

литература / Sharapov_V._Datchiki
.pdfГлава 8. Емкостные датчики
бины погружения электродов 2 в жидкость. Изменение глубины погружения приводит к изменению напряженности поля и, следовательно, емкости датчика.
Емкость такого датчика рассчитывается по формуле [2, 5, 14, 16]:
|
|
|
|
l |
n/2 |
|
|
< |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
C |
2n |
|
|
|
|
|
|
|
, |
(8.19) |
|
|
|
|
|
|
|
|
|
||||||
|
|
0 |
i 1 |
|
|
|
|
< |
<(2i 1) |
|
||||
|
|
|
|
2 1 2 2 cos |
|
|
||||||||
|
|
|
|
|
|
ln |
|
|
|
|
n |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|||
|
|
|
|
|
||||||||||
где |
1 |
|
, 2n — количество электродов; a — ширина электродов; l — дли- |
|||||||||||
|
||||||||||||||
1 a d
на электродов; d — расстояние от электрода до вершины угла, образованного соседними электродами.
Емкость датчика эквивалентна параллельному соединению двух емкостей, одна из которых — это емкость части датчика высотой h, заполненной жидкостью с относительной диэлектрической проницаемостью , другая — емкость свободной от жидкости части датчика высотой (H-h).
Исходя из этого выражение для емкости датчика, погруженного в жидкость, имеет вид [13, 15]:
C C0 / ( h H h) C0 [H h( 1)], |
(8.20) |
Рис. 8.12. Цилиндрический емкостный датчик: 1 — электроды; 2 — диэлектрический цилиндр
Рис. 8.13. Емкостный датчик уровня с радиальными электродами: 1 — электроды; 2 — труба
где C0 — емкость единицы длины датчика без жидкости; H — высота электродов; h — высота уровня жидкости.
Входной величиной этого датчика является произведение h·( 1).
Зависимость емкости датчика C от глубины погружения в жидкость h линейная.
На рис. 8.12 представлена конструкция емкостного датчика, выполненного в виде цилиндра 2 с электродами 1, расположенными на наружной поверхности цилиндра и образующими параллельно соединенные конденсаторы [1].
На рис. 8.13 показана конструкция емкостного датчика, выполненного в виде цилиндрической трубы 2 с электродами 1, расположенными на внутренней поверхности трубы перпендикулярно касательным к цилиндрической трубе в точках касания и образующими параллельно соединенные конденсаторы [16].
Зависимость емкости датчика C от глубины погружения в жидкость h линейная.
Использование конструкции датчика, показанной на рис. 8.13, при одинаковых разме-

8.4. Емкостный датчик перемещений (неровности поверхности)
рах электродов позволило увеличить чувствительность датчика в 1,22 раза по сравнению с датчиком, изображенным на рис. 8.11.
В работе [16] предложена конструкция |
|
|
емкостного датчика уровня, выполненного |
|
|
в виде цилиндра 2 с электродами 1, распо- |
|
|
ложенными на наружной поверхности ци- |
|
|
линдра, а электроды 1 покрыты изоляцион- |
|
|
ным материалом (рис. 8.14). |
Рис. 8.14. Емкостный датчик уров- |
|
В работе [15] приведена методика рас- |
||
ня с радиальными электродами на |
||
чета емкости датчиков, изображенных на |
||
наружной поверхности цилиндра: |
||
рис. 8.14 и 8.15. |
1 — электроды; 2 — цилиндр |
8.4.Емкостный датчик перемещений (неровности поверхности)
Измерение линейных размеров в диапазоне от нескольких микрон до нескольких сантиметров занимает значительное место в различных отраслях науки и техники. Наиболее распространенными измерениями в этом диапазоне являются измерения размеров деталей, отклонений размеров деталей от номинального значения, измерение параметров неровностей и шероховатостей поверхности, толщины покрытия деталей, измерения малых перемещений [12, 13].
