

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfправильного решения об обнаружении трассы цели. На рис. 3.8 и 3.9 показана зависимость вероятности обнаружения трассы Ρ от числа поступивших изме рений к для различных значений вероятности обнаружения цели Рпо· Рис. 3.8 соответствует критерию два из трех, рис. 3.9 - критерию последовательного анализа Вальда.
Рис. 3.8
Рис. 3.9
Видно, что вероятность обнаружения трассы возрастает с увеличением ве роятности правильного обнаружения БРЛС и числа циклов проверки перед принятием окончательного решения.
Скорость завязки характеризуется временем реакции алгоритма принятия решения, под которым понимается интервал времени между входом новой це ли в зону обзора БРЛС и принятием решения о ее наличии. В общем случае это время - случайная величина, поэтому обычно используют ее математическое ожидание и дисперсию, аналогами которых являются среднее число циклов до принятия решения и дисперсия их отклонений.
Важным фактором, влияющим на достоверность и скорость завязки целей, является размер стробов отождествления. С одной стороны, увеличение разме ров этих стробов позволяет повысить вероятность повторного обнаружения ин тенсивно маневрирующих целей на следующем цикле измерений. С другой стороны, увеличивается вероятность попадания в большой строб совсем другой цели. В связи с этим важной задачей является обоснование оптимальных в не котором смысле размеров корреляционных стробов.
Суть одной из наиболее простых методик выбора размеров стробов ото ждествления состоит в следующем.
Пусть на k-м цикле обзора получены некоррелированные измерения
(3.11)
то которым принято предварительное решение о наличии цели.
Для следующего цикла фазовая координата Xj экстраполируется по закону  (3.12)
(3.12)
(3.11) и (3.12)  - центрированный гауссовский шум с известной диспер- !ей - интервал времени между двумя обзорами.
- центрированный гауссовский шум с известной диспер- !ей - интервал времени между двумя обзорами.
Если скорость х(к) в (3.12) не измеряется, то она полагается случайным уссовским процессом с нулевым средним. Дисперсия этого процесса Dki
итывает степень неопределенности возможных значений скорости. В такой туации разность измерений
(3.13)
«условленная перемещением цели за время Т, также представляет центрирошный гауссовский случайный процесс с дисперсией
(3.14)
Тогда для разности измерений Δζ практически достоверно будет выпол няться условие  . Отсюда следует, что величину
. Отсюда следует, что величину
(3.15)

можно использовать в качестве строба отождествления для фазовой координа ты Xi. На практике коэффициенты ki3, определяющие заданную вероятность по падания Δζι в выбранный строб, выбираются в пределах
(3.16)
Необходимо отметить, что для различных фазовых координат Xj и на раз ных циклах измерений значения ki3 могут быть различными.
Недостатком данного метода является нестрогость допущения о гауссовском характере распределения неизмеряемых скоростей ц, закон распределе ния которых более точно соответствует равновероятному. Однако этот недос таток проявляется лишь при выборе размеров первого строба для второго цик ла измерений, после которого уже можно вычислить скорость Xj, рассчитать более точное значение дисперсии D^ и скорректировать размеры строба. Если же скорость Xj измеряется (вычисляется), то в формуле (3.15) дисперсия D^ определяется дисперсией Dild измерений (вычислений) скорости. В такой си туации применение формулы (3.15) является более правомерным.
В [19] рассмотрен другой способ получения (3.15), основанный на использовании свойств распределения квадратичной формы AzjDki по закону хиквадрат.
3.2.3. Сопровождение целей и фильтрация траекторий
Фильтрация траекторий и применение алгоритмов фильтрации необходи мы для сглаживания данных о наблюдаемых целях и прогнозирования после дующего положения цели [9]. Сопровождение начинается с формирования прогнозированного значения в положении цели на основе данных первого из мерения (первого значения вектора состояния цели). Прогнозируемое значе ние координат цели используется для установки строба соответствия в пози цию возможного последующего положения цели. Наиболее близкое к центру строба соответствия значение измеренного положения цели в следующем так те используется для последующего шага в построении траектории и т. д.
Система координат, в которой выполняется сопровождение целей, обыч но прямоугольная, хотя положение цели относительно БРЛС определяется в сферической системе координат: дальность, азимут и угол места цели, а так же, возможно, и относительная скорость движения цели. Сопровождение це лей в сферической системе связано с большими вычислительными трудно стями, так как^даже при прямолинейном движении цели с постоянной скоро стью в уравнениях сопровождения появятся члены с ускорениями по всем координатам.

