()

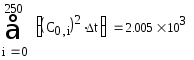
ПИ - регулятор:
![]()
![]()
![]()

П - регулятор:
![]()
![]()
![]()

Сравнительные анализы критериев качества переходных процессов Сравнительный анализ графиков переходных процессов при использовании п-, и-, пи- регуляторов при возмущающем воздействии:
-
Прямые показатели качества переходных процессов
=0,75
Регулятор
П
И
ПИ
Время переходного процесса, tп
70
125
150
Стат. ошибка регулирования
0.3
0
0
Время достижения первого максимума, tmax, сек
12
15
10
Колебательность ПП
3
3
5
Степень затухания
0.69
0.70
0.72