На рис. 8.15 показан эскиз конструкции емкостного преобразователя перемещений фирмы Thrymus—Sylvac [19] и структурная схема его измерительной цепи. Подвижной цилиндрический электрод 2 преобразователя механически соединен с измерительным щупом 1 и может перемещаться внутри неподвижного электрода 3. Выходная межэлектродная емкость Cx является элементом LC-контура мультивибратора МВ. Период Tx выходного напряжения мульти-
|
3 |
|
000 |
|
|
|
|
|
2 |
|
|
|
Cx + Ck |
|
T |
x |
МВ |
АЦП |
|
|
|
|
1
Рис. 8.15. Емкостной преобразователь перемещений фирмы Thrymus—Sylvac

Глава 8. Емкостные датчики
вибратора является функцией емкости Cx , а следовательно функцией измеряемого перемещения. Выходным измерительным прибором является цифровой измеритель периода.
Для минимизации влияния емкости кабеля Ck мультивибратор размещен в корпусе преобразователя.
Диапазон рабочих перемещений такого преобразователя составляет 20 мм, разрешающая способность 0,001 мм, неопределенность 0,002 мм.
8.5. Измерительные схемы емкостных датчиков
Емкостные датчики обладают сравнительно высокой точностью и довольно низкой стоимостью. Однако разработчики, решившие использовать емкостные датчики в своей конструкции, вынуждены предусмотреть сначала преобразование емкости в напряжение, а затем преобразование этого напряжения в цифровой сигнал с помощью прецизионного АЦП. В итоге система может оказаться более дорогостоящей, менее точной или и то, и другое сразу [3, 4].
Существует несколько типичных методов измерения емкости.
Прямой метод подразумевает заряд конденсатора от источника тока в течение определенного времени и затем измерение напряжения на конденсаторе. Этот метод требует наличия прецизионного источника очень маленького тока и высокоимпедансного входа измерителя напряжения.
Второй метод подразумевает использование измеряемой емкости в качестве времязадающей в RC-генераторе с последующим измерением постоянной времени, частоты или периода. Этот метод прост, но обычно не обеспечивает высокой точности.
Еще один подход заключается в измерении импеданса конденсатора на переменном токе. Источник синусоидального сигнала подключается к конденсатору и при этом измеряются напряжение и ток через конденсатор. При использовании четырехпроводного логометрического подключения (при котором измеряется соотношение импедансов) и синхронного демодулятора можно получить наиболее точный результат.
Однако такая схема сравнительно сложна и состоит из многих компонентов.
Наиболее распространенный метод измерения емкости прецизионного датчика с малой величиной емкости заключается в применении зарядового усилителя, который преобразует соотношение измеряемой и опорной емкостей в сигнал напряжения. Такая схема поставляется в виде специализированных микросхем и подходит для некоторых систем при больших объемах производства [2].
Во всех описанных методиках емкость сначала преобразуется в напряжение, которое затем преобразуется в цифровой код при помощи прецизионного АЦП.
На рис. 8.16. показана схема цепи с ОУ, построенная по принципу делителя напряжения [6]. В данном случае Uвых = U C1/C2. C помощью такой цепи удобно преобразовывать в напряжение изменение зазора между обкладками кон-

8.5. Измерительные схемы емкостных датчиков
Рис. 8.16. Схема преобразования емкости в напряжение
денсатора С (U |
вых |
= U ϑ |
C1 2 |
) или изменение площади конденсатора C |
(U |
вых |
= |
||
|
|||||||||
|
2 |
|
0S2 |
1 |
|
||||
|
0S1 |
|
|
|
|
|
|
||
= U |
). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1C2 |
|
|
|
|
|
|
|
|
Вобоих случаях зависимость выходного напряжения от измеряемой величины будет линейной.
Всхеме 8.16 емкости экранированных проводов Сэ1, Сэ2, Сэ3 практически не влияют на работу измерительного устройства. Это объясняется тем, что емко-
сти Сэ1 и Сэ3 включены параллельно источнику переменного напряжения Uϑ и ОУ, имеющим низкие выходные сопротивления. Емкость же Сэ2 включена параллельно входам ОУ, и напряжение на ней близко к нулю.