Наиболее удобно и просто использовать алгоритмы линейной фильтра ции координат типа так называемых а-, β-фильтров. Сглаживание в этом слу чае определяется следующими уравнениями (для каждой из координат):
|
|
|
(3.17) |
|
|
|
(3.18) |
|
|
|
(3.19) |
где |
- сглаженное значение координаты χ на k-м такте обзора (оценка |
||
значения х); |
- сглаженное значение скорости по оси х; |
- прогно |
|
зируемое значение положения цели по оси χ на k-м такте обзора. Τ - период обзора или, точнее, интервал обновления данных о цели;  - измеренные
- измеренные
значения координат на k-м такте; α и β - коэффициенты сглаживания (коэффи циенты усиления невязки измерений).
Прогнозируемое значение вычисляется по формуле (3.19) при условии по стоянства скорости цели
Коэффициенты сглаживания могут быть постоянными или адаптивными. Если коэффициенты адаптивны, то они зависят от статистических свойств раз личий между прогнозируемым и измеренным значениями и от шумов измере ний. Если коэффициенты α и β постоянны, то фильтр называется α-, β- фильтром. Если коэффициенты а и β адаптивны, то алгоритм соответствует фильтрации Калмана. В общем случае постоянные коэффициенты а- и β- фильтра могут изменяться в процессе сопровождения цели в зависимости от номера такта к:
(3.20)
(3.21)
Если номер такта увеличивается, то при неизменном законе движения це ли коэффициенты α и β приближаются к нулю, обеспечивая глубокое усредне ние (сглаживание) измеренных значений координат. Обычно применяют в про цессе сопровождения два-три изменения значений коэффициентов α и β: на на чальном этапе сопровождения, на среднем участке, например, при к от трех до шести, и при установившемся состоянии, когда k = 10-15.
Если известна модель движения цели, то оптимальным линейным фильт ром сглаживания и оценивания координат, как известно, является фильтр Кал мана. Работа фильтра Калмана во многом аналогична а-, β-фильтру, за исклю чением того, что коэффициенты сглаживания определяются в зависимости от
уровня шумов измерений и погрешностей прогноза. В частности, коэффициент α может быть выбран в соответствии с формулой
(3.22)
где  - дисперсия погрешности прогнозирования положения цели на (к+1)-м
- дисперсия погрешности прогнозирования положения цели на (к+1)-м
такте; - дисперсия погрешности измерения положения цели.
- дисперсия погрешности измерения положения цели.
Фильтр Калмана представляет собой рекурсивный фильтр, который ми нимизирует среднеквадратическую ошибку текущего оценивания координат цели. В реальных системах АК РЛДН фильтр Калмана реализовать достаточно сложно, во-первых, из-за большого объема требуемых вычислений в бортовой ЭВМ и, во-вторых, из-за необходимости точно знать модель движения цели. Система фильтрации в режиме АСЦРО по своей природе достаточно противо речива: она должна обеспечивать хорошее сглаживание текущих оценок коор динат цели при наличии шумов измерений (коэффициенты α и β при этом должны быть малыми) и в то же время система сопровождения должна хорошо отслеживать внезапные маневры цели (коэффициенты α и β должны быть при этом достаточно большими).
Модель прямолинейного движения цели с постоянной скоростью является наиболее простым вариантом, при котором сопровождение выполняется доста точно просто. При наличии маневра цели характеристики сопровождения су щественно ухудшаются. При этом увеличивается различие прогнозируемого и измеренного положения цели, что может привести в итоге к срыву сопровож дения цели. Для устранения указанного недостатка в системах АСЦРО иногда применяют вариант фильтрации с использованием так называемого режима «обнаружения маневра». В этом случае в системе сопровождения формируют ся два строба соответствия (рис. 3.10).
