

отчет матлаб 2
.docxМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых»
(ВлГУ)
Кафедра БЭСТ
Лабораторная работа №2
Проектирование регулятора для линейной системы
по дисциплине:
«Основы управления техническими и биотехническими системами»
Вариант 4.
Выполнил:
Студент группы БТС-115
Куликов К.В.
Проверил:
Долгов Г. Ф.
Владимир 2018 г.
Цели работы: освоение методов проектирования регулятора для одномерной линейной непрерывной системы с помощью среды Matlab
Задачи работы:
- научиться строить модели соединений линейных звеньев
- научиться использовать модуль SISOTool для проектирования простейших регуляторов
1.Описание системы
Исследуется система управления судном по курсу, структурная схема которой показана на рисунке.
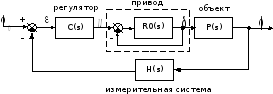
Движение судна описывается линейной математической моделью в виде передаточной функции
P(s)= где K=0,07рад/сек,
Ts=16,6
сек,
где K=0,07рад/сек,
Ts=16,6
сек,
Привод моделируется как интегрирующее звено
R0(s)= ,
Ts
=
16.6 сек,
,
Ts
=
16.6 сек,
охваченное единичной отрицательной обратной связью. Модель измерительного устройства представляет собой апериодическое звено с передаточной функцией
H(s)
=
 Toc=4
сек,
Toc=4
сек,
2.Исследование разомкнутой системы
Передаточная функции рулевого устройства
R(s)=
Передаточная функция последовательного соединения объекта с приводом
G(s)
=

Переходная характеристика этой модели:
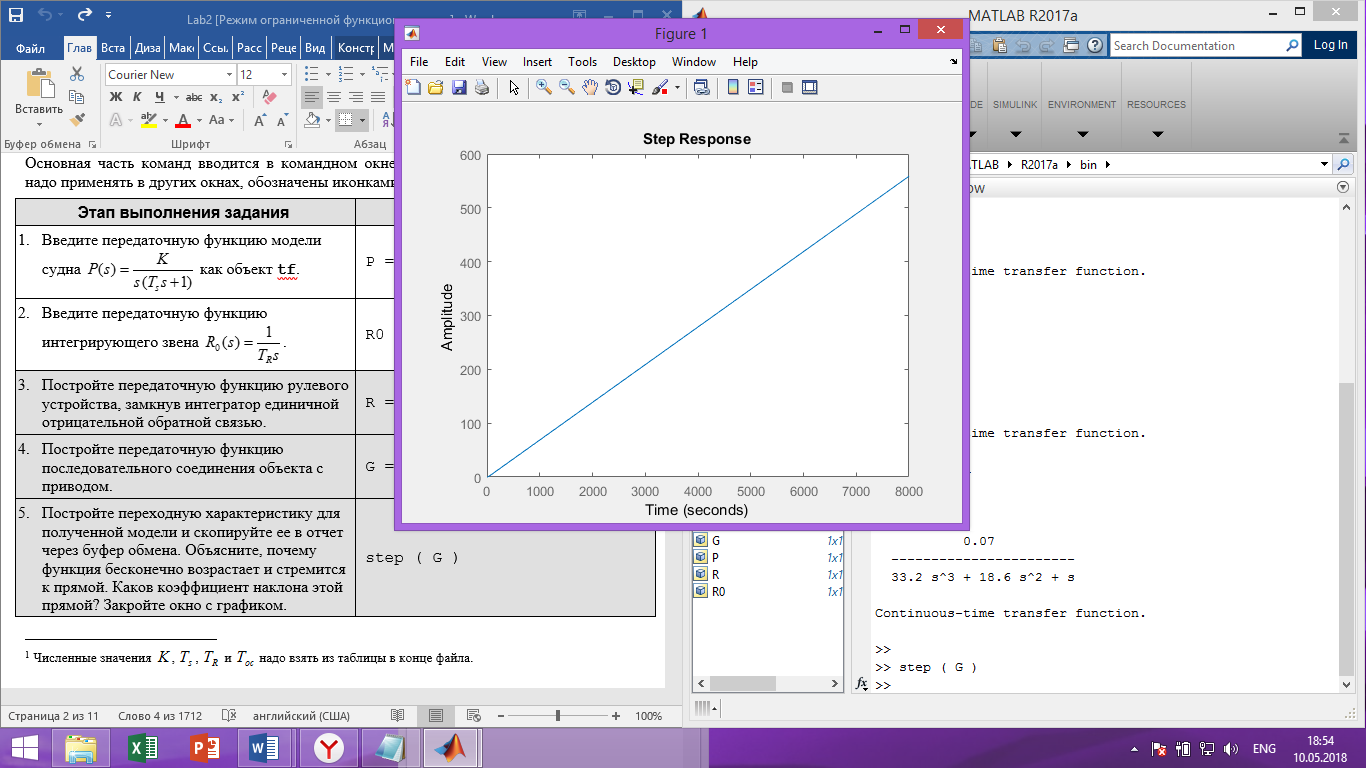
График стремится к наклонной прямой, потому что в системе P(s) содержится последовательно подключённый интегратор. ЛАФЧХ разомкнутой системы

Система
с регулятором
 устойчива, запасы устойчивости: по
амплитуде – 9.06 дБ, по фазе – 31.7
градусов.