Дифференциальные емкостные датчики включаются преимущественно в мостовые измерительные цепи. На рис. 8.17 даны примеры таких цепей, содержащих мосты с индуктивно-связанными плечами [6].
Выходной сигнал в цепи (рис. 8.17, а) подан на вход повторителя напряжения, выполненного на ОУ. Если принять, что напряжение на каждой половине вторичной обмотки трансформатора равно U , то выходное напряжение
равно Uвых = U (С1 — С2) / (С1 + С2).
Емкости Сэ1 и Сэ2 экранированных проводов, соединяющих датчик с трансформатором, включены параллельно полуобмоткам трансформаторов и роли не играют. Для уменьшения влияния емкости экранированного провода, соединяющего датчик с усилителем, применяется схема эквипотенциальной защиты. Для этой цели используется провод с двойным экраном. Наружный экран присоединяется к земле, а внутренний — к выходу повторителя напряжения. Ток с центрального проводника на внутренний экран отсутствует, так как равны между собой напряжения в точках а и б относительно земли. Ток между внутренним и внешним экраном не сказывается на работе устройства, поскольку нагружает низкоомный выход повторителя напряжения.
Необходимость в двух экранах отпадает при подсоединении выхода моста к инвертирующему входу ОУ (рис. 8.17, б). Поскольку потенциал на этом входе усилителя близок к нулю, то ток между проводом, подсоединенным к этому входу, и окружающим его экраном будет практически равен нулю. Для цепи (рис. 8.17, б) верно соотношение Uвых = U (С1 - С2)/С3.

Глава 8. Емкостные датчики
а) |
б) |
в) |
г) |
Рис. 8.17. Мостовые измерительные цепи емкостных датчиков
На рис. 8.17, в показана модификация мостовой цепи при емкостном токосъеме с подвижной пластины. Экраны и паразитные емкости на схеме рис. 8.17, в и на последующих схемах не показаны с целью упрощения рисунков.
Обозначим емкости между неподвижной и подвижной пластинами индексом, соответствующим номеру неподвижной пластины.
В плечо моста входят емкости C1 + С5 и С2 + С6. Через емкость С3 + С4 подключена вершина измерительной диагонали моста к выходу ОУ. В результате выходное напряжение Uвых определится формулой :
U |
вых |
= U |
|
|
(C1 C5) (C2 |
C6) |
|
|
C3 C4 |
. |
(8.21) |
||||||
C |
C |
C |
C |
|
C |
|
C |
|
|
||||||||
|
|
4 |
5 |
6 |
|
C |
o.c. |
|
|||||||||
|
|
|
1 |
2 |
3 |
|
|
|
|
|
|
||||||
При перемещении пластины в направлении, указанном стрелкой, емкость C1 + С5 увеличивается, емкость С2 + С6 уменьшается, а емкость токосъема С3 + С4 остается практически неизменной, так как емкость С3 увеличивается, а емкость С4 уменьшается.
В схеме, приведенной на рис. 8.17, г, показано, как с помощью охранных электродов улучшить характеристики емкостных преобразователей. Здесь емкостные преобразователи образованы пластинами 1, 4 и 2, 6. Пластины же 3, 5, 7 служат охранными электродами. Поскольку пластины 4 и 6 присоединены к инвентирующему входу ОУ, то напряжение на них весьма близко к нулю. Поэтому поле между пластинами 1 и 3, 4, 5, а также между пластинами 2 и 5, 6, 7 будет практически однородным. Благодаря этому исключается влияние краевого эффекта на работу преобразователей (краевые искажения поля теперь будут наблюдаться между пластинами 1, 2 и 3, 5,7).
Общим недостатком схем, приведенных на рис. 8.16 и 8.17, является то, что они могут быть рекомендованы только для датчиков, у которых все пластины изолированы от корпуса, что иногда бывает трудно реализовать конструктивно.

