

2. Асинхронный двигатель
Асинхронный двигатель наиболее распространен в качестве электропривода различных механизмов благодаря своей простоте и надежности. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном с помощью асинхронных двигателей. Созданы они были 100 лет назад русским ученым М.О.Доливо-Добровольским. В настоящее время по международному стандарту разработана единая унифицированная серия асинхронных двигателей АИ и 5А.
Асинхронный двигатель изготавливается в однофазном, двухфазном и трехфазном исполнении. Мощность двигателей колеблется от десятков ватт до сотен киловатт. По конструкции роторов они делятся на две группы. Первая с фазным ротором и вторая с короткозамкнутым. У двигателя с фазовым ротором к цепи ротора посредством коллекторно-щеточного механизма подключается сопротивление. В начальный момент пуска сопротивление уменьшает пусковой ток, и ротор находится в заторможенном состоянии. Затем сопротивление уменьшают, и двигатель плавно запускается. Короткозамкнутый ротор изготавливается из металлической болванки и магнитопровода, в пазы которого укладываются алюминиевые стержни и накоротко замыкаются.
 синхронный
двигатель состоит из статора с обмоткой,
к которой подводится трехфазное
напряжение, и ротора, который вращается
посредством вращающегося магнитного
поля, создаваемого системой трехфазного
тока.
синхронный
двигатель состоит из статора с обмоткой,
к которой подводится трехфазное
напряжение, и ротора, который вращается
посредством вращающегося магнитного
поля, создаваемого системой трехфазного
тока.
Рассмотрим вращающееся поле переменного тока трехфазной цепи асинхронного короткозамкнутого двигателя с тремя обмотками, сдвинутыми по окружности на 120 и соединенными звездой.
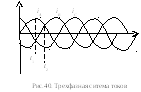
Обмотки статора питаются трехфазным симметричным напряжением (рис.40). Начальную фазу тока в обмотке А-х принимаем равной нулю. Тогда iA = Imsint, iB = Imsin(t–120), iC = Imsin(t + 120).
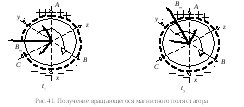
В момент времени t1: iA 0, iB, iC 0. Если ток фазы А положителен, т.е. течет от начала к концу, то пользуясь правилом правоходового винта, можно найти картину распределения магнитного поля для времени t1.
В момент времени t2 вектор результирующей магнитной индукции Bm развернется на угол 1 и далее по часовой стрелке с периодом обращения 360. Угол 1 = 60.
Таким образом, магнитная индукция представляет собой вращающееся поле с амплитудой Bm рез = 3/2Bmsin(t-), (рис.41).
При синусоидальном характере вращающегося поля его скорость n0 равна отношению /р (где р – число пар полюсов). В рассматриваемом примере р = 1 и частота вращения равна соответственно 3000 оборотов в минуту. Если число катушек в каждой фазе увеличить в два раза, а сдвиг фаз между токами сохранить равным 120, то частота вращения уменьшится в два раза за счет увеличения числа пар полюсов. Особенностью асинхронного короткозамкнутого двигателя является наличие постоянной частоты вращения, определяемой числом пар полюсов. Если поменять местами питание фаз, то возникнет поле обратной последовательности и ротор будет вращаться в другую сторону. Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора n0 и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора,
s = ns/n0, ns = n0 – n,
где s – скольжение, при номинальной мощности двигателя скольжение составляет 0,01-0,03.
Основное вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС, аналогичные трансформатору, так как при разомкнутом роторе асинхронный двигатель представляет собой трансформатор в режиме холостого хода,
Е1s = 4,441Кобм1W1Ф; Е2s = 4,442Кобм2W2Ф,
где индекс 1 относится к параметрам статора, а 2 – к параметрам ротора; Кобм – обмоточные коэффициенты, определяемые способом укладки обмоток (петлевая или волновая). Кобм = 0,92-0,98; Е2s = Е2s; Е2 – действующее значение эдс неподвижного ротора при s = 1; 2 = 1s.
В асинхронном двигателе кроме основного магнитного потока создаются потоки рассеяния. Один охватывает проводники статора, другой ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями Х1 и Х2s.
Уравнения электрического состояния фаз обмоток статора и ротора:
U1 = –Е1 + jX1I1 + R1I1; E2s = jX2sI2s + R2I2s.
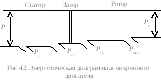
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
Рэ1 =![]() ;
Pэ2 =
;
Pэ2 =![]() ;
;
Рдоб = 0,005Рн; Pмех = К(n010-3)2(D110-2)3,
где К = 2,9-3,6, определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95. Энергетическая диаграмма асинхронного двигателя приведена на рис.42.
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
М = СмФI2scos2s,
где См – конструктивная постоянная; 2s – фазовый сдвиг между током и магнитным потоком.
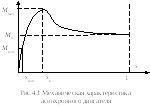
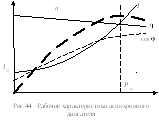
Механическая характеристика двигателя М = f(s) приведена на рис.43.
На участке от 0 до Ммах двигатель работает в устойчивом режиме, а участок от sк называется режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального, в соответствии с каталожными данными составляет 1,6-1,7.
Расчетные формулы для выбора двигателя имеют вид:
М = Р2/n;
Р1 =![]() ;
Р2 = Р1.
;
Р2 = Р1.
Выбор двигателя по каталогу осуществляется следующим образом. По заданному моменту рабочего механизма и частоте вращения определяется необходимая мощность. После этого определяются условия окружающей среды, выбирается исполнение по типу монтажа и высоте оси рабочего вала двигателя. Зная эти параметры, по каталогу проверяются необходимая перегрузочная способность, КПД, масса и момент инерции.
Для шахтных условий используются двигатели взрывозащищенного исполнения, для крановых механизмов – двигатели с повышенным скольжением и т.д. Для регулирования частоты вращения двигателей с короткозамкнутым ротором в настоящее время широко используются частотные преобразователи с микропроцессорным управлением.
В бытовых приборах используются однофазные двигатели. В системах управления используются двигатели, в которых одна из обмоток статора постоянно подключена к сети переменного тока (обмотка возбуждения), а ко второй (обмотка управления) подводится напряжение управления. Такие двигатели относятся к классу микромашин.
Микромашины используются также в информационных системах, где они выполняют функции первичных преобразователей для вычислительных операций в системах автоматики и телемеханики. Одним из примеров является сельсин, предназначенный для передачи на расстояние угловых перемещений валов, механически не связанных друг с другом.