Первый строб - строб соответствия для неманеврирующей цели, а второй строб - для маневрирующей цели. Центры стробов совпадают и соответствуют прогнозируемому положению цели на k-м такте сопровождения. Если обнару жена цель в области строба для неманеврирующей цели, то а-, β-фильтр сле жения работает в режиме, который был установлен для неманеврирующей це ли. В этом случае, когда обнаруженная цель вышла из строба неманеврирую щей цели и находится в пределах строба для маневрирующей цели, принимается решение, что цель совершает маневр, и для сопровождения такой цели полосу а-, β-фильтра следует увеличить. Увеличение полосы пропускания фильтра соответствует увеличению значений коэффициента а. Энергично ма неврирующая цель сопровождается, если коэффициент α выбрать в пределах 0,8...0,9, а слабо маневрирующая цель достаточно хорошо сопровождается при значении α порядка 0,1...0,15. Для устранения опасности принять появление
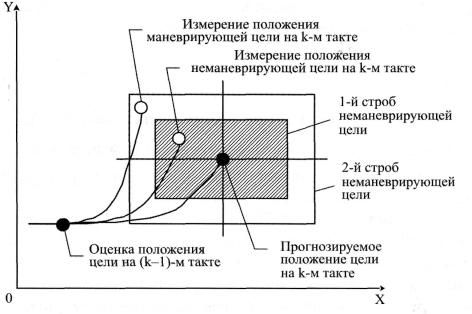
Рис. 3.10
ложной цели, обусловленное превышением порога обнаружения шумами или. преднамеренными помехами, при наличии признака маневра цели дополнитель но «завязывается» новая траектория. Таким образом, траектория цели на k-м так те раздваивается: одна траектория сохраняет характер движения цели, который был на более ранних тактах, другая, новая, соответствует маневру цели. На сле дующем такте обнаружения (или через один такт) неопределенность, связанная с наличием двух траекторий, устраняется путем стирания данных о новой ветви траектории, если получила подтверждение траектория для неманеврирующеи цели. Если же маневр подтвердился, то стираются данные о продолжении «ста рой» траектории. Другое возможное решение состоит в том, что применяется фильтр Калмана с новой моделью движения цели, обусловленной маневром.
3.3.Алгоритмы автоматического сопровождения целей
врежиме обзора с адаптивной коррекцией прогноза и бесстробовой идентификацией радиолокационных измерений
Расширение номенклатуры сверхманевренных самолетов [1-3] и интен сивное развитие групповых действий с большим числом самолетов в сложных быстроизменяющихся условиях применения, потребовали разработки более со вершенных разновидностей АСЦРО, основанных на использовании более сложных моделей движения, бесстробовых методов идентификации и более
сложных алгоритмов адаптивной фильтрации. Некоторые варианты таких ал горитмов АСЦРО приведены в [6, 15, 16].
Ниже рассматривается один из перспективных алгоритмов АСЦРО, в ко тором органично сочетаются высокая точность оценивания координат при со провождении маневрирующих целей, основанная на адаптивной коррекции прогноза, и высокая разрешающая способность, дающая возможность досто верно сопровождать близкорасположенные цели при весьма незначительной требуемой производительности бортовой вычислительной системы [13].
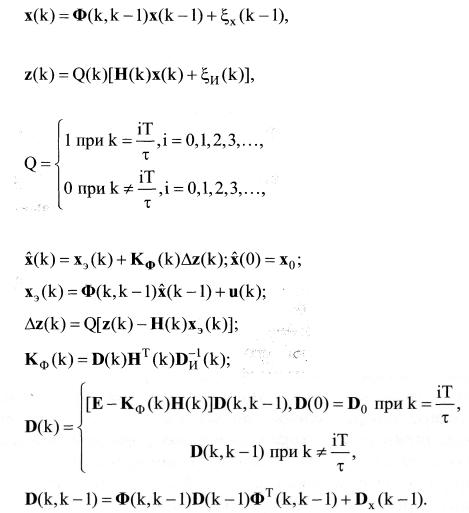
Для решения этой задачи целесообразно использовать алгоритм адап тивной аналого-дискретной фильтрации с коррекцией прогноза, который позволяет для процесса
(3.23)
по идентифицированным измерениям
(3.24)
где
(3.25)
сформировать оценки по правилу
(3.26)
(3.27)
(3.28)
(3.29)
(3.30)
(3.31)
χ, хэ, χ - n-мерные векторы состояния, экстраполяции и оценок; Φ - пере ходная матрица состояния; ζ - m-мерный ( m < η ) вектор измерений; Η - мат рица связи ζ и χ; Dx и DH - ковариационные матрицы шумов состояния ξχ и измерений ξΗ ; τ - интервал экстраполяции; Τ - период обращений к цели; Q - признак наличия измерений; Кф - матрица коэффициентов усиления не-
вязки  - апостериорная и априорная ковариацион ные матрицы ошибок оценивания; Ε - единичная матрица;
- апостериорная и априорная ковариацион ные матрицы ошибок оценивания; Ε - единичная матрица;
(3.32)
(3.33)
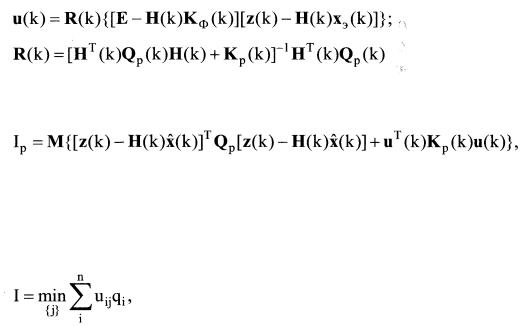
- адаптивная поправка прогноза, оптимальная по минимуму функционала ка чества [14]
(3.34)
в котором  - соответственно матрицы штрафов за точность прибли
- соответственно матрицы штрафов за точность прибли
жения χ κ ζ и за величину управляющих поправок u .