8.5. Измерительные схемы емкостных датчиков
Представляет интерес использование стандартной микросхемы прецизионного таймера NE555 на биполярных транзисторах либо ее более современный аналог на базе КМОП-технологий таймера ICM7555 [19].
На рис. 8.18, а показана схема подключения датчика СХ к микросхеме NE555.
а) |
б) |
Рис. 8.18. Измерительное устройство на базе таймера: а — схема измерительного преобразователя емкость—частота; б — график зависимости частоты информационного сигнала от параметров R1, R2 и СХ
Микросхема включена в режиме мультивибратора. Во времязадающую цепь RC-генератора включены времязадающие резисторы R1 и R2 с известными значениями сопротивлений. Преобразованный сигнал в виде частоты может подаваться на любое микроконтроллерное устройство для дальнейшей обработки.
Следует отметить, что для достижения необходимой чувствительности и стабильности работы устройства в нужном диапазоне измеряемой емкости требуется подбор параметров времязадающих элементов R1 и R2 (см. рис. 8.18, б).
Устройство обладает чувствительностью 0,01 пФ.
Компанией Galltec+MELA данная схема также с успехом применяется в электронных схемах чувствительных элементов оборудования для измерения влажности.
Применение в качестве таймера микросхемы ICM7555 позволяет на порядок снизить ток, потребляемый устройством, с 10 mА до 100 А, что добавляет неоспоримые преимущества при конструировании устройств с автономным питанием.
Наиболее перспективными являются микроконтроллерные измерительные устройства, позволяющие не только измерять емкость датчика, но и проводить
сполученным результатом измерения необходимые расчеты.
Вчастности, реализацию способа по рис. 8.10 и алгоритмов (8.18) успешно выполняет устройство, реализуемое на базе микроконтроллера AVR ATMEGA 8-16PI фирмы Atmel, позволяющее интегрировать ее с системами пользователя

Глава 8. Емкостные датчики
по стандартному магистральному изолированному интерфейсу RS-232/RS-422/ RS-485 (рис. 8.19).
Принцип измерения электрической емкости в этом устройстве основан на измерении времени заряда конденсаторных датчиков CА и CВ до заданных пороговых значений напряжений, контролируемых встроенными АЦП микроконтроллера. Для формирования опорного напряжения, необходимого для работы АЦП, служит конденсатор С5. Заряд конденсаторных датчиков CА и CВ осуществляется через времязадающие резисторы R1 и R4, а их разряд перед последующими циклами измерений осуществляется с помощью транзисторных ключей VT1 и VT2. Для перепрограммирования устройства и изменения функциональных задач на схеме установлен интерфейсный разъем программирования ISP (на рисунке не показан).
Полученные значения электрических емкостей конденсаторных датчиков измеряются поочередно и многократно, а затем усредняются и участвуют в дальнейших расчетах согласно одному из алгоритмов (8.18).
Микроконтроллер имеет свободные выводы портов, поэтому устройство параллельно с измерением электрической емкости может вести измерения и других величин, например, температуры.
5 +5 C R5 RW E |
D4 D5D6D7 A K |
1 |
16 |
5 4 3 2 1
9 8 7 6
116
215
314
413
512
611
710
89
Рис. 8.19. Схема электрическая принципиальная устройства для измерения емкости датчиков CА и CВ

8.5. Измерительные схемы емкостных датчиков
Визуализация результатов измерений осуществляется, в зависимости от файла прошивки микроконтроллера, на цифровом жидкокристаллическом дисплее в различных форматах, например:
CА = ХХХХХ h = ХХХХХ мм/см/м;
CВ = ХХХХХ.
Устройство является универсальным и имеет несколько режимов работы: режим измерения, режим настройки, режим измерения/настройки. Переключение режимов и ввод значений констант или других параметров осуществляется при помощи трех тактовых кнопок S1 + /Reset; S2 - /Reset; S3 /menu.
Особенностью этого вторичного прибора является получение и передача измеряемой величины в цифровом виде, что дает возможность устранить дополнительные погрешности, связанные с дистанционной передачей данных. Кроме того получаемый цифровой сигнал дает возможность связать устройство с любыми приемными приборами [7, 47].
