

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfалгоритм может использовать крейсерскую скорость программную ско рость VN или скорость атаки Va.
Расчет траектории начинается с определения параметров неустановив шихся участков профиля полета. На основании этих параметров вычисляется поправка в полетное время, которая вместе со значением балансной скорости передается в программы формирования траектории в горизонтальной плоско сти. Эти программы с учетом метода наведения, параметров движения цели и истребителя, параметров зоны возможных атак и рекомендованных параметров атаки строят горизонтальную проекцию траектории. В ходе построения воз можны ситуации, когда цель невозможно перехватить с использованием про граммной скорости. Эти ситуации выявляются при помощи алгоритмов гори зонтальной плоскости, что приводит к появлению признака нерешения по ско рости. После изменения параметров задача возвращается к алгоритму выбора программной скорости и процесс формирования траектории повторяется. Если подобрать удовлетворительные параметры не удается, боевой расчет КП (ПН) оповещается о нерешении задачи по скорости.
Сформированная траектория оценивается на реализуемость по топливу и набору высоты. Невозможность решения задачи по этим параметрам также может изменить параметры наведения и вызвать повторное формирование тра ектории.
В результате решения штурманской задачи [11] определяются путь ис требителя и время полета до рубежа перехвата, направления и углы разворо тов, курс полета истребителя, путь и время разгона, положение точки вклю чения форсажа, длина балансного участка пути, положение точки вертикаль ного маневра.
Реализация летчиком сформированной на пункте управления пространст венной траектории имеет некоторые особенности.
На первом этапе наведения до прихода команды «Вертикаль» истребитель выполняет полет в вертикальной плоскости по базовой программе набора вы соты и скорости в соответствии с заданным значением программной скорости и командой «Форсаж». Разовые команды отображаются на индикаторе. Полет на перехват по базовому профилю при ручном управлении летчик осуществляет следующим способом. Если команда «Форсаж» поступает непосредственно по сле взлета, то это означает, что программа будет ближняя, и летчик на форсаже набирает высоту разгона. Если же команда «Форсаж» сразу не поступает, то программа дальняя или средняя. Летчик в этом случае на бесфорсажном режи ме набирает высоту, стремясь выйти на ее крейсерское значение. При приеме команды «Форсаж» на участке бесфорсажного набора высоты до выхода на крейсерскую высоту, что свидетельствует о формировании ПН для истребителя средней программы, летчик включает форсаж и на форсажном режиме набира ет высоту разгона. Если при достижении крейсерской высоты команда

«Форсаж» не поступает, летчик переводит самолет в горизонтальный полет на крейсерской высоте и скорости, поскольку программа получилась дальняя. В момент поступления команды «Форсаж» летчик выполняет команду и на фор сажном режиме набирает высоту разгона. При любой программе полета после выхода на высоту разгона летчик выполняет разгон до программной скорости. После разгона до этой скорости он осуществляет набор высоты, соответствую щей данной программной скорости, и остается на этой высоте до прихода ко манды «Вертикаль». Следует отметить, что данная команда может поступить до выхода на указанную высоту.
Второй этап наведения начинается после прихода команды «Вертикаль» и ее вида (атака по усмотрению летчика, атака снизу, атака сверху). При этом на борт выдается заданное значение скорости атаки Узад = Va. После этого лет чик осуществляет сход с базового профиля на высоту атаки цели.
5.2.2. Методы наведения в горизонтальной плоскости
Среди известных методов наведения истребителей в горизонтальной плос кости [3, 12] наибольшее применение находят метод маневра, метод перехвата и прямой метод.
При прямом методе (метод погони) требуется все время совмещать про дольную ось истребителя с направлением на цель (рис. 5.2), где точки 0С и 0Ц соответствуют положению истребителя и цели; Vc и Уц - скорости наводимого самолета и цели;  - текущие координаты цели и самолета. Из рис. 5.2 следует, что требуемый курс
- текущие координаты цели и самолета. Из рис. 5.2 следует, что требуемый курс
(5.3)
где все координаты zu, zc и хц, хс формируются на основании измеренных в РЛС дальностей Дц, Дс и азимутов (рц, (рс цели и самолета по правилу:
(5.4)
Преимуществами метода прямого наведения является его инвариант ность к дальности и высоте полета цели и самолета, простота информацион но-вычислительной системы и хорошее сопряжение со всеми методами само наведения.
