

Лабораторная работа № 1.
МОДЕЛИРОВАНИЕ И ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ХАРАКТЕРИСТИК ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
Цель работы: изучение переходных характеристик типовых динамических звеньев систем автоматического регулирования (САР) и определение параметров передаточных функций по экспериментальным переходным характеристикам.
Общие сведения
Различные элементы автоматических систем, отличающиеся назначением, конструкцией, принципом действия, оказываются сходными по характеру возникающих в них переходных процессов, т.е. по их динамическим свойствам. Для исследования динамических свойств сложной системы целесообразно классифицировать составные части системы не по функциям, выполняемым ими, а по их динамическим характеристикам.
Любую линейную автоматическую систему можно разбить на элементы, описываемые простыми алгебраическими или дифференциальными уравнениями не выше второго порядка. Такие элементы называются типовыми динамическими звеньями.
Для математического описания типовых динамических звеньев используется передаточная функция – особая (операторная) форма записи дифференциального уравнения элементов и систем. Передаточная функция это отношение лапласового изображения выходной величины элемента или системы к лапласовому изображению входной величины при нулевых начальных условиях. Формально передаточная функция получается из дифференциального уравнения элементов или систем путём замены в уравнении d/dt на p или s, где р – общий оператор преобразования, а s – оператор преобразователь Лапласа. В математических программах чаще всего используется оператор s.
Одной из динамических характеристик типовых звеньев и систем в целом является временная характеристика, которая позволяет определить качество процесса регулирования. Для сравнения временных характеристик типовых звеньев рассматривают возникающий в них переходный процесс при соблюдении двух условий: 1) на вход звеньев подается единичная ступенчатая функция x(t) = 1(t – τ), где τ момент приложения входного воздействия к системе управления (см. рис. 1.1; 2) до приложения входного сигнала звено находится в покое. Переходный процесс при таких условиях может быть описан переходной характеристикой h(t). Переходная характеристика это временная зависимость выходной величины в течение переходного процесса при нулевых начальных условиях и входном ступенчатом воздействии.

Рис. 1.1. Единичная ступенчатая функция
В настоящей лабораторной работе исследуются переходные характеристики следующих типовых динамических звеньев: безынерционного (пропорционального), запаздывающего, инерционного(апериодического) 1-го порядка, инерционного (апериодического) 2-го порядка, колебательного, реального дифференцирующего, идеального дифференцирующего, идеального интегрирующего.
Определения типовых звеньев:
-
безынерционное (пропорциональное) звено это звено, выходная величина которого в каждый момент времени пропорциональна входной величие;
-
инерционное(апериодическое) звено это звено, выходная величина которого при скачкообразном изменении входной величины изменяется по экспоненте, стремясь к установившемуся значению;
-
колебательное звено это звено, выходная величина которого при скачкообразном изменении входной величины имеет колебательную форму;
-
дифференцирующее звено это звено, выходная величина которого пропорциональна скорости изменения входной величины;
-
интегрирующее звено это звено, выходная величина которого пропорциональна интегралу от входной величины;
-
запаздывающее звено это звено, выходная величина которого повторяет входную величину, но с запаздыванием.
Следует знать, что типовые звенья состоят из двух или трёх последовательно включённых элементарных звеньев. Например, инерционное звено состоит из пропорционального звена k и элементарного инерционного звена 1/ (Тр + 1). Такое дробление необходимо особенно при построении частотных характеристик.
Дифференциальные уравнения, передаточные функции и переходные характеристики этих звеньев приведены в табл. 1.1.
Таблица 1.1
Дифференциальные уравнения, передаточные функции и переходные характеристики динамических звеньев
|
Тип звена |
Дифференциальное уравнение |
Передаточная функция |
Переходная характеристика |
|
1 |
2 |
3 |
4 |
|
Безынерционное |
|
|
|
|
Запаз-дывающее |
у = kx(t – τ ) |
W(p) = ke-pτ |
h(t) = k1(t – τ ) |
|
Инерционное 1-го порядка |
|
|
|
|
Инерционное 2-го порядка |
где >1 ( – коэффициент затухания) |
где >1 |
где >1 |
Окончание табл. 1.1
|
1 |
2 |
3 |
4 |
|
Колебательное |
( – коэффициент затухания) |
где <1 |
где
|
|
Реальное дифференцирующее |
|
|
|
|
Идеальное дифференци-рующее |
|
W(p) = kp |
h(t) = k(t) |
|
Идеальное интегри-рующее |
|
|
h(t) = kt |