Решение о принадлежности полученного измерения (3.24) той или иной из экстраполируемых траекторий (3.27) принимается по минимуму функционала
(3.35)
формируемого по результатам полученных измерений на основе вычисления Uy для всех j-x экстраполируемых траекторий. Очевидно, что при соответствии
полученных измерений экстраполируемой траектории они незначительно от личаются от  в (3.32) и u(k) будет минимальным. Если измерения приходят от другой цели, то невязка в (3.32) увеличивается, что приводит к увеличению иу· и, соответственно, к увеличению функционала (3.35). Та траек тория, для которой функционал (3.35) будет наименьшим, и считается иденти фицированной. Использование бесстробового метода идентификации, осно ванного на экстремальном (3.35), а не на пороговом критерии, позволит суще ственно снизить недостатки стробовой идентификации [15].
в (3.32) и u(k) будет минимальным. Если измерения приходят от другой цели, то невязка в (3.32) увеличивается, что приводит к увеличению иу· и, соответственно, к увеличению функционала (3.35). Та траек тория, для которой функционал (3.35) будет наименьшим, и считается иденти фицированной. Использование бесстробового метода идентификации, осно ванного на экстремальном (3.35), а не на пороговом критерии, позволит суще ственно снизить недостатки стробовой идентификации [15].
Ниже будут рассмотрены совместно функционирующие алгоритмы экс
траполяции, идентификации радиолокационных измерений и коррекции результатов экстраполяции по идентифицированным измерениям в пред положении, что завязка траектории уже выполнена одним из известных спосо бов [6]. Этап ранжирования целей и сброса траекторий не рассматривается.
В существующих бортовых РЛС алгоритмы многоцелевого сопровожде ния базируются на использовании простейших моделей движения с постоян ными скоростями [8, 11]. Принципиальной причиной использования таких гру бых моделей в АК РЛДН являются большие интервалы времени между поступ лениями отраженных сигналов при механическом сканировании антенной, превышающем время жизни сложных гипотез движения воздушных целей. Ис пользование ФАР с электронным управлением лучом позволяет существенно