При наведении на движущиеся ВЦ прямой метод в общем случае обес печивает полет самолета по криволинейной траектории (кривой погони). Если перехват цели выполняется из задней полусферы (ЗПС), то кривизна траекто рии будет незначительной и наводимый самолет сможет выполнять маневры преследования с допустимыми поперечными перегрузками. Если же перехват осуществляется из передней полусферы (ППС), то на конечном участке

траектории ОУ все равно должен быть выведен в ЗПС (рис. 5.2). При этом может возникнуть ситуация, когда выполнить такой разворот с допустимыми перегрузками невозможно. В итоге либо возникнут недопустимо большие ошибки наведения, либо наводимый самолет разрушится при движении по требуемой траектории, отмеченной на рис. 5.2 точками 0С ,1,2,3,4,...
Рис. 5.2
Следует отметить, что наведение по криволинейным траекториям приво дит к уменьшению дальности действия системы наведения в целом и увеличе нию времени наведения. Однако наиболее значительным недостатком прямого наведения является ограничение направлений перехвата движущихся ВЦ толь ко задней полусферой.
Метод маневра (метод прямой с разворотом) обеспечивает вывод истре бителя в зону обнаружения цели бортовой РЛС или ОЭС под заданным углом ψκ на заданном расстоянии 0СК0ЦК (рис. 5.3), где точки 0СО и 0ЦО соответствуют положению самолета и цели в начале дальнего наведения, в то время как 0СК и 0ЦК - в момент его окончания. Траектория наведения при этом методе состоит из трех участков: отрезка прямой 0СОАЬ дуги с радиусом R и отрезка прямой А20ск. Расчет этих участков выполняется по довольно сложным формулам, для реализации которых необходимо оценивать дальности до цели и истребителя, их азимуты и скорости. Кроме того, необходимо знать допустимые радиус раз ворота и диапазон углов ±ψκ, дальность рубежа захвата 0СК0ЦК и суммарное вре мя, затрачиваемое на вывод самолета в точку 0СК.
Достоинство метода - его хорошее сопряжение со всеми методами са монаведения и возможность использования как радиолокационных, так и опти-

Рис. 5.3
ко-электронных визирных систем. Последнее обусловлено тем, что истреби тель может быть выведен на рубеж захвата в ЗПС, в которой ОЭС имеют наи большую дальность захвата по факелу двигателя. Кроме того, данный метод позволяет вывести истребитель в заданное относительно цели положение и тем самым обеспечивает наибольшую эффективность применения оружия, а также осуществить обход опасных или запретных для полетов зон воздушного про странства.
Недостатки метода - большое время, затрачиваемое на выход самолета на рубеж захвата, большой расход топлива, что сокращает время на ведение воздушного боя, ограничения на ракурсы перехвата, обусловленные необхо димостью вывода самолета в ЗПС, сложность расчетов траектории и ее вы полнения.
В ряде случаев может быть предусмотрен метод наведения, содержащий два участка полета по дугам окружностей [3, 7].
Метод перехвата представляет собой разновидность метода параллельно го сближения [7]. Особенностью является то, что по методу параллельного сближения наводится не сам истребитель, а некоторая фиктивная точка А, рас положенная по вектору скорости Vc на расстоянии Д3 захвата цели бортовой визирной системой (рис. 5.4). Это означает, что в процессе дальнего наведения прямая АОц перемещается параллельно самой себе. Такой прием обеспечивает нахождение истребителя в точке 0СК на рубеже захвата Д3 в тот момент, когда точка А «встретится» в упрежденной точке встречи 0ут с целью.