В уравнениях k это коэффициент усиления звена, T – постоянная времени (апериодического) звена, – коэффициент затухания, (t) – дельта-функция, которая описывает импульс с бесконечно малой длительностью.
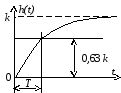
Постоянная времени это время, за которое касательная приложенная к экспоненте в точке нулевого значения экспоненты, достигнет установившегося значения экспоненты.
Экспериментально снятые переходные характеристики звеньев позволяют получить параметры передаточных функций этих звеньев k, T, (см. табл.1.1).
Так, приведенные на рис. 1.3, а – е, з переходные характеристики типовых звеньев позволяют легко найти параметр k их передаточных функций.
П остоянная
времени T
для инерционного звена первого порядка
определяется следующим образом.
Касательная, проведенная к кривой h(t)
в начале координат и продолженная до
пересечения с линией установившегося
значения переходной характеристики,
отсекает на этой линии отрезок, равный
постоянной времени Т
(см. рис. 1.2, в).
Однако этот метод измерения не точен
при ручном приложении касательной.
Поэтому определение Т
следует проводить по построениям,
приведённым на рис. 1.2.
остоянная
времени T
для инерционного звена первого порядка
определяется следующим образом.
Касательная, проведенная к кривой h(t)
в начале координат и продолженная до
пересечения с линией установившегося
значения переходной характеристики,
отсекает на этой линии отрезок, равный
постоянной времени Т
(см. рис. 1.2, в).
Однако этот метод измерения не точен
при ручном приложении касательной.
Поэтому определение Т
следует проводить по построениям,
приведённым на рис. 1.2.
a б
Рис.1.2. Определение Т: а – для экспоненты, б – для обратной экспоненты
Для определения параметров T и инерционного звена второго порядка по экспериментальным данным можно использовать следующий способ. По графику переходной характеристики определяются координаты у(t) и t двух произвольных точек, которые подставляются в выражение для переходной характеристики. В результате получается 2 уравнения, корнями которых являются искомые значения T, . Однако получаются в этом виде громоздкие уравнения. Для упрощённого расчёта можно применить разложение инерционного звена второго порядка на два звена с постоянными времени Т3 и Т4 по формулам:
![]() =
=
![]() =
=
![]() ,
,
г де
Т3,4
= Т1/2
± √ Т12
/ 4 – Т22
; Т1
> 2Т2
; Т3
>Т4 .
де
Т3,4
= Т1/2
± √ Т12
/ 4 – Т22
; Т1
> 2Т2
; Т3
>Т4 .
Определить промежуточные величины а , b , c из построений приведённых на рис. 1.3, г, где наклонная прямая является касательной приложенной к кривой в точке, где касательная при перемещении по кривой снизу вверх изменит левое направление вращения на правое. Oпределяются Т3 и Т4 из системы уравнений:
a = T3 + T4 ; b = T3T4 ln ( T3 /T4 ) / ( T3 + T4 ) ; c = T4 .
Затем определяются Т1 , Т2 , Т и по формулам:
 Т1
= Т3
+ Т4
; Т2
= Т = 0,5
√ Т12
+ 2Т3
Т4
–
Т32
–Т42;
= Т1
/ 2 Т
.
Т1
= Т3
+ Т4
; Т2
= Т = 0,5
√ Т12
+ 2Т3
Т4
–
Т32
–Т42;
= Т1
/ 2 Т
.
|
а |
б |
|
|
a h(t)
0
|
|
в |
г |
|
д |
е |
|
ж |
з |


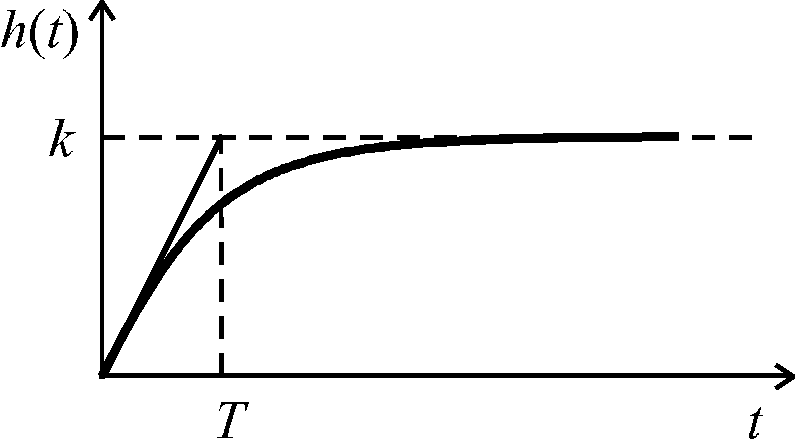

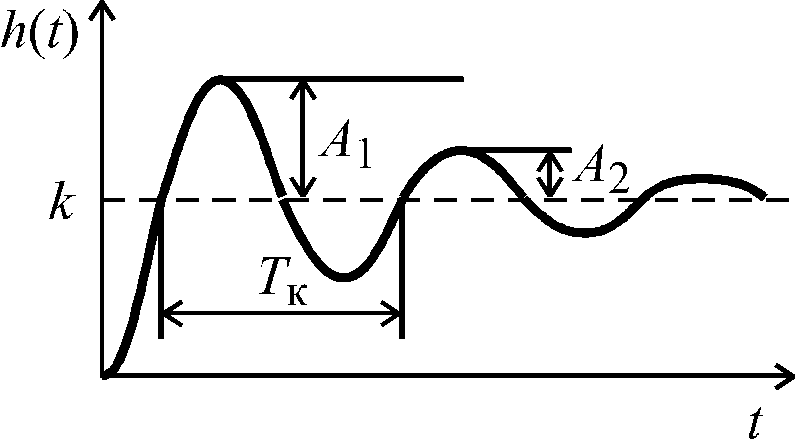



Рис. 1.3. Переходные характеристики типовых звеньев:
а – безынерционного; б – запаздывающего; в – инерционного 1-го порядка;
г – инерционного 2-го порядка; д – колебательного; е – реального дифференцирующего; ж – идеального дифференцирующего; з – идеального интегрирующего
Параметры колебательного звена T и вычисляются путем решения системы уравнений

где
![]() ;
;
![]() .
.
|
Здесь A1, A2 – |
амплитуды соседних колебаний; |
|
Tк – |
период колебаний (см. рис. 1.2, д). |
Постоянная Т для реального дифференцирующего звена определяется как проекция на ось времени точки пересечения переходной характеристики горизонтальной линии на уровне 0,37 h(0) (см. рис. 1.2, б),
а коэффициент усиления k = h (0)T .
Для идеального интегрирующего звена определяется коэффициент усиления k = h(t1) / t1.
Для 4-х звеньев определить погрешность измерения параметров переходных характеристик Т и ξ .