устойчива, запасы устойчивости: по
амплитуде – 9.06 дБ, по фазе – 31.7
градусов.
Максимальный коэффициент усиления разомкнутой системы равен 337 дБ
3.Исследование системы с пропорциональным (П-) регулятором
Переходная
функция замкнутой системы при
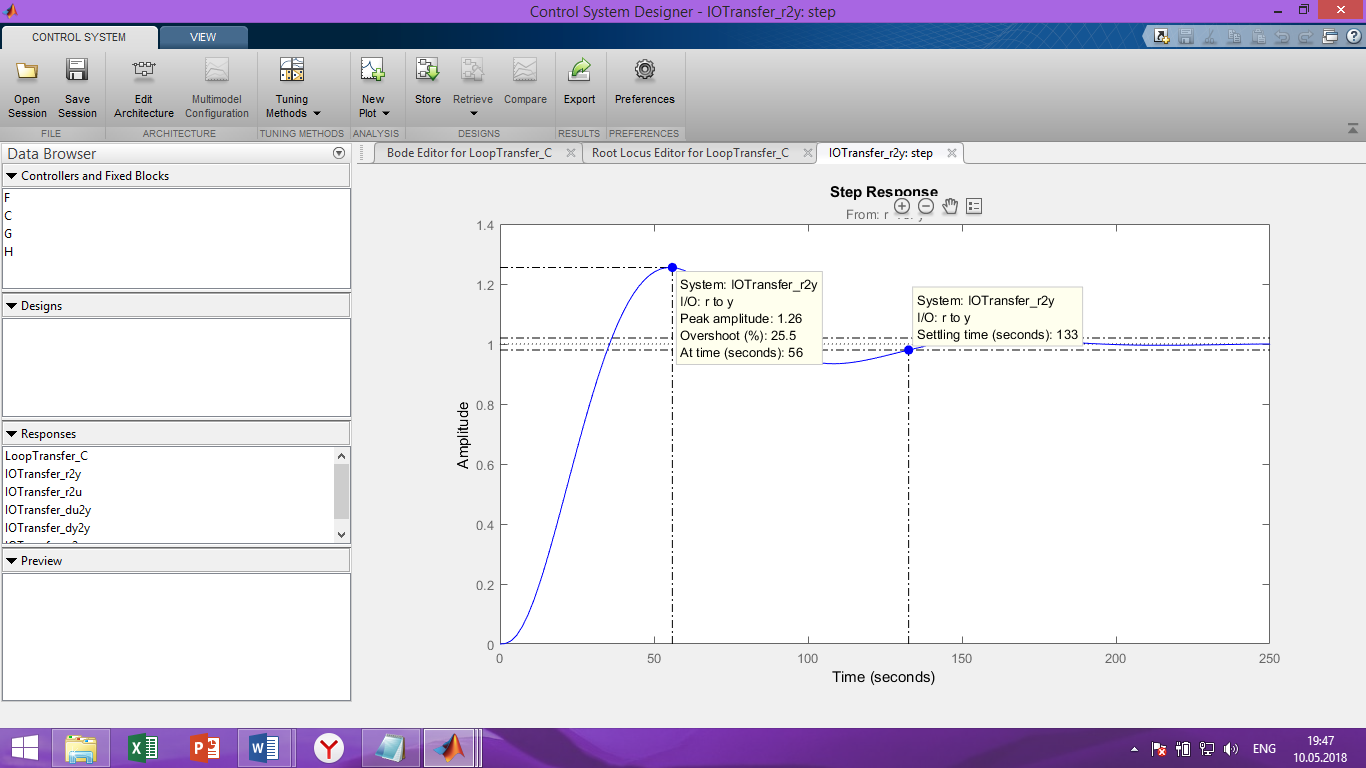
Время переходного процесса Tn= 133сек, перерегулирование δ = 25.5% .