Используя координаты цели хц, zn и самолета хс, zc и учитывая, что упреж денная дальность Ду равна сумме Д3 и расстояния 0С0СК, пролетаемого истреби телем за время наведения tH, определим систему уравнений
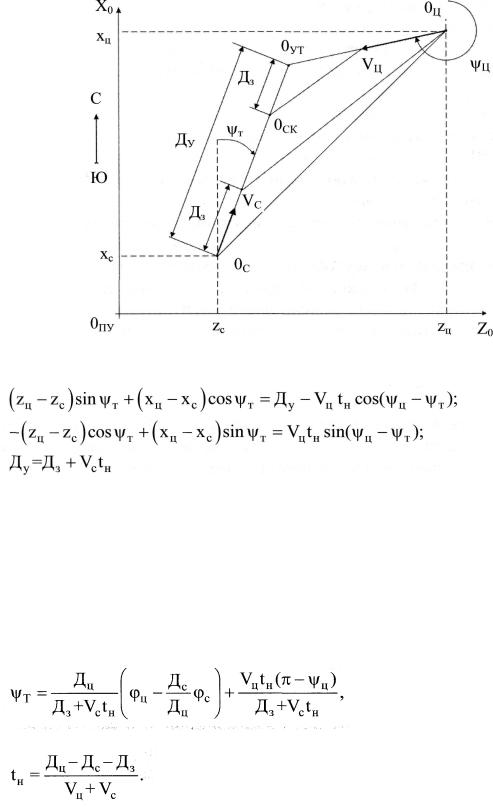
Рис. 5.4
(5.5)
с тремя неизвестными ψτ, tH и Ду.
При получении (5.5) полагалось, что цель и истребитель движутся равно мерно и прямолинейно со скоростями V4 и Vc и курсовыми углами ψ4 и ψτ со ответственно. Решая эту систему при условии, что прямоугольные координаты определяются по правилу (5.4), вычисляют ψτ, tH и Ду.
Достаточно просто решение системы (5.5) получается при условии, что истребитель наводится на встречных либо догонных курсах. В такой ситуации с учетом (5.4) из (5.5) можно получить [12]
(5.6)
где
; (5.7)
Из (5.6) и (5.7) следует, что для реализации метода перехвата необходимо оценивать дальности и азимуты цели и истребителя, а также скорости Vn и Vc и курсовой угол цели \|/ц. Последнее требует достаточно длительного сопровож дения цели.
Достоинства метода перехвата:
высокая экономичность наведения, обусловленная наведением в упреж денную точку практически по прямолинейной траектории;
обеспечение заданного рубежа перехвата при любом направлении пере хвата.
Недостатки метода перехвата:
невозможность сопряжения с прямыми методами самонаведения при пе рехвате цели в ППС;
зависимость направления атаки цели от исходного положения цели и ис требителя и параметров их полета;
отсутствие фиксированного угла атаки в момент окончания дальнего на ведения.
Последнее оказывается неудобным для дальнейшего применения визир ных систем различной физической природы. Так, например, применение этого метода делает затруднительным использование ОЭС, поскольку ее дальность захвата в значительной степени зависит от ракурса перехвата [14].
5,2.3. Методы наведения по высоте
При перехвате воздушной цели траектория истребителя в вертикальной плоскости связана с режимом его полета. Режим полета определяет значение радиуса действия истребителя по запасу топлива и его среднюю скорость Vcp. Чем больше Vcp, тем при прочих равных условиях меньше время перехвата и глубина проникновения цели, но и тем меньше радиус действия истребителя. - Поэтому режим полета задают таким образом, чтобы обеспечить максимум Vcp при условии нахождения рубежа перехвата в области, достижимой по запасу топлива.
Нахождение оптимального режима полета истребителя является сложной задачей. В связи с этим на практике используют субоптимальные типовые ре жимы полета на перехват. Эти режимы характеризуются программами набора высоты Η и скорости V, программами работы двигателя и профилями полета.
В основе типовых вариантов (программ) набора высоты и скорости полета лежат так называемые базовые программы, которые близки к энергетически оптимальным программам, обеспечивающим минимум времени, пути и расхо да топлива [3, 7]. Базовая программа состоит из участков, на которых выдер живается постоянное значение скорости полета и высоты. Она задается в виде зависимости скорости или числа Μ от высоты полета.