На рис. 8.20 показана упрощенная схема преобразователя с переключением конденсаторов [16], в которой переменный конденсатор Сх и эталонный конденсатор Сr являются составными
частями симметричного кремниевого датчика давления. Встроенные МОП-ключи (1 4) работают парами в противофазе и управляются тактовыми импульсами ф1 и ф2.
При замыкании соответствующей пары ключей происходит заряд того или иного конденсатора сигналом от источника постоянного напряжения Uп. Суммарный заряд в общей точке конденсаторов пропорционален разности Сх Сr и, следовательно, давлению, приложенному к датчику. Этот заряд поступает на вход преобразователя заряда в напряжение, состоящего из ОУ, интегрирующего конденсатора Сf и МОП
ключа 5, используемого для разряда Сf. Выходной сигнал такого преобразователя представляет собой импульсный сигнал с переменной амплитудой, который может быть передан по линии передачи, либо демодулирован для получения линейного сигнала, либо преобразован в цифровой код. Поскольку для построения интегратора используется ОУ с высоким коэффициентом усиления, величина его выходного напряжения не зависит ни от паразитной входной емкости С, ни от напряжения смещения, ни от температурного дрейфа.
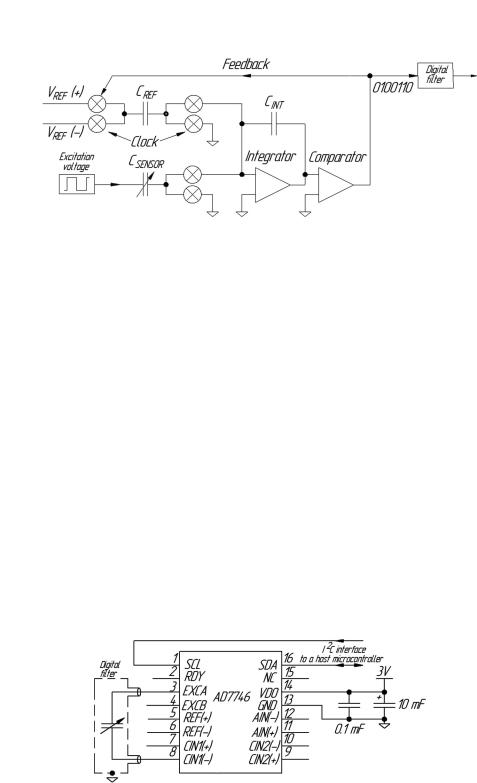
Модифицированная схема сигма-дельта модулятора показана на рис. 8.21 [3]. Фиксированное входное напряжение можно рассматривать как напряжение возбуждения. Конденсатор, емкость которого меняется, является емкостным датчиком. В результате выходной код будет соответствовать соотношению емкости датчика и опорной емкости Cref.
Глава 8. Емкостные датчики
Рис. 8.21. Сигма-дельта АЦП в качестве прямого измерителя емкости [3]
Этот подход позволяет осуществить прямое подключение емкостного датчика к сигма-дельта преобразователю, что само по себе обеспечивает такие преимущества, как высокая разрешающая способность, точность и линейность. Кроме того, имеются и другие особенности использования описанной схемы в реальной системе.
Такой интерфейс нечувствителен к величине емкости между выводами, характерными для реальных конструкций. Преобразователь емкости в цифровой код может быть воплощен полностью в виде однокристального устройства, что в результате обеспечивает высокую степень интеграции, простоту реализации схемы, высокую повторяемость, высокую надежность и — последнее по порядку, но не по значимости — значительное снижение себестоимости проекта [2].
В [3] описан емкостный датчик перемещения. Принцип его работы прост: полоска, выполненная из диэлектрического материала с известной диэлектрической проницаемостью, перемещается между двумя неподвижными пластинами. Подвижная полоска имеет ширину 10 мм. Начальная емкость (когда полоска не вдвинута в зазор) составляет 4,5 пФ. Емкость изменяется приблизительно на 0,126 пФ на миллиметр при движении полоски в зазоре между пластинами конденсатора.