Для
обеспечения перерегулирования не более
10% требуется уменьшить коэффициент
усиления регулятора до значения

Переходная
функция скорректированной замкнутой
системы при

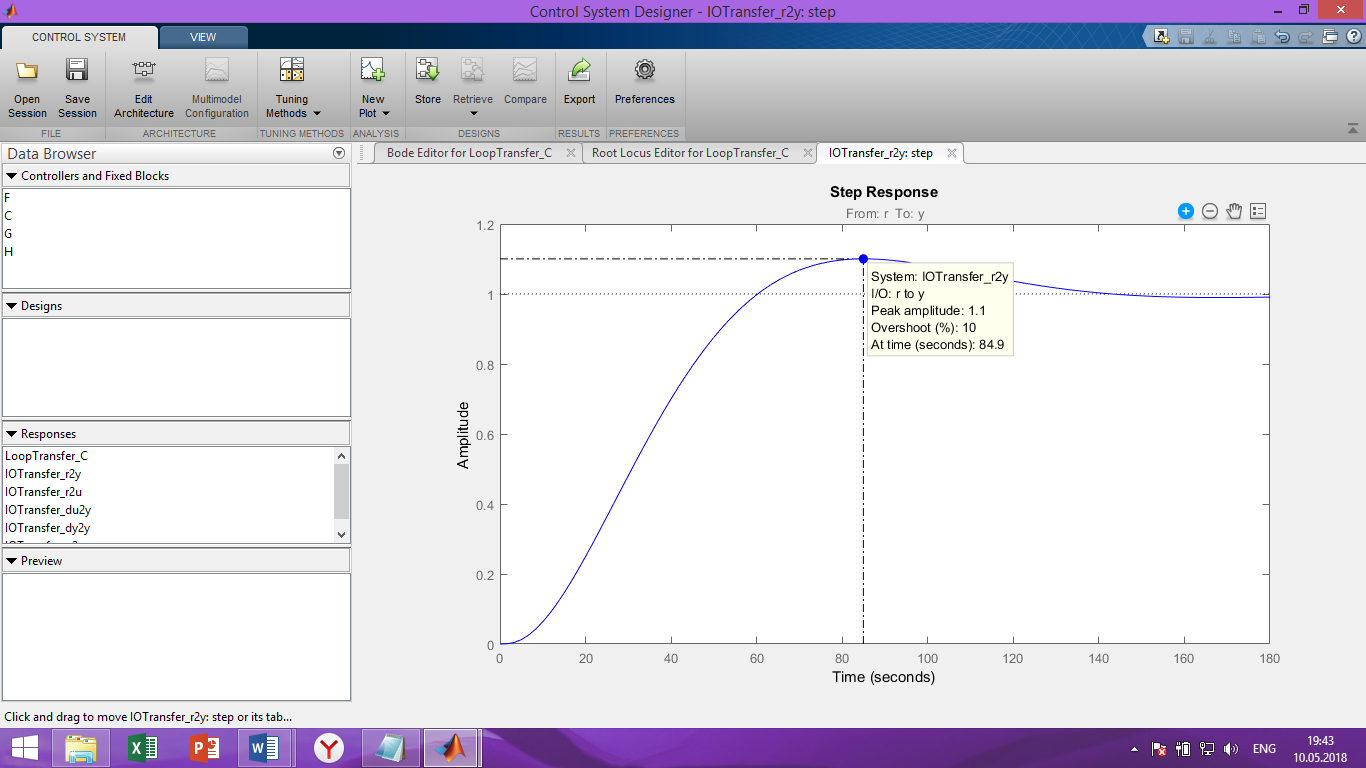
Время переходного процесса 84.9 сек,
4.Исследование системы с пропорционально-дифференциальным (ПД-) регулятором
Общий вид передаточной функции регулятора
C(s)
= Kc(1+ ), где
Ts
= 18,6 сек, Tv=
1сек,
), где
Ts
= 18,6 сек, Tv=
1сек,
а коэффициент Kc должен быть выбран в процессе проектирования в соответствии с требованиями к системе.