При планировании перехвата значение высоты атаки На задается, а на ско рость ее выполнения Va налагаются определенные ограничения. Базовая про грамма не содержит участка, необходимого для выхода на заданные значения На и Va, и поэтому в большинстве случаев не обеспечивает выведение истребителя
на заданные для выполнения атаки значения высоты и скорости, что при Va < Vmax требует выполнения «сходов» с программы. В принципе эти сходы можно выполнять маневром «горка», т. е. с потерей скорости, но подобные ма невры при перехвате нежелательны. В то же время при На, на несколько кило метров меньших высоты потолка самолета Нп, выполнение схода при некото рой постоянной скорости, называемой программной скоростью VN, не приво дит к существенным потерям во времени или расходе топлива. В этом случае сход с базовой программы проводится при скорости VN > Va, дальнейший по лет осуществляется при постоянном значении этой скорости и только на за ключительном этапе перехвата выполняется маневр выхода на высоту и на скорость атаки. На практике ограничиваются максимум четырьмя разными значениями VN, наибольшее из которых близко к Vmax, а наименьшее - к крей серской скорости VKp [3,7]. В зависимости от условий перехвата выбирают одно из этих значений и соответствующее ему значение Va.
В некоторых случаях (например, при высоте На, существенно отличаю щейся от Нп) сход с базовой программы проводится при V « Va и дальнейший полет на перехват, заканчивающийся выходом на Η = На, осуществляется на этой скорости.
При дальнем наведении радиус действия истребителя, т. е. расстояние от аэродрома взлета до рубежа, предельного по запасу топлива, зависит от высоты атаки цели На, используемых программ набора высоты и скорости VN, а также от режима работы двигателя. Для упрощения решения задачи перехвата ис пользуют несколько типовых видов программ полета, под которыми пони мают совокупность программ набора скорости и высоты и программ работы двигателя. Они определяют логику включения форсажа и наличие или отсутст вие установившихся (балансных) участков полета. Обычно применяются сле дующие типовые программы [3, 7], обозначаемые буквой п: ближняя или фор сажная (п = 1), средняя или комбинированная (n = 2) и дальняя или крейсерская (n = 3). Ближняя программа обеспечивает полет с максимальной скороподъем ностью, средняя - минимум проникновения цели при заданном остатке топли ва, дальняя - полет с минимальным расходом топлива.
Ближняя программа реализуется при форсажном режиме работы двигате ля. Максимальный радиус действия при ближней программе получается при включения форсажа с момента взлета. При этом за счет работы двигателя на полном форсаже обеспечивается наискорейший выход на максимально допус тимое значение скорости полета VN = Vmax и расходуется весь запас топлива, за исключением топлива, необходимого для возвращения на аэродром посадки.
При использовании средней программы форсаж включается в некоторой регулируемой точке участка набора высоты. Полет на участке дозвукового на бора высоты или его части выполняется при работе двигателя на максимале. Это приводит к увеличению радиуса действия самолета по сравнению
с ближней программой, поскольку расход топлива, затрачиваемый на кило метр пути, для бесфорсажных режимов работы двигателя существенно мень ше, чем для форсажных. Средней программе соответствуют два балансных участка. Соотношение продолжительностей полета на первом (при V = VKp) и втором (при V = VN) участках может быть найдено из условия расхода всего топлива, выделенного на выполнение перехвата и привода на аэродром по садки, что обеспечивает минимум глубины проникновения цели. Максималь ный радиус действия при средней программе соответствует случаю включе ния форсажа в момент достижения самолетом крейсерской высоты Нкр. Сред нюю программу часто называют программой с регулированием точки включения форсажа.
Дальняя программа характеризуется наличием установившегося участка полета на крейсерской высоте при соответствующем дроссельном режиме ра боты двигателя. Увеличение радиуса действия достигается за счет роста длины участка крейсерского полета. Максимальный радиус действия при дальней программе будет при наиболее позднем включении форсажа, когда время, ос тавшееся до конца наведения, равно времени, требуемому на набор высоты Η = На и скорости V = VN > VKp [3, 7].
Рубеж перехвата целей зависит не только от программы работы двигателя, по существу определяющей момент включения двигателя, но и от профиля по лета, характеризующего зависимость высоты полета от пути или времени. Как правило используются типовые профили полета двух типов: по потолкам и на высоте атаки цели.