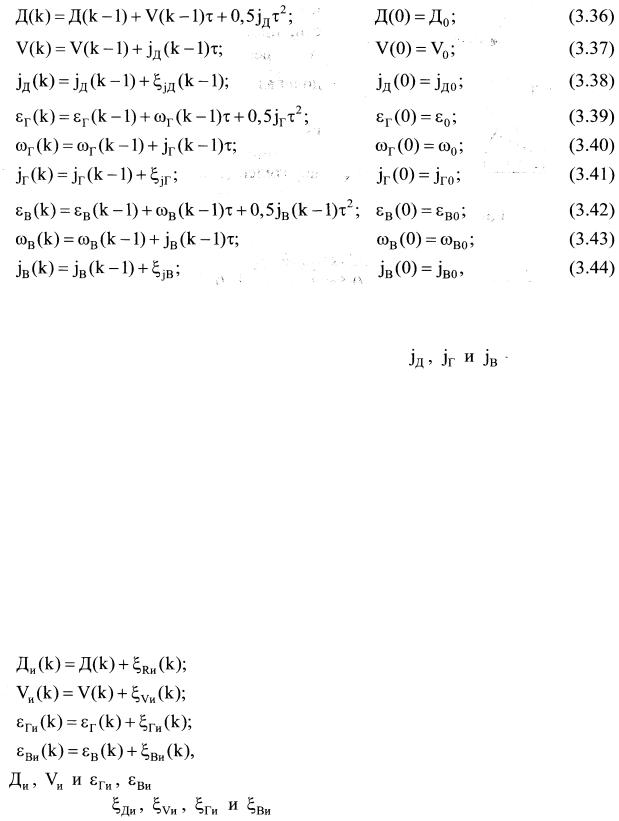
сократить интервалы времени между обращениями к одной цели. С учетом это го возможно использовать для прогноза модели движения третьего порядка:
в которых Д и V - дальность до цели и скорость сближения с ней; εΓ, εΒ и ωΓ, ωΒ - соответственно углы визирования и угловые скорости линий визиро
вания в горизонтальной и вертикальной плоскостях; |
- продольное |
и поперечные в горизонтальной и вертикальной плоскостях ускорения; к - номер интервала дискретизации  - центрированные гауссов-
- центрированные гауссов-
ские шумы состояния с известными дисперсиями D^ , Dj r и Ό-Β .
Следует отметить, что модели состояния (3.36)-(3.44) обеспечивают оце нивание всех фазовых координат, используемых в современных методах наве дения.
Для формирования оценок всех фазовых координат (3.36)-(3.44) в соответ ствии с критерием наблюдаемости [10] необходимо, как минимум, измерять дальность и углы визирования εΓ и εΒ. При использовании импульсно-
доплеровского режима работы РЛС с высокой частотой повторения достаточно просто измеряется скорость сближения (доплеровская частота). Тогда модель наблюдений определяется отношениями
|
(3.45) |
|
(3.46) |
|
(3.47) |
|
(3.48) |
где |
- измеренные значения дальности, скорости и углов ви |
зирования цели; |
- центрированные гауссовские шумы из |
мерений с известными дисперсиями 
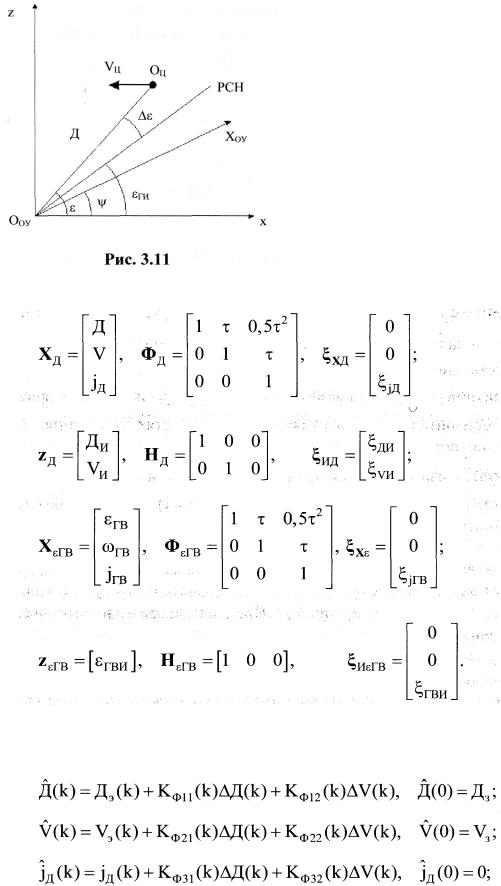
Геометрические соотношения, иллю стрирующие взаимное расположение цели
иносителя РЛС в горизонтальной плоско сти, приведены на рис. 3.11. На рисунке
Уц - вектор скорости цели; 0 Хо у - про дольная ось носителя РЛС; Δε - текущая ошибка измерений; ψ - курс носителя; РСН - равносигнальное направление.
Модели состояния (3.36)-(3.44) и из мерителей (3.45)-(3.48) для дальномерного
иугломерного каналов могут быть пред ставлены в векторно-матричной форме (3.23) и (3.24):
(3.49)
(3.50)
Используя (3.49) в (3.26)-(3.31), получим алгоритм фильтрации в далъномерном канале РЛС:
(3.51)