4.1 Регулятор, обеспечивающий перерегулирование 10%
Для
обеспечения перерегулирования 10%
требуется выбрать

Переходная функция скорректированной замкнутой системы
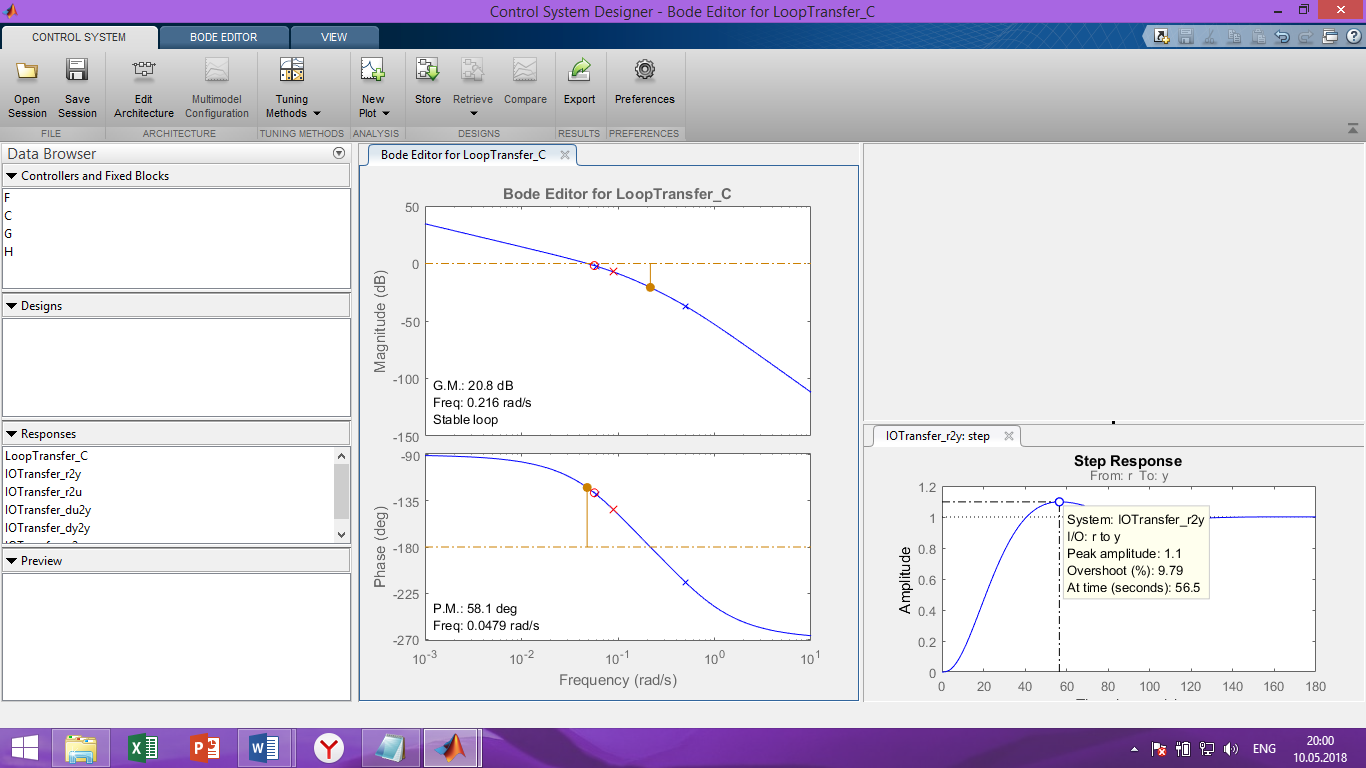
Время переходного процесса 56.5 сек,
4.2 Регулятор, обеспечивающий кратчайший переходный процесс
Для
обеспечения минимального времени
переходного процесса требуется выбрать

Переходная функция скорректированной замкнутой системы

Время
переходного процесса
 сек,
сек,
Запасы устойчивости: по амплитуде 1.11 дБ, по фазе 11 градуса.
Передаточная функция замкнутой системы
0.0025349 s (s+0.05682) (s+0.06024) (s+0.08982)
(s+0.25) (s+0.5)
------------------------------------------------------
s (s+0.08982) (s+0.06024) (s+0.05562) (s+0.3008)
(s+0.4859) (s+0.5) (s^2 + 0.05767s + 0.004428)
Полюса передаточной функции
-0.5102 + 0.0000i
-0.4882 + 0.0000i
-0.2602 + 0.0000i
0.0199 + 0.0363i
0.0199 - 0.0363i
-0.0923 + 0.0592i
-0.0923 - 0.0592i
-0.0569 + 0.0000i
Близость полюсов к мнимой оси означает, что степень устойчивости системы невелика. При этом запас устойчивости больше, чем в случае полюсов расположенных на большем расстоянии от мнимой оси.
Коэффициент усиления системы в установившемся режиме равен 1. Это объясняется тем, что коэффициент усиления объекта равен бесконечности.
При постоянном сигнала установившаяся ошибка отсутствует, потому что разомкнутая система содержит интегратор.
При линейно возрастающем сигнале установившаяся ошибка пропорциональна коэффициенту наклона сигнала, потому что система содержит один интегратор.