На рис. 5.5 приведены профили полета для типовых видов программ, со ответствующих η = 1, 2, 3 [3,7]. Профиль полета по потолкам предусматрива ет набор высоты и скорости до VN, продолжение набора высоты с этой скоро стью на полном форсаже до момента достижения самолетом базовой высоты HN (оптимальной для полета на дальность при данной скорости), полет на этой высоте и снижение на V = VN до Η = На, выполняемое по специальной команде «Вертикаль». Такой профиль полета обеспечивает превосходство истребителя над целью по запасу полной энергии и позволяет весьма существенно увели чить радиусы действия истребителя, особенно на сверхзвуковых скоростях и при малых высотах атаки. Кроме того, эти профили вплоть до момента выдачи на борт истребителя команды «Вертикаль» на выполнение маневра выхода на На позволяют истребителю выполнять наивыгоднейший по расходу топлива полет независимо от фактической высоты цели, которая может измеряться с большими ошибками и меняться из-за ее маневра. Недостатком рассматривае мого профиля по сравнению с режимом полета на Η = На является усложнение процедуры пилотирования на этапе маневра снижения для выхода в атаку.
При профиле полета на высоте атаки цели осуществляется набор высоты На, разгон до скорости Va и горизонтальный установившийся полет при Η = На,

Рис. 5.5
V = Va при дроссельном режиме работы двигателя. Данный профиль может оказаться рациональным при применении истребителей вблизи линии фронта, что затруднит их обнаружение наземными РЛС противника. При этом сход с базовой программы набора, выполняемый по команде «Вертикаль», проводится при достижении истребителем высоты Η = На.
Следует отметить, что указанные профили полета состоят из типовых уча стков полета, при этом профиль полета может иметь этапы неустановившего ся и установившегося полетов.
Этапы установившегося полета называют балансными, поскольку путем изменения их продолжительности обеспечивается временной баланс, т. е. ра венство времени полета истребителя и цели до точки встречи. При полете по потолкам эти этапы выполняются на режимах с минимальными при данных значениях скоростей расходами топлива.
Весь профиль полета на перехват и привод на аэродром посадки может быть разбит на 11 участков, показанных на рис. 5.6 [3, 7]. Из них три участка являются балансными. Первый балансный участок (крейсерский) длиной Дкр проходит на высоте Η = Нкр со скоростью V = VKp, второй балансный участок (программный) длиной Дн на высоте Η = HN со скоростью V=VN и третий ба лансный участок на приводе длиной Дпр - на высоте  со скоростью
со скоростью
Участки первого разгона и набора (j = 0 и j = 1) могут выполняться как на форсаже, так и без него. На участке второго разгона (j = 3) скорость самолета

Рис. 5.6
возрастает от VKp до VN, а на участке j = 4 (второй набор) при постоянной ско рости VN достигается высота HN. При выходе на На и Va (j = 6) производится снижение вначале с постоянной скоростью, а затем с торможением. При выхо де на высоты, близкие к статическому потолку или превышающие его, переход на На и Va осуществляется маневром «горка» с потерей скорости. На приводе (j = 8 - 10) после торможения может проводиться либо набор высоты при
V = VKp с На на Нкр (при На < Нкр), либо снижение при Vnp = const с На на Нкр. Как в том, так и в другом случае после завершения балансного участка выполняется
снижение при Vnp = const на скорость Vnoc и высоту Нпос захода на посадку. Разбиение профиля полета на указанные на рисунке участки позволяет за-
табулировать характеристики (время, путь и расход топлива) неустановивших ся по высоте или скорости участков полета, что необходимо для определения возможности и параметров перехвата.
5.3. Координированное наведение групп летательных аппаратов
Координированное наведение имеет место при одновременном наведении группы истребителей на воздушные и особенно групповые цели. Координация процедур наведения различных групп наводимых ЛА на цель должна обеспе чить их одновременный вывод в заданные районы относительно цели на задан ные расстояния и под заданными углами к траектории движения поражаемых объектов [9, 15]. При этом целесообразно обеспечивать вывод наводимых