Датчик подключен непосредственно к преобразователю CDC, и таким образом вся схема преобразователя состоит из одной ИС (рис. 8.22).
Рис. 8.22. Схема подключения емкостного датчика к ИС AD7746 емкости

Литература 169
Вся схема расположена на той же печатной плате, что и датчик. Преобразователь нечувствителен к паразитной емкости между электродами датчика и «землей», и это сильно упрощает задачу экранирования датчика. Даже дорожки от датчика к преобразователю можно окружить «земляной» поверхностью, получив в итоге структуру, подобную коаксиальному кабелю.
Преобразователь AD7746, который используется в этом примере, имеет диапазон измеряемой емкости ±4 пФ [3]. Этот диапазон за счет конфигурирования преобразователя можно «сместить» на 17 пФ. Типичная величина разрешающей способности в диапазоне ±4 пФ составляет 18 разрядов. Интегральная нелинейность CDC не хуже 0,01%. За счет заводской калибровки погрешность усиления не превышает 4 фФ (4·10-15 Ф).
Сопоставление параметров датчика и преобразователя дает нам следующие цифры: полный диапазон перемещения составляет около 65 мм, разрешающая способность 0,25 мм, интегральная линейность ±7 мм.
Микросхема CDC AD7746 имеет встроенный температурный датчик, а также второй канал измерения емкости, так что на базе этой ИС можно реализовать любой из описанных подходов. ИС предназначена для работы в температурном диапазоне 40...+125 °С, что позволяет размещать ее вблизи датчика. В таком случае температура кристалла AD7746 и температура датчика будут достаточно близки. Но в данной ИС имеются также стандартный дифференциальный вход напряжения и вход опорного источника, поэтому к ней можно подключить внешний датчик температуры (термистор или резистивный температурный датчик RTD) [3].
Информацию о технических характеристиках некоторых емкостных датчиков можно найти на сайтах фирм-производителей и торговых организаций [24—47].
Литература
1.А.с. 669237, G01L9/12. Преобразователь давления / И.Г. Минаев, И.Н. Постильняк (СССР). — № 2609417/18-10 заявл. 27.04.78; опубл. 25.06.79. Бюл. № 23, 1979.
2.Бинс К., Лауренсон П. Анализ и расчет электрических и магнитных полей. Пер. с англ. — М.: Энергия, 1970.
3.Брихта М. (Пер. А. Власенко). Преобразователь емкость-код на основе сигма-дельта модулятора. www.compitech.ru/html.cgi/archiv/06-01/stat_cdc.htm.
4.Измерение электрических и неэлектрических величин: Учеб. пособие для вузов/
Н.Н.Евтихиев, Я.А. Купершмидт, В.Ф. Папуловский, В.Н. Скугаров. Под общ. ред.
Н.Н.Евтихиева. — М.: Энергоатомиздат, 1990. — 352 с.
5.Иоссель Ю.Я., Кочанов Э.С., Струнский М.Г. Расчет электрической емкости. — Л.: Энергия, 1969. — 240 с.
6.Левшина Е.С., Новицкий П.В. Электрические измерения физических величин: (Измерительные преобразователи). — Л.: Энергоатомиздат, 1983. — 320 с.
7.Минаев И.Г., Мастепаненко М.А. Информационно-измерительная система контроля уровня различных жидкостей// Вiсник Черкаського державного технологiчного универсiтету. — 2010. — № 3. — С. 61-63.
8.Патент 2407993 Российская Федерация. МПК 8 G01F23/24. Емкостной способ измерения уровня жидкостей и устройство для его осуществления /Минаев И.Г., Мастепаненко М.А.; заявитель и патентообладатель ФГБОУ ПО Ставропольский государственный аграрный университет. — № 2009141472/28; заявл. 09.11.2009; опубл. 27.12.2010. Бюл. № 36. — 2 с.