

Динамический расчет сар
Расчет САР с серийными регуляторами заключается в определении настроек регуляторов, обеспечивающих заданноекачество переходных процессов.
Регуляторы непрерывного действия
Регуляторы непрерывного действия имеют следующие передаточные функции и настройки:
П-регулятор Wп (p) = Кр, коэффициент передачи Кр, % хода РО/ед. per. Величины;
И-регулятор Wи (p) = Кр1/р , коэффициент передачи Кр1 % хода РО/ед. per. Величины;
ПИ-регулятор Wпи(р)=Кр(1+1/Тир) , коэффициент передачи Кр , % хода РО/ед. регулируемой величины; время изодрома Ти , с;
ПИД-регулятор Wпид(р)=Кр(1+1/Тир+Тпрр), коэффициент передачи регулятора Кр, % хода РО/ед. регулируемой величины; время изодрома Ти , с; время предварения Тпр , с.
Приближенные значения настроек регуляторов для типовых переходных процессов (рис. 4.4) можно подсчитать по формулам табл. 5.2.
Кр=![]()
Более точно настройки регуляторов рассчитывают по АФХ объекта регулирования с тем, чтобы достигнуть заданного затухания переходного процесса в САР, характеризуемого показателем колебательности М.
Кроме того, при этом выполняется требование минимизации квадратичного интегрального критерия качества (при данной колебательности процесса). Значение М обычно выбирают в пределах 1,1÷2,4 для типовых переходных процессов приближенно М=1,3 при 20%-ном перерегулированиии М = 2,1 при процессе с min ∫ х2вых.об dt.
Метод графического расчета настроек основан на том факте, что АФХ разомкнутой системы регулирования
W(jω)=Wоб(jω)*Wp(jω)
должна касаться окружности с заданным индексом М.Радиус этой окружности
r= M2/(M2—1)=1,22/(1,22-1)=3,3
ее центр лежит на отрицательной вещественной полуоси и отстоит от начала координат на расстоянии
R=M2/MZ—1=0
П - р е г у л я т о р. Методика определения коэффициента передачи регулятора состоит в следующем.
Строят (рис. 5.3, а) АФХ разомкнутой системы с П-регулятором, коэффициент передачи которого равен единице W(jω)=Wоб(jω)Wp(jω) (характеристика совпадает с АФХ объекта, но не имеет размерности). Из начала координат под углом
β=arcsin1/М= arcsin1/1,2=56,4˚
к отрицательной вещественной полуоси проводят луч. Циркулем проводят окружность с центром на вещественной отрицательной полуоси, касающуюся, одновременно построенной АФХ и луча, и измеряют радиус окружности г:
Кр=![]() =
=![]()
Часто расчет проводят для значения М=1,62 (ή=34%), тогда Кр =1/r; β = arcsin 1/M = 38°.
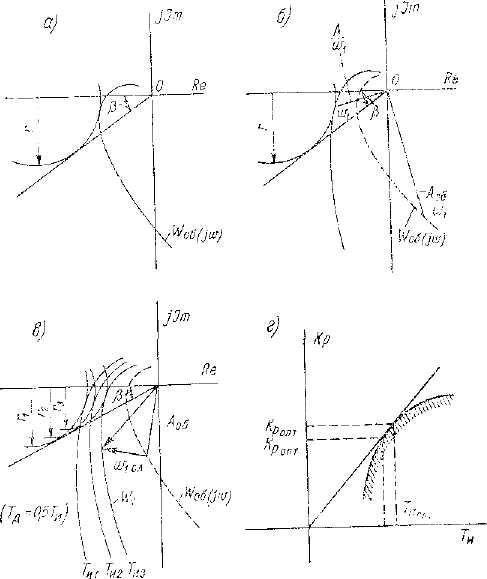
Рис. 5.3. Определение коэффициента передачи регулятора по АФХ объекта регулирования: а — П-регулятор: б — И-регулятор; в— ПИ-регулятор; г — определение точки в плоскости настроек Кр и Ти, соответствующей оптимальным настройкам регулятора
Принципиальная электрическая схема
Принципиальные электрические схемы определяют полный состав приборов, аппаратов и устройств (а также связей между ними), действие которых обеспечивает решение задач управления, регулирования, защиты, измерения и сигнализации.
Принципиальные схемы служат основанием для разработки других документов проекта.
При разработке систем автоматизации технологических процессов принципиальные электрические схемы обычно выполняют применительно к отдельным самостоятельным элементам, установкам или участкам автоматизируемой системы. Схема должна обеспечивать высокую надёжность, простоту и экономичность, чёткость действий при аварийных режимах, удобство оперативной работы, эксплуатации, чёткость оформления.
При всём многообразии принципиальных электрических схем в различных системах автоматизации любая схема, независимо от степени сложности, представляет собой определённым образом составленное сочетание отдельных, достаточно элементарных цепей и типовых функциональных узлов, в заданной последовательности выполняющих ряд стандартных операций: передачу командных сигналов от органов управления или измерения к исполнительным органам, усиление или размножение командных сигналов, их сравнение, превращение кратковременных сигналов в длительные и, наоборот, блокировку сигналов и т.п. К элементарным цепям могут быть отнесены типовые схемы включение измерительных приборов различного назначения.
.