При
использовании датчика, описываемого
моделью ,
,
коэффициент усиления в установившемся режиме будет равен 7,1429, потому что предел передаточной функции системы при s=0 равен 7,1429.
Полученная система является астатической, то есть, отслеживает без ошибки постоянный входной сигнал. Это определяется тем, что разомкнутая система содержит последовательно подключённый интегратор (имеет полюс в точке s=0).
При линейно возрастающем сигнале установившаяся ошибка пропорциональна коэффициенту наклона сигнала.
Передаточная функция замкнутой системы от входа к сигналу управления
1.2023 s (s+0.05682) (s+0.06024) (s+0.25) (s+0.5)
-------------------------------------------------------------
(s+0.4859) (s+0.3008) (s+0.05562) (s^2 + 0.05767s + 0.004428)
Изменение сигнала управления при единичном ступенчатом входном сигнале
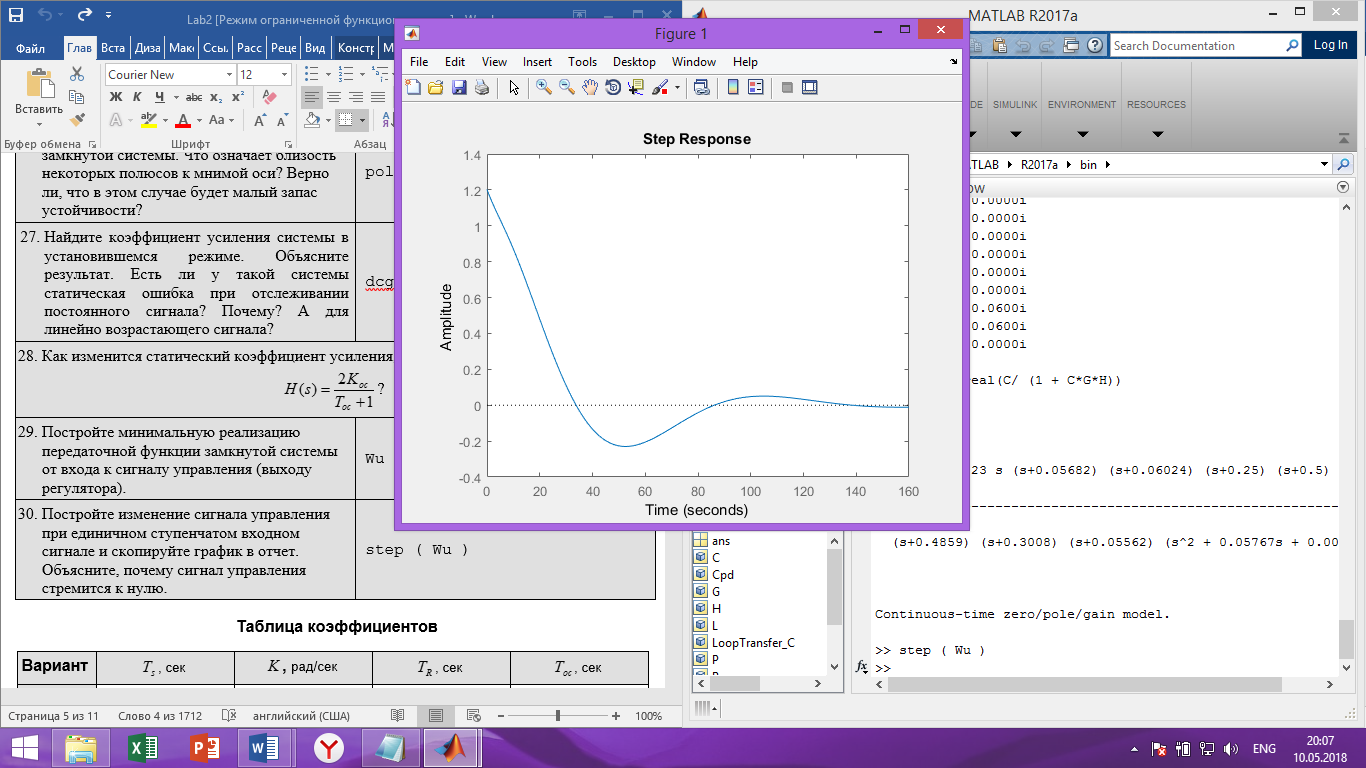
Сигнал управления стремится к нулю, потому что передаточная функция замкнутой системы от входа к сигналу управления имеет нуль в точке s=0.
Вывод: в данной лабораторной работе освоили методы проектирования регулятора для одномерной системы с помощью среды MATLAB. Научились строить модели соединений линейных звеньев, использовать модуль SISOTool для проектирования простейших регуляторов.