

Расчёт и выбор электрических исполнительных механизмов эим Данные для расчёта
|
Давление воды перед РО, р1, мПа |
5,98 |
|
Присоединительный (условный) диаметр РО, Ду, мм |
22 |
|
Диаметр седла, dс, мм |
19 |
|
Диаметр штока, dш, мм |
22 |
|
Плечо силы на штоке, b, мм |
46 |
|
Длина рычага РО, r1, мм |
440 |
|
Время запаздывания, , с |
37 |
|
Необходимая характеристика сочленения |
Линейная |
|
Отношение пускового крутящего момента ЭИМ к номинальному, К |
1,7 |
Определим максимальную силу давления среды на затвор и шток. Так как диаметр штока больше чем диаметр седла, то наибольшая сила давления среды на шток будет в положении «открыто», когда перепад давления будет минимален.
![]()
Определим силу трения штока в сальнике
![]()
Так как односедельный РО может быть запорным, то оценим силу, необходимую для создания уплотнительного контакта в жёсткой запорной паре «седло-плунжер»
![]()
Определим максимальное перестановочное усилие на штоке
![]()
Принимаем коэффициент запаса n=3, определяем необходимый момент на рычаге.
![]()
Определим необходимый крутящий момент на выходном органе ЭИМ
![]()
Определим номинальное время полного хода ЭИМ
![]()
Из кинематических схем сочленения следует, что в данном случае расчётом определяется только длина рычагов РО r. Выбранный ЭИМ имеет длину рычага R=250 мм.
Определим синус половины угла поворота рычага r из положения
«закрыто » в положение «открыто»
![]()
Определим длину рычага, обеспечивающую ход штока hш=22 мм

Для реализации полученного сочленения необходимо удлинение имеющегося на РО рычага длиной 500 мм до длины 731,8 мм. Такое удлинение сделает сочленение очень громозким и затруднит обеспечение жёсткости рычага. Поэтому целесообразно рассмотреть возможность применения ЭИМ прямоходного типа.
Определим необходимое усилие на конце рычага r1 = 440 мм
![]()
![]()
Определим необходимое усилие на штоке ЭИМ
![]()
Примем ближайшее по ГОСТ 7192-80 номинальное усилие ЭИМ
Рн=2500 Н.
Определим полный ход Н конца рычага РО при его длине r1 = 500мм
![]()
Примем наиболее близкое к Н значение номинального хода выходного штока ЭИМ по ГОСТ, равное НН=160 мм
Определим необходимую длину рычага РО r при сочленении его с прямоходным ЭИМ, имеющим номинальное усилие 2500Н и номинальный ход штока 160мм.
 ,
что меньше r1=440
,
что меньше r1=440
Определим необходимое усилие на рычаге РО длинной r1=334 мм.
![]()
Определим необходимое усилие на штоке ЭИМ
![]() Н,
что приемлемо так как не много больше
Рн=2500Н
Н,
что приемлемо так как не много больше
Рн=2500Н
Окончательно примем прямоходный ЭИМ по ГОСТ 7192-80, типа МЭП, имеющий номинальное усилие на выходном штоке 2500Н, ход штока 160 мм, время полного хода 63с. При этом длину рычага РО округлим до 330 мм. Характеристика сочленения – линейная.
Выбор регулятора
Основы выбора закона регулирования
Для выбора регулятора необходимо знать:
параметры объекта Коб , Т и τ, определяемые по кривой разгона;
максимальное допустимое динамическое отклонение Х1=0,7(единиц регулируемой величины);
допустимое или желаемое перерегулировапие (выбрать один из типовых переходных процессов);
допустимое остаточное отклонение ρ=0,7 (единиц регулируемой величины);
допустимое время регулирования tр=450 с ;
максимально возможные значения возмущения μ(Ув)=20 ,% хода РО.
Допустимые значения параметров определяются технологическим процессом.
Тип регулятора (непрерывный, релейный, импульсный) можно ориентировочно выбрать по величине отношения τ/Т:
τ/Т Регулятор;
<0,2 Релейный;
< 1,0 Непрерывный;
>1,0 Импульсный или непрерывный.
Для регуляторов непрерывного действия необходимо выбрать закон регулирования, используя следующую методику. Рассчитывают динамический коэффициент регулирования
Rд=Х1/Коб μ%=0,7/0,38*20=0,09
для астатических объектов
Rд=Х1Т/τ μ%
По графикам рис. 5.1 и по таблице выбирают простейший регулятор, обеспечивающий нужное значение Rд (И-регулятор на астатических объектах не применяют, так как такие системы всегда неустойчивы). П-регулятор
Rд=0,6
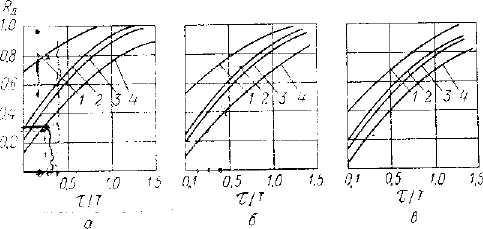
Рис. 5.1. Динамические коэффициенты регулирования на статических объектах: а — апериодический процесс; б — процесс с 20%-ным перерегулированием; в — процесс с
min ∫ х2dt;
1 — И-регулятор; 2 — П-регулятор; 3 — ПИ-регулягор; 4 — ПИД-рсгулятор
Затем проверяют по графикам рис. 5.2 для статических объектов и по табл. 5.1 для астатических объектов, обеспечит ли выбранный регулятор заданное время регулирования tp если не обеспечивает, то выбирают более сложный регулятор. Статическую ошибку определяют по рис. 5.8а и, если она больше допустимой, то вместо П-регулятора выбирают ПИ-регулятор.
Можно не определять заранее желательный тип переходного процесса, а задаваться только допустимыми значениями X1, p, tр . Тогда по графикам рис. 5.1, выбирают такой переходный процесс, который возможен при установке наиболее простого регулятора.
|
|
Апериодический процесс |
Колебательный процесс с 20% | ||
|
Регулятор |
регулирования |
перерегулированием | ||
|
|
Rд |
Tр/ τ |
Rд |
Tр/ τ |
|
П |
2,9 |
6 |
1,4 |
8 |
|
ПИ |
1,4 |
14 |
1,3 |
16 |
|
ПИД |
1,3 |
9 |
1,1 |
12 |
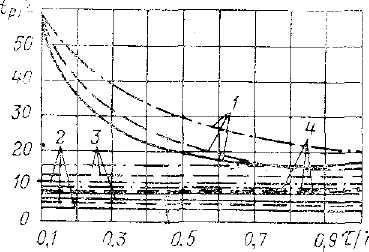
Рис.5.2 .Зависимость tр/τ от динамических свойств объекта τ/Т и типовых процессом регулирования;1—И-регулятор;2—П-регулятор;3—ПИ-регулятор;4—ПИД-регулятор;апериодический процесс;процесс20%-ным перерегулированием; процесс с min ∫х2dt
Tр/ τ=10
После выбора закона регулирования подбирают конструкцию регулятора. Данные по наиболее часто применяемым регуляторам приведены в табл. 6.1. Более полные сведения можно получить в справочниках [7; 8; 14].
Тип регулятора РБА (аналоговый) , 0-5мА , Кр=0,3-50 , Ти=5-500 с , Тд